基于有限元方法的零重力按摩椅椅架结构设计
2022-10-25潘宏杰平忠源陈国华罗正义
郑 清 潘宏杰 平忠源 陈国华 罗正义
(奥佳华智能健康科技集团股份有限公司福建省智能健康按摩器具重点实验室 厦门 361100)
引言
按摩椅是采用电能驱动,依靠机械、气袋、电磁和电热等作用对人体部位进行按摩,具备揉捏、捶击、拍打和摇摆等动作,对缓解人体疲劳具有一定效果的座椅[1]。随着亚健康人群的增长,以及生活节奏的加快,居家便能放松按摩的按摩椅逐渐受到群众喜爱,同时对按摩椅按摩功能也提出了更高的要求[2-4]。零重力按摩椅是依据航空航天中宇航员的失重感进行设计,能使人处于最放松状态,从而实现按摩效果最佳的一种功能按摩椅[5]。按摩椅的失重感是通过椅架结构调整人体静躺角度实现,因此,按摩椅椅架的精细化设计与验证对于提升按摩体验至关重要。同时,为保证按摩椅使用过程中的安全性和稳定性,需对按摩椅椅架结构强度和刚度进行校核。
当前大多数按摩椅制造企业对按摩椅椅架结构的设计流程依旧传统,主要包含三维设计、样机制样、样机测试,再优化、再制样、再测试,直至椅架功能、强度和刚度满足需求为止。如此低效的研发流程,极大地提高了成本的投入,难以保证按摩椅椅架的设计周期。为提升结构设计的可靠性,减少制样与测试的次数,缩短研发周期,可利用有限元方法对按摩椅椅架结构强度进行分析,根据分析结果,提前获知椅架结构薄弱处,并进行优化设计,直至仿真结果可行,再制样。有限元分析方法是利用数学中近似的方法对真实的物理系统进行模拟,是可分析结构强度的实用高效的数值分析方法[6,7]。本文结合有限元分析方法对椅架结构强度的薄弱处进行分析,并组装样机进行试验验证,通过理论分析与试验结果对比,验证了有限元分析方法的有效性,为按摩椅椅架结构优化再设计奠定了基础。
1 按摩椅椅架结构设计
人体工程学中指出,零重力状态时,人体上半身与大腿之间的夹角为(126±7)°,同时大腿与水平地面之间的夹角为(35±5)°[8]。按摩椅椅架包含背架、座架和小腿总成三个组件,为保证人坐在按摩椅上时,能精准控制各部位之间的角度,需要对其分别进行设计,利用传动机构构建各组件的协同联动,从而实现零重力功能。
按摩椅背架是承载人体头部、背部和臀部的重要部件,为提升躺姿及按摩舒适性,结合人体工程学,设计背架的支撑面形状为贴合人体背部曲线的S型。同时为保证人体上半身与大腿之间的角度,背部支撑面与大腿支撑面之间的夹角设计为126 °,两支撑面之间的过渡设计参考了人体臀部弧线。为实现背架与座架、小腿总成的联动,背架两侧还包含滚轮结构,底部和背架末端设计了耳座。
按摩椅座架承载着按摩椅的所有负重,是按摩椅椅架的底座。其上有适配背架滚轮的导轨和安装推杆的耳座结构。导轨倾斜的角度、耳座的位置和推杆行程的设计紧密联系,构成双滑块机构。通过推杆(螺旋传动)提供线性推力,从而实现背架与座架之间的相对运动。在推杆运动至最大行程时,背架的大腿处支撑面与地面的角度为35 °,实现了零重力按摩椅椅架的参数设计。同时依靠螺旋传动的自锁性能,使得椅架处于稳定状态。
按摩椅小腿总成是按摩和支撑小腿的关键部件。当按摩椅在工作时,人体上半身及大腿随着按摩椅椅架角度的变化而变化,此时小腿应随着大腿处的位姿变化而进行抬升,以保证被按摩者以舒适的状态进行按摩,设计小腿处的支撑结构如图2(c)所示。小腿总成上端耳座与背架末端的耳座通过销轴进行连接,背面支撑件表面通过滚轮、钣金件和推杆与背架进行连接。小腿总成可以与背架进行联动,从而实现角度的调整。
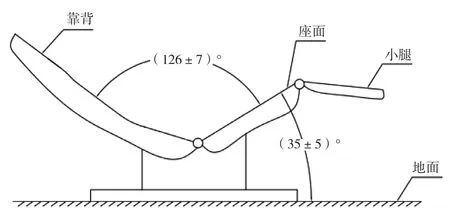
图1 零重力按摩椅示意图

图2 按摩椅椅架结构
2 按摩椅受力分析
2.1 按摩椅承重分析
当人体静躺在按摩椅上时,人体头部、背部、臀部、大腿和小腿与按摩椅的背架组件和小腿组件的上表面紧密贴合。由于地球引力的作用,人体重力均布在按摩椅上。由于人的重量、身高差异较大,难以对分布在按摩椅背架和小腿上表面的作用力进行准确计算。且用户躺在按摩椅上时,可能出现外界扰动、小范围移动,或小孩在其上玩耍跳动等,使得按摩椅受力情况更加复杂。因此在设计初始时,应考虑极端或特殊工作情况下,椅架强度和刚度的可行性。
根据国家标准GB/T 26182-2010可知,可通过静压测试、冲击测试模仿按摩椅极端工作情况和特殊工况。静压测试是将一定质量的试样,分别置于按摩椅的背部、座部和小腿部,静置一段时间后,卸载观察其结构的损坏和变形程度,进而判断按摩椅强度和刚度的可行性。冲击测试是分别在按摩椅座部和小腿上方,距离各部位上表面一定高度,将对应质量的试样做自由落体运动跌落至按摩椅上。根据冲击后各部位的变形量及结构损坏程度对其强度和刚度可行性进行评判。同时为保证机械结构设计具有一定的安全系数,设置静压和冲击时的载荷及可行性评判标准如表1所示。

