自动化集装箱码头单小车自动化岸桥与智能导引车协同装卸作业工艺
2022-11-01郑伟鸿
郑伟鸿,黄 争
(广州南沙联合集装箱码头有限公司,广东 广州 511466)
1 岸边装卸作业车道布置及IGV交通流
岸桥下设置6条智能导引车(Intelligent Guided Vehicle,IGV)车道,其中2、3、5为作业车道,1、4、6为通行车道,见图1。结合IGV行驶轨迹要求,IGV上下档通道(IGV上档即IGV从堆场经岸边通道进入岸边装卸作业车道,IGV下档即IGV在岸桥装卸作业车道完成作业后离开装卸作业位置经岸边通道驶离岸边)与岸桥之间需满足以下条件:


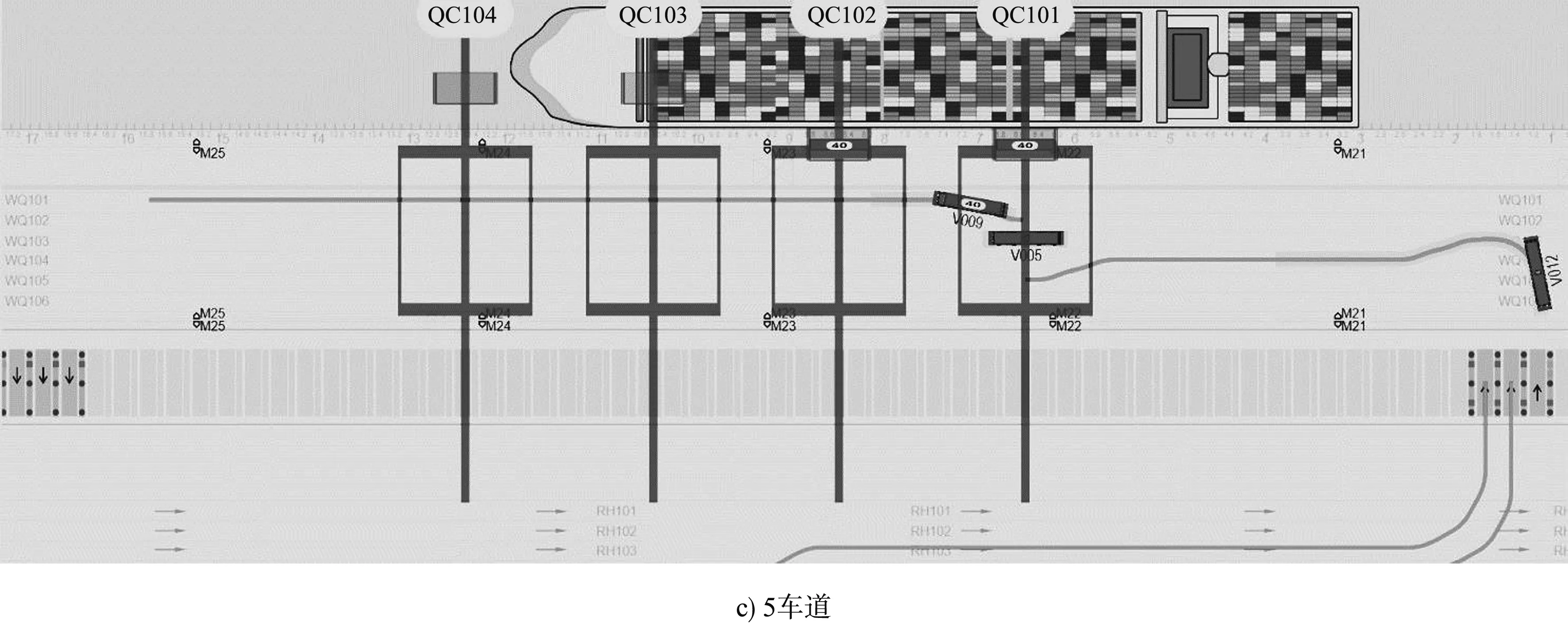
图1 IGV装卸作业车道
1)使用2、5车道作为作业车道时,上下档通道中心点与岸桥作业中心点距离需≥29 m。
2)同时使用2、3、5车道作为作业车道时,上下档通道中心点与岸桥作业中心点距离需≥40 m。
2 IGV上下档机制
2.1 岸边通道
通道区分进、出2种类型,在IGV上档作业时需要选择进岸桥通道进入,在IGV下档时需要选择出岸桥通道离开。为了确保IGV能精确选择就近的通道进入岸桥下,在班轮作业时,还需明确通道所属船舶,在班轮作业时,IGV只选择所属船舶的通道进出岸边;驳船通道无所属船舶,即IGV作业驳船时,所有驳船通道通用。
2.2 班轮缓冲位机制
已建成的自动化码头多为“双小车岸桥+AGV(自动导引车)桥后装卸作业+堆场端边装卸”[1],堆场与岸边之间有充足的位置可用于布置垂直于岸线的临时停车位置,垂直于岸线的临时停车位置更有利于AGV路径的规划,提高AGV作业效率[2]。但鉴于场地限制,有的自动化码头堆场与岸边之间无充足的位置,无法布置垂直于岸线的临时停车位置,对此,提出一种平行于岸线的临时停车位置,在班轮作业时启用,称为班轮缓冲位[3]。班轮缓冲位默认在横一路上,对应岸边通道处的缓冲位置默认关闭,班轮缓冲位置可与岸桥绑定,IGV在选择缓冲位置时会优先选择所属岸桥的班轮缓冲位,驳船作业无需使用班轮缓冲位。
2.3 岸边通道及班轮缓冲位被选中的相关决策机制
IGV在执行调度任务前往、离开岸桥时需要选择合适的通道,但是受限于班轮通道由IGV独占,以及岸桥申请处理往往伴随着岸桥车道分配,故需要对通道选择时机进行合理控制,尽可能减少资源的浪费[4]。
1)进岸桥通道选择时机应该是在收到任务时初步判断是否需要经过通道,并在满足路径更新、轨迹要求的条件下尽可能在距离岸桥通道较近处进行申请、选择。
①具有空闲通道时,IGV应该在预选通道(预选非占用,仅是车辆管理系统VMS内部生成路径的临时目标点,在确定选择通道或者绕行时将会内部释放)附近时申请通道;
②无空闲通道但具有缓存位置的IGV进岸桥应当在到达缓存位置申请;
③无缓存位置的IGV应在即将到达预选通道(预选非占用,仅是内部为生成路径的临时目标点,在确定选择通道或者绕行时将会内部释放)附近时申请通道,如申请不到则去就近的停车场等待或经最近的道路绕圈重新去预选通道。
2)出岸桥通道选择时机为:①班轮IGV运行到决策点附近后选择合适的通道;②驳船IGV在离开时即选择合适的通道;③无所属船在收到任务时即选择最近的通道。
3 IGV桥下作业位置判定及跟随机制
