基于不同区间划分的货运列车节能优化策略*
2022-11-03金淼鑫段仁哲易灵芝
李 旺, 金淼鑫, 段仁哲, 易灵芝
(1.中车株洲电力机车有限公司,湖南 株洲 412001; 2.大功率交流传动电力机车系统集成国家重点实验室,湖南 株洲 412001; 3.湘潭大学 自动化与电子信息学院,湖南 湘潭 411105)
0 引 言
货运列车作为铁路运输的骨干,在我国经济社会发展中至关重要。随着货运量日益增加,巨大的能源消耗也不可忽视。如何降低货运列车运行中的能耗已成为新的研究热点。
货运列车节能优化要在保证列车安全、准点的前提下,建立列车节能优化模型,求解模型得到能耗最低的操纵方案。针对货运列车节能优化问题,国内外学者进行了大量研究。Asnis等[1]利用极大值原理求解列车最优操纵工况,得出列车最优操纵工况序列由全力牵引、全力制动、惰行和匀速4种工况组成的结论。贾宝通等[2]以列车工况和对应的工况转换点作为决策变量,利用改进人工蜂群算法求解列车节能模型。柴杨等[3]设计了一种基于极大值原理的动态规划算法,对速度进行离散化处理,提高了求解精度。马阳阳等[4]在列车节能优化模型中加入了时间惩罚函数,进一步降低了列车运行能耗。曹佳峰等[5]提出了一种两阶段的节能优化方法,第一阶段优化各坡道上的速度,第二阶段优化惰行点位置,取得了不错的节能效果。杨杰等[6]采用列车四阶段操纵策略,以列车巡航速度和惰行点位置作为优化变量,得到节能速度曲线。然而上述节能操纵策略大都采用经典的四阶段节能策略,且没有考虑中途有临时限速的情况。
因此,针对上述问题本文设计了一种基于不同区间划分的节能策略,首先计算得到货运列车节时策略下的工况序列,根据这些工况划分不同的运行区间,然后考虑临时限速情况,将惰行工况替代原工况序列中的制动工况形成节能工况序列。同时针对鲸鱼优化算法(WOA)容易陷入局部最优的缺点,提出一种基于自适应权重和柯西变异的改进鲸鱼优化算法(IWOA),并以工况转换点位置作为优化变量,求解得到货运列车节能工况序列下的速度曲线。
1 货运列车节能模型与策略
1.1 货运列车节能优化模型
货运列车运动模型有单质点模型和多质点模型。单质点下货运列车受力分析如图1所示。在平坡道上运行时,采用不考虑列车长度的单质点模型,计算精度和多质点模型差别不大且可以降低计算量,单质点模型计算公式为[7]
(1)
式中:v、s分别为列车当前速度和运行距离;Ft(v)为列车牵引力;Fb(v)为列车制动力;R0(v)为列车基本运行阻力;R1(v)为列车附加阻力;M为列车总质量;γ为列车回转质量系数,一般取0.06。
货运列车基本运行阻力只与列车运行速度有关[7],计算公式如式(2)所示:

(2)
式中:a、b、c为由列车生产厂家确定的经验参数。
货运列车附加阻力的计算采用多质点模型,考虑列车的长度,反映列车经过变坡点和变曲率点的受力渐变过程,提高计算的精度,如图2所示。附加阻力包括坡道附加阻力、曲线附加阻力和隧道附加阻力,其中隧道附加阻力一般不考虑。多质点模型下的附加阻力计算公式为

