机器人中心手运行精度测量方法的建立与应用研究
2022-11-02王欣王朴
王欣,王朴
(北京奔驰汽车有限公司,北京 100176)
通过研究伯赛在线测量系统的原理与在奔驰项目中的应用方式,结合库卡机器人中心手的结构特点,经过重新设计与布局调整完成库卡机器人运行精度测量平台解决返修中心手、平衡缸、电机等备件的线下测试。
使返修备件在没有上线使用之前,就能在线下完成各种测试工作。例如机器人中心手这种关键性部件,没有经过空载和带载测试以及运行精度与稳定性测量,直接应用到现场,将会造成机机器人运动轨迹偏差、工具碰撞等严重问题。导致设备长时间停机。
装焊车间近1400台机器人共涉及5款中心手,其中,3款轻载,2款重载。首先重点解决KR270/300中心手A6密封圈漏油问题,拆解中心手测绘并采购A4-6轴密封圈,自行完成更换后,由于中心手内部机构复杂,重新装配以后极有可能造成运行精度偏差和稳定性无法保障问题。
因此,针对返修的中心手进行各种测量并根据测试结果进行调整,不但可以减少中心手返厂维修的费用,也可以提高维修人员对机器人机械部件的维修能力,节省备件采购成本。
1 主要研究内容及技术难度
1.1 伯赛测量系统的原理与应用
在线检测技术是一个传感器技术、自动控制和信息处理的综合技术。即通过各种不同的传感器拾取检测对象的数据,通过电子技术的控制和处理。在二次仪表上通过不同的的方式反映出产品所处的状态,利用此信息可以对零部件进行调整并靠近所设定最佳尺寸,从而构成一个完善的闭环系统。
北京奔驰生产线采用伯赛在线测量系统,机器人法兰盘安装测量传感器对车身尺寸进行测量。采用的测量传感器如图1所示。

图1
1.2 工业机器人系统原理与中心手构造
库卡机器人主要有机械系统、控制系统、示教器、系统软件及配套电缆等组成。如下图3所示,其中,机械系统为机器人本体部分,是机器人的支撑基础和执行机,包括基座、臂部、腕部;控制系统是机器人的大脑,是决定机器人功能和性能的主要因素,主要功能是根据作业指令程序以及从传感器反馈回来的信号,从而控制机器人在工作空间中的位置运动、姿态和轨迹规划、操作顺序及动作时间等;示教器是用于机器人的手动操作、程序编写、参数配置及监控的手持装置。

图2

图3
机械手是机器人机械系统的主体,KUKA机器人一般由6个活动的、相互连接在一起的关节(轴)组成。1轴到6轴构成完整的运动链,6个轴对应的标号分别为A1、A2、A3、A4、A5和A6,如图4所示,其中A1-A3轴为机器人的主轴,主要确定机器人末端在空间的位置,A4-A6轴是机器人的腕部轴,主要确定机器人末端在空间的姿态。各轴的运动通过伺服电机有针对性的调控而实现。这些伺服电机通过减速机与机械手的各部件相连。

图4
机器人足部即基座,为运动链的起点,是机器人的基础部分,起支撑作用;法兰盘即最后一个轴的机械接口,也是运动链的开放端,习惯上称为末端执行器,可以安装不同的机械操作装置,如抓手、吸盘等。机械零部件大致由底座、转盘、平衡配重、连接臂、臂、腕部轴组成。机械手零部件的爆炸图如下所示。
本课题主要研究机器人的中心手(腕部轴)、平衡缸(平衡配重)和伺服电机等部件的返修测试项目开发与应用。尤其针对中心手这种结构复杂运行精度要求高返修件的精度测量。目前,MRA焊装车间存在机器人中心手A6轴漏油现场,备件返修后没有可靠的测量平台,而且厂家维修单价过高。由于更换密封部件涉及到中心手解体重新装配问题,易造成运行精度与稳定性偏差。BBAC没有相应的机器人运行精度测量平台,直接制约了维修部门自行修理漏油这项工作。搭建库卡机器人运行精度测量平台,解决中心手部件无法进行精度测量的问题。