IGV桥下作业位置判定机制指当IGV接收到前沿作业任务后,如何判定桥下目标位置,即进入桥下作业车道后在何位置等待作业。IGV桥下跟随机制指当IGV作业岸桥状态发生变化(含岸桥物理位置变化、岸桥设备号变化),IGV需如何协同配合,即相当于当岸桥状态发生变化时,IGV如何更新并行驶至新的等待作业位置。该功能逻辑设计的2个基本原则:一是为保证整体作业效率,当IGV到达前沿后,如桥下有空余车位,要尽量保证IGV可驶入桥下;二是当IGV进入桥下后,需有合理的控制逻辑满足各类工况需求,即减少IGV频繁移动,减少IGV驶出桥下再重新进入的几率,提供方便可控、逻辑严谨的人工监控、调整功能。结合上述2个设计原则,提出3种设计思路。
3.1 船舶贝位、岸桥位置、IGV指令贝多重判定逻辑
岸桥在班轮执行装卸船任务时,大车对位后首先要选择当前位置对应的船舶贝位,系统会记录并存储船舶贝位所对应的物理位置信息,当岸桥大车移动超过一定距离(可视具体情况设定),系统会要求作业人员重新确定船舶贝位,并在人员选择确定后记录储存船舶贝位对应的贝位位置[5]。
3.1.1IGV桥下作业位置判定
IGV到达前沿指定位置后申请桥下作业车道,当IGV被允许进入桥下作业时,实时读取岸桥当前选择的贝位位置,以此作为进入桥下后的停车位置。
3.1.2IGV跟随机制
1)岸桥贝位位置变化。当IGV确定等待作业位置后(运动中或已停车),如岸桥贝位位置变化,则判定IGV指令贝位与岸桥新确定的船舶贝位信息是否一致,如一致则IGV以岸桥当前贝位位置更新等待作业位置,如不一致则IGV仍在之前位置停车等待。特殊情况下会出现IGV指令贝位与岸桥新确定的船舶贝位信息一致,但岸桥当前无空闲车道,此时IGV无法规划至新位置的行车路径,需在原位置等待,待车道空闲后再行车(可与IGV超时报警机制结合,对IGV等待超过一定时间的情况给予报警提示,同时在调度逻辑中应考虑该情况下IGV优先获取车道)。
2)作业岸桥发生变化。当IGV任务的执行岸桥发生变化,先判定IGV指令贝位与当前所在船舶贝位是否一致,如一致,则IGV继续在原位置等待;如不一致,再判定IGV指令贝位与新岸桥船舶贝位是否一致,一致则IGV以岸桥贝位位置更新等待作业位置,规划路径行驶(路径规划失败处理与上文相同),不一致则继续在原位置等待,显示异常等待人工处理。
3.2 匹配船舶贝位位置
在作业过程中,系统会记录船舶各贝位所对应的物理位置。“匹配船舶贝位位置”指当IGV申请桥下等待位置时,以携带指令贝位信息寻找对应的船舶贝位位置,无需考虑该贝位是否有岸桥及处于何种状态,只要系统中有存储船舶贝位位置,且位置上具备停车等待条件,即可以该位置作为目标位置规划路径驶入,后续如IGV携带指令贝位发生变化,则重新按照该逻辑寻找新的等待作业位置。在具体功能逻辑处理时,需注意以下细节:
1)岸桥进行船舶贝位选择时,需操作便捷,对于距离异常的需有验证机制,要求重新确认(例如对于两个相邻贝位间距小于12 m)。
2)考虑可能存在船舶漂移的情况,系统中可以对记录的贝位位置进行人工修正/删除或逻辑调整。
3)IGV在申请桥下等待位置时,除判定系统中是否有贝位位置记录,还需判定贝位位置是否满足IGV进入的行驶条件,例如相邻贝位的同一作业车道同时只能停1台IGV。
4)当岸桥同时存在2个及以上贝的卸船任务时,调度系统在分配IGV时会考虑卸船队列的优先顺序,但不排除会出现因特殊原因导致执行下一个作业贝位的IGV后车先到,并对相邻贝位的可使用作业车道产生影响,因此在调度系统计算时需考虑如何保证IGV指令分配的合理性,或考虑在IGV申请桥下作业位置时对IGV任务进行二次优化分配。
3.3 匹配岸桥位置
3.3.1IGV桥下作业位置判定