(3)
式中:ωi、ωr分别为单位坡道和曲线附加阻力;L为列车长度;l为列车越过变坡道或变曲率点的长度;i2、i1分别为变坡点前、后的坡度值;R为曲线半径;A为经验常数,一般取600。
多质点模型考虑了过坡道和曲率点时列车长度对坡道和曲线附加阻力的影响,不同模型下的坡度值计算如图3所示。由图3可以看出,考虑列车长度的多质点模型计算得出的坡度值是渐变的,相比于单质点下的跳跃值更符合实际情况,能显著提高列车牵引仿真计算的准确度。
货运列车的运行能耗包括牵引能耗、制动能耗和辅助能耗,本文的目的是减少列车运行中的牵引能耗从而实现节能,因此仅考虑牵引能耗的计算和优化,不考虑再生制动过程能量的回收与利用。货运列车的运行过程采用步长迭代的计算方法,以时间Δt为步长,每个Δt内近似认为加速度不变,列车做匀变速直线运动,各工况下的计算式为
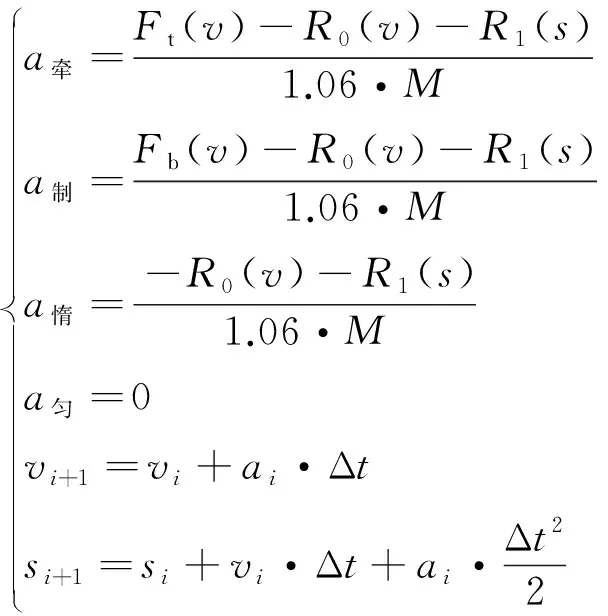
(4)
式中:a牵、a制、a惰、a匀分别为牵引、制动、惰行、匀速情况下列车能保持匀速运行时的加速度;vi+1、vi分别表示第i+1、i个步长内的速度;si+1、si分别表示第i+1、i个步长内的位移;t为时间。
采用牵引力做功的方式计算货运列车的运行能耗,如下所示:

(5)
式中:E牵为牵引过程的总能耗;ΔEi为每个步长t内的能耗。
由于不考虑再生制动能量,因此制动过程和惰行过程的牵引能耗均认为是0。
货运列车的节能运行优化问题可以描述为,计划运行时间内,在满足安全的前提下,找到合适的操纵策略(即不同的工况序列和转换点位置),使列车运行牵引能耗最低。因此,将时间、安全性(即列车运行速度不超过限速)作为优化问题的约束条件,牵引能耗作为优化目标,构建货运列车节能优化模型。约束条件描述如下所示:

(6)
式中:s0、sT分别为列车的初始起动位置和终点停车位置;S为运行区间的长度;v0、vT分别为列车的初始起动速度和终点停车速度;vs、vmax分别为当前s位置列车的实际运行速度和限制速度;T、T计划分别为列车的实际运行时间和计划运行时间;εt为允许时间误差;S工况为工况的长度,要大于等于半个车长。
本文中货运列车采用反推制动点的方法,提前得到进站停车制动曲线,当惰行或匀速曲线与制动曲线相交时,即进入制动工况,如图4所示,此方法能保证货运列车精确停车。
以货运列车最小牵引能耗作为优化目标,在满足各约束条件的情况下,将工况转换点位置作为待优化解,建立货运列车节能运行模型如下所示:
(7)
为了加强对列车运行时间的约束能力,保证列车在允许的时间误差范围内到达终点站,将时间约束以惩罚函数的形式加入到目标函数中,如式(8)所示:
(8)
式中:α为惩罚系数,不同惩罚系数下的惩罚值如图5所示。经过试验得到,惩罚系数为150时,满足要求。
带有时间惩罚函数的适应度函数如式(9)所示:
J=E·(1+KT)
(9)
1.2 货运列车节能策略
文献[1]利用极大值原理推出列车的节能操纵工况应包括全力牵引、匀速、惰行和全力制动工况,其中合理使用惰行工况是列车实现节能的关键。不同的惰行距离将产生不同的能耗,代价则是运行时间的增加。图6和表1分别给出了3种策略下的速度曲线和不同惰行距离下产生的能耗和时间。可以看出,惰行距离最长的曲线比惰行距离短和无惰行下的曲线,能耗分别降低了10.5%和16.7%,时间分别增加了4%和5%。