图5
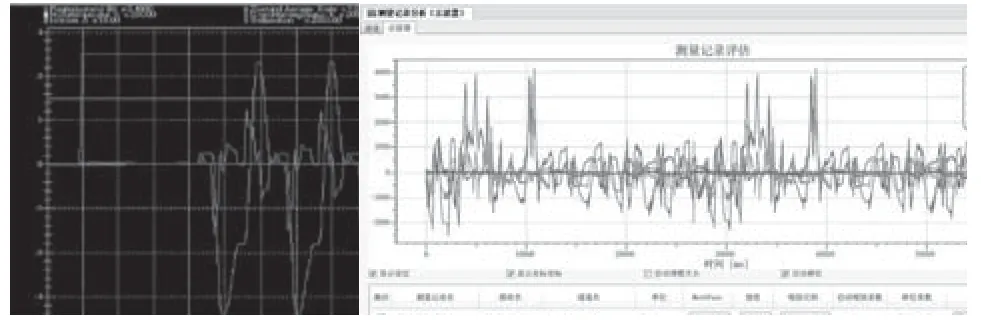
图6 机器人A1-A6轴扭矩参数监控
1.3 机器人各轴电机扭矩数据的采集与分析
利用KUKA WorkVisual Trace数据跟踪分析机器人运行状态。通过机器人侧配置Trace文件,将机器人运行过程中的A1-A6轴电机电流、扭矩、TCP位置、速度等参数进行采集。拟合生成波形,实现机器人真实运动参数分析。
数据采集的最短周期为4ms,完成能够满足实际分析要求,不会造成数据丢帧和不准确现象。
使用WorkVisual 测量记录分析(示波器)平台测试返修平衡缸、返修中心手。机器人自动运行时,记录各轴电机扭矩、电流、位置和加速度等运行参数,与标准模型进行比对,判断返修备件质量。
2 实施过程
2.1 机器人专用测量抓手制作与安装
机器人中心手精度测量校准抓手主要由2部分构成,黑色校准块在伯赛系统中负责边缘识别检测,绿色校准块负责圆孔识别检测。

图7

图8
2.2 伯赛测头安装与调试
测量系统包括伯赛测头、E-Bridge控制器和伯赛主机的安装与调试。
2.3 机器人自动运行模式配置
要实现机器人外部自动运行模式,主要在机器人和PLC两端分别进行设置。机器人侧配置相应的IO点号,如外部自动信号、机器人使能信号等。PLC侧添加新的硬件组态与安全复位程序,为机器人提供外部自动信号与安全确认信号等。
库卡机器人能使信号与自动信号配置。

图9
2.4 机器人与伯赛系统通信控制配置
机器人Ethernet KRL安装及相关端口设定。

图10
2.5 机器人测量轨迹调整及测量特征点标定

图11
2.6 返修中心手测试与数据分析报告
针对返修中心手测试,内容主要分为2部分:
(1)机器人运行精度测试,执行机器人重复精度测量程序,机器人抓手
上的测量块,以2个不同的姿态,在伯赛测头上进行测量。伯赛主机上查看这2个点位置分布趋势。通常机器人的重复定位精度为0.02mm。生成测量报告并填写返修测试单。
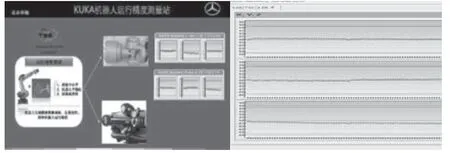
图12

图13
(2)机器人中心手A4-A6轴电机扭矩、电流,TCP位置等参数采集与分析。机器人运行测试程序过程中,采集生成Trace数据文件,将数据文件在WorkVisual的示波器中分析比对,确认返修中心手各种运行参数是否正常。主要参数如图15所示。

图14 机器人A4-A6轴电机电流参数
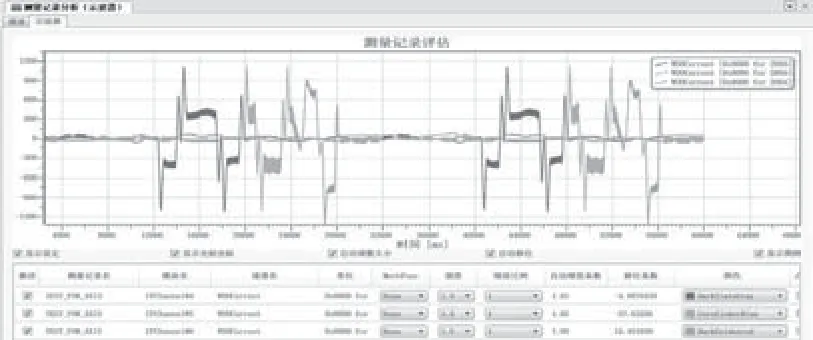
图15 机器人工具TCP位置参数(X/Y/Z)
公司内部现在没有针对机器人自身精度测量的工作站,现阶段返修备件在没有上线使用之前,没有线下测试工作。例如机器人中心手这种关键性部件,没有经过空载和带载测试以及运行精度与稳定性测量,直接应用到现场,将会造成机器人运动轨迹偏差、工具碰撞等严重问题。导致设备长时间停机。
机器人运行精度测量平台,能够提高维修人员的业务水平、减少停机时间。其他车间返修机械备件也可以到该平台进行测试。如果维修人员能够自行修理中心手并保证质量,也能为与厂家洽谈维保费用提供重要筹码。