增加岸桥确认大车到位的功能,岸桥每次移动大车超过0.5 m需确认到位,则此时系统记录下岸桥当前位置作为该岸桥IGV桥下作业位置,当岸桥移动大车未重新确认到位时,则IGV仍然以上一个确认过的位置作为桥下作业位置。系统层面还需考虑以下2点:
1)IGV申请桥下作业位置时,系统先判定当前岸桥是否有车道空闲,即通过当前岸桥可使用车道数(2/3/5或者2/5)及车道上是否有等待IGV判定,如某一车道上当前岸桥的IGV数量为0,才允许IGV进行申请。
2)在班轮作业时,如岸桥进行自动化作业,还需在移动大车后确认所在贝位,理论上确认贝位也具有该功能,但是对于驳船或其它非装卸船任务,是无法确认贝位的,故须确认大车到位。
3.3.2IGV桥下跟随机制
由司机人工选择确认IGV是否跟随,即给司机提供一个“跟随”的功能键,司机可对已经申请车道成功的IGV(单选或多选)进行选择,选择后点击“跟随”,系统层面则触发以下逻辑:
1)对于IGV当前申请的桥下作业位置与岸桥当前确认位置一致的不起任何作用。
2)对于IGV当前申请的桥下作业位置与岸桥当前确认位置不一致的,且IGV可规划路径行驶至新的确认位置的,变更IGV当前申请的桥下作业位置。
3)对于IGV当前申请的桥下作业位置与岸桥当前确认位置不一致的,且IGV当前情况下不可规划路径行驶至新的确认位置(目标位置有物理障碍或行驶至目标位置的路径上有物理障碍),该IGV对岸桥的车道进行预占,不允许其它IGV再申请该岸桥的对应车道(同时有多台IGV预占1个车道的,确定为距离最近的预占)。此时前台给出异常提示:“XXX号IGV已设定延迟跟随;XXX号IGV无法跟随,也无法延迟跟随”。对于延迟跟随的IGV在界面上有标记显示供人员查看,如满足IGV路径到达条件后,IGV则自动向目标位行驶,同时“跟随标记”消除。在IGV处于“延迟跟随”状态时,可人工选择“取消跟随”按键,则此时IGV取消对已经跟随的相应车道的预占。
3.3.3其他注意事项
1)IGV层面无法规划至目标位置路径须报异常信息。
2)对班轮装船任务,如岸桥确认贝位与IGV指令贝位不一致,则不能将IGV指令发送至ECS执行。
以上述2个基本原则为主要评价标准,对3种设计方案进行比较:
方案1:“船舶贝位、岸桥位置位、IGV指令贝多重判定逻辑”方案,优点为IGV容易获得桥下作业等待位置,缺点是IGV进入桥下后再次调整作业等待位置的频率较高,尤其在岸桥大规模移贝作业时(例如顶桥)时可能会导致IGV大规模调整。
方案2:“匹配船舶贝位位置”方案,优点为IGV确定的桥下作业等待位置精准,在不发生指令贝位变化的情况下,多数情况下IGV进入桥下后不需二次调整位置,缺点是以船舶贝位位置的确定作为IGV进入桥下的必要条件,限制性较高。
方案3:“匹配岸桥位置”方案,结合了前两个方案的优点,解决了“传统卸船”模式下及IGV执行岸边非装卸业务时,只有作业岸桥的信息,无任务船舶贝位信息,即类似于驳船作业的工况,也有利于避免班轮作业中岸桥移贝顶桥时桥下交通流混乱的情况。
4 结论
1)为了实现单小车自动化岸桥与IGV的协同作业,需打破传统集装箱码头单条装卸作业车道排队的机制,采取2、3、5并行排队机制。
2)为了适应IGV的作业特点以及满足班轮作业的需要,引入岸边通道及班轮缓冲位置机制,以解决岸边交通拥堵、IGV进岸桥决策时间等问题。
3)通过方案比较,“匹配岸桥位置”的机制更能适应“单小车自动化岸桥+IGV桥底装卸+堆场水平布置侧面装卸”的作业模式。