表1 不同速度曲线的能耗和时间
为了提高货运列车时刻表的鲁棒性,计划运行时间通常都大于最少运行时间,而最少时间曲线中不包含节能的惰行工况,因此本文提出一种基于不同区间划分的节能优化方法,分为两个步骤:首先计算最少时间速度曲线,根据其工况序列构成对区间进行划分,然后利用冗余时间在中间运行路段中插入合适的惰行区间,代替制动区间作为列车减速的方法,从而降低列车运行能耗,并保证运行时间在允许误差范围内。
货运列车最少运行时间曲线对应的是最快速度运行策略,包含全力牵引、巡航和全力制动3个工况,分别用T、K、B表示。该策略下列车加速时全力牵引直到限速,减速时全力制动到下一限速,其余时间都紧贴限速速度运行。当存在临时限速的情况时,根据曲线工况序列对运行区间进行划分,如图7所示。
由图7可以看出,最快速度曲线将列车运行划分为9个区间,不同区间采用了不同的操纵策略,总的工况序列为T-K-B-K-T-K-B-K-B,其中不包含节能的惰行工况和2个途中制动工况,因此能耗相对较高。为了节能,在工况序列中加入惰行工况C,取代不节能的制动和部分匀速工况,构成惰行区间,实现节能的目的。节能区间划分如图8所示。
在图8中,由惰行工况C构成的惰行节能区间取代了由K-B工况序列组成的耗能区间,进站阶段也由原来的K-B工况序列替换为更节能的K-C-B工况序列。
2 基于自适应权重和柯西变异的IWOA
WOA是Mirjalili等[8]在2016年提出的一种新型群智能优化算法,相比于传统的用于列车节能优化领域的粒子群智能算法[9](PSO),其具有更高的寻优能力和收敛速度,但仍存在全局搜索能力和局部开发能力不平衡以及易陷入局部最优的问题,为此提出了一种基于自适应权重和柯西变异的IWOA。
2.1 自适应权重策略
为了平衡算法优化过程中的全局搜索和局部开发能力,在位置更新公式中加入了自适应权重策略[10],自适应权重计算如下所示:
(10)
式中:iter为当前迭代次数;itermax为最大迭代次数。
加入自适应权重的位置更新公式变为

(11)
式中:X(iter+1)、Xg(iter)分别为更新后的位置和上一代中的全局最优位置;r1、r2分别为[0,1]区间的随机数。
2.2 柯西变异策略
为改善算法易陷入局部最优的缺陷,运用柯西变异算子在最优解位置进行扰动变异操作得到新的解,柯西变异公式[11]如下所示:

(12)
式中:r为柯西算子。
变异后解的适应度值大于当前全局最优解的适应度值时,更新全局最优解,小于等于时不更新全局最优解。IWOA求解货运列车节能优化模型的流程如图9所示。
3 仿真分析
为验证所提节能策略和算法的有效性,在MATLAB 2018b中进行了仿真。仿真线路采用的是文献[12]中的线路,线路全长20 km,计划运行时间为1 430 s,允许时间误差为30 s,如图10所示。牵引机车为HXD1型电力机车,货车为C80型号,机车、货车和编组信息分别如表2~表4所示。货运列车牵引、制动和基本阻力曲线如图11所示。
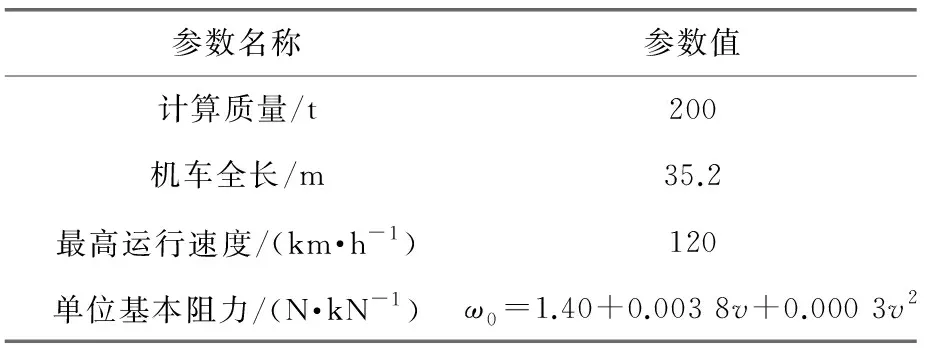
表2 HXD1型机车参数
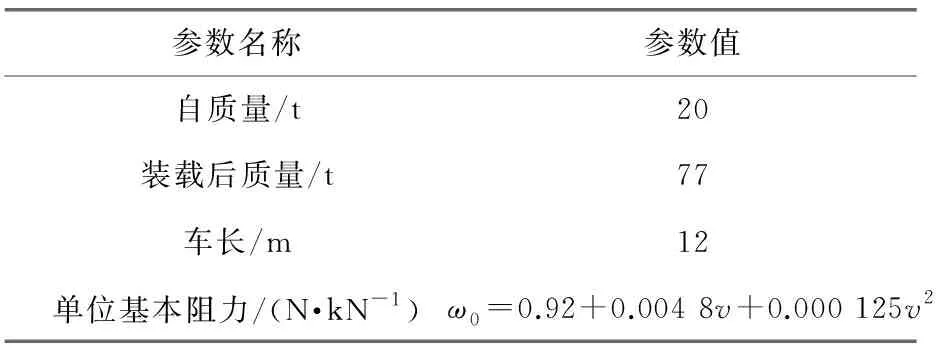
表3 C80型货车参数

表4 编组数据
为了验证所提改进算法的有效性,将其与WOA、PSO在基准测试函数Sphere和Ackley上进行了对比,仿真结果如图12所示。
由图12可知, Sphere函数上的IWOA可以收敛到全局最优解,其他两种算法则无法达到理想效果。 Ackley函数上的IWOA可以快速收敛到全局最优解,证明IWOA的寻优能力强于另外两种算法,改进策略有效。将3种算法分别用于求解货运列车节能优化模型,种群数量30,最大迭代次数100,时间惩罚系数150,各算法参数设置如表5所示,每个算法进行3次重复的独立测试,仿真结果如图13所示。

表5 各算法参数设置
由图13可以看出,IWOA在3次测试内找到的最优解均优于其他两种算法,证明改进后的算法能找到更符合要求的货运列车工况转换点位置,得到的速度曲线能耗更低。取3种算法下各自得到的最优解进行对比,仿真结果如图14和表6所示。

表6 不同优化方法结果比较
由图14和表6可知,3种方法优化得到的速度曲线都满足时间要求,这是因为适应度函数中加入了时间惩罚函数,不满足时间要求的曲线均被淘汰。同时,IWOA所得速度曲线能耗最低,比WOA和PSO分别降低了0.21%和0.67%。
为了验证所提节能策略的有效性,将优化得到的速度曲线与节时策略和经典四阶段运行策略(T-K-C-B)进行比较,结果如图15和表7所示。

表7 不同策略结果比较
图15(b)中2、1、0和-1分别表示牵引T、巡航K、惰行C和制动B。由图15(b)可以看出,本文所提策略优化后的工况序列为T-C-K-T-C-K-C-B,工况序列中降低了牵引和巡航运行的比例,增加了惰行的次数和长度,惰行工况的加入使货运列车牵引能耗不再增加,如图15(c)中2~8 km和11~16 km处所示。由表7可知,对比经典四阶段节能运行策略,基于不同区间划分的节能策略下货运列车的运行能耗减少了5.2%,证明了本文所提节能策略是有效的。
为了进一步验证本文所提节能策略的通用性,选择如图16所示的实际线路再次进行仿真测试。
图16的实际线路中,在9.5~10.5 km处存在一个50 km/h的临时限速。得到此线路下的最快速度曲线如图17所示。
由图17可知,此线路下最快速度曲线的工况序列为T-K-B-K-T-K-B,利用本文所提节能策略在上述工况序列中加入惰行工况C。因为线路开始和结束位置是两个上坡道,如果此处加入惰行工况将导致速度快速降低,不利于列车的安全运行,因此综合考虑后将节能工况序列设置为T-K-C-T-C-K-B。为测试目标函数中加入惩罚函数的作用,分别测试了有惩罚函数和无惩罚函数下的时间和能耗随迭代次数的变化情况,如图18和图19所示。
由图18和图19可知,带时间惩罚函数时,时间将被约束在计划运行时间之内,当提升计划运行时间时,能耗也将随之降低,因此确定合适的计划运行时间也能起到节约能耗的作用。IWOA下的最优解随迭代次数变化曲线如图20所示,可以看出,在迭代次数为第17代左右时就获得了较优的解且不再随着迭代次数增加而变化。
当计划运行时间设置为1 730 s,允许时间误差设置为30 s时,经IWOA优化与采用四阶段节能策略分别得到的速度曲线如图21所示。
由图21可知,相比于四阶段策略,本文所提节能策略优点为在下坡道上充分利用了惰行进行节能,具体优化结果如表8所示。由表8可以看出,四阶段策略虽然简单易操作,但是由于没有考虑线路实际情况有时会找不到合适的巡航转惰行点位置,或者惰行点位置太靠后运行距离很短,导致能耗偏高,如本文中四阶段策略的惰行起始点为18 000 m。过早的惰行会出现这种情况,即由于终点前存在上坡道,货运列车还没惰行到终点速度就已经降为了0。而本文提出的策略综合考虑了临时限速和坡道的影响,在工况序列中加入了两次惰行工况,惰行工况与起动牵引和停车制动工况之间采用巡航工况连接。这是考虑到上坡道不宜采用惰行工况运行,上述工况序列能在满足各项约束的前提下安全准点地运行到终点。在能耗方面,所提策略与四阶段策略相比减少了4.5%,通过在实际线路和仿真线路上的测试证明了所提节能策略的有效性。

表8 不同策略优化结果比较
4 结 语
本文提出了一种基于不同区间划分的节能策略,首先考虑线路中存在临时限速的情形,根据货运列车节时策略下的工况序列将运行划分成不同区间,然后将惰行工况插入原有区间中形成节能工况序列,最后通过与经典四阶段节能策略进行对比证明了本文所提节能策略的可行性。
本文没有研究不同计划运行时间下的能耗情况,后续可以考虑对列车运行时刻表进行优化,进一步降低运行能耗。