表1 按摩椅椅架静压、冲击测试载荷及可行性评判标准
2.2 按摩椅受载计算
根据3.1节中对各工况下各部位的承重进行分析后,需进一步对按摩椅各部位承受的载荷进行计算。模拟按摩椅的工况主要包含静压和冲击两种测试。在静压测试时,具有一定质量的试样是静置在按摩椅上,因此作用在按摩椅表面的载荷为试样的重力,方向垂直地面竖直向下。
在进行冲击测试时,试样是由距离按摩椅各部位上表面一定距离做自由落体运动,跌落至按摩椅上。试样与按摩椅之间的冲击过程十分复杂,且冲击力远远大于试样的重力,为求解冲击力,首先可采用能量法进行粗略计算。根据物理学中的自由落体运动和动量定理进行简化求解,可知冲击力与缓冲时间的关系如下[9,10]:

式中:
Fmax—最大冲击力,单位N;
M—跌落物体重量,单位kg;
g—重力加速度,单位m/s2;
h—跌落高度,单位m;
τ—缓冲时间,单位s。
由于在冲击过程中,跌落试样与按摩椅在缓冲时间内的作用力是随时间的变化而变化的,为进一步求解冲击力随时间的变化曲线,根据查阅文献[7]可知,冲击缓冲过程中的冲击力变化曲线可用正弦波表示。因此建立冲击力在缓冲过程中随时间变化的函数模型如下:

式中:
F—冲击力,单位N;
t—时间,单位s。
根据上述冲击力随时间变化的函数可知,需进一步对缓冲时间进行分析。由于在按摩椅背部、座部和腿部的上表面均会覆盖海绵和皮料,用以保证用户的舒适度,以及外表的美观性,因此在冲击过程中,按摩椅表面的材质均会影响缓冲的时长,由于缓冲过程的复杂性,难以用理论计算,因此需采用实验进行测量。
搭建实验平台如图3所示。依次将按摩椅座部、腿部置于冲击测试的设备下,将高速摄像机置于旁侧。在跌落过程中,高速摄像机对跌落过程进行拍摄,通过拍摄画面的帧数进而得到缓冲时间。根据实验结果可知,各部位的缓冲时间均为0.2 s。缓冲时间接近,是因为在按摩椅上表面所用的海绵和皮料材质均相同,与实际相符。

图3 冲击缓冲时间测试实验平台
3 按摩椅椅架有限元仿真
3.1 有限元建模
有限元分析方法是借助于数学和力学知识,利用计算机技术解决工程技术问题的有效工具,能有效地辅助结构设计和优化,因此得到广大工程人员的青睐[3]。由于按摩椅椅架结构复杂性,用有限元分析工具进行建模耗时久,因此本仿真采用模型导入的方式,建立有限元模型。
3.2 静压有限元分析
3.2.1 背部静压有限元分析
为节省计算时间,在背架静压仿真时仅导入背架结构模型。在导入模型后,首先对模型材料进行设置,设置背架的钢材料性能参数如表2所示。接着采用四面体单元对模型进行网格划分。然后对仿真环境进行搭建,设置背架与座部连接处为固定约束,同时限制背架推杆耳座处的位移为0。设置负载作用在背架上表面,方向竖直向下,以及按摩椅小腿作用在背部销轴处的重力,以及背架自身的重力,如图4所示。最后采用静态模块进行静压分析,得到背架的应力、位移分布如图5所示。根据分析结果可知,背架的最大应力为138.86 MPa,最大变形位移为1.59 mm,与其屈服强度相比,此时未进入塑性变形阶段,因此可认为该椅架的强度和刚度满足设计标准要求。其中最大位移在背架的最上端,这是因为背架最上端相对于约束位置力臂最长,因而变形位移最大,与实际相符。
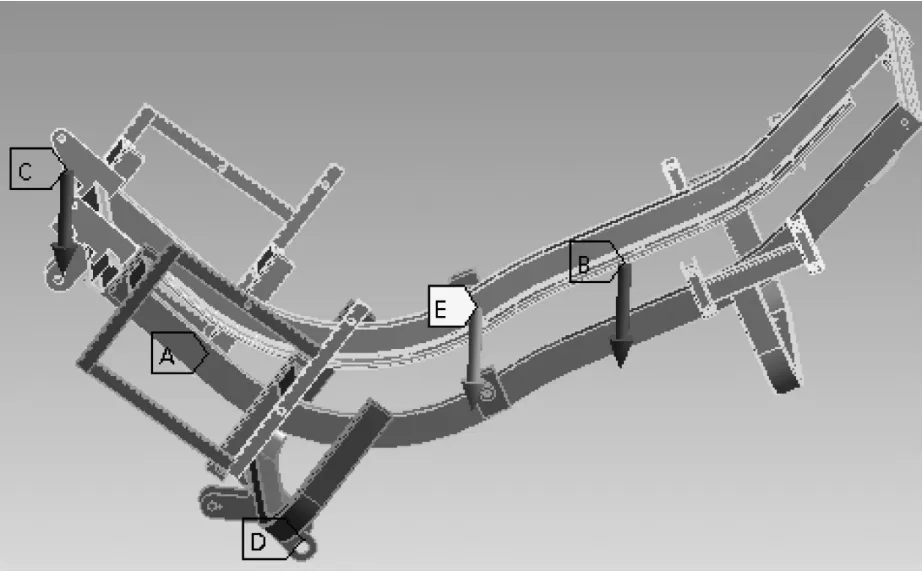
图4 背部静压载荷与约束
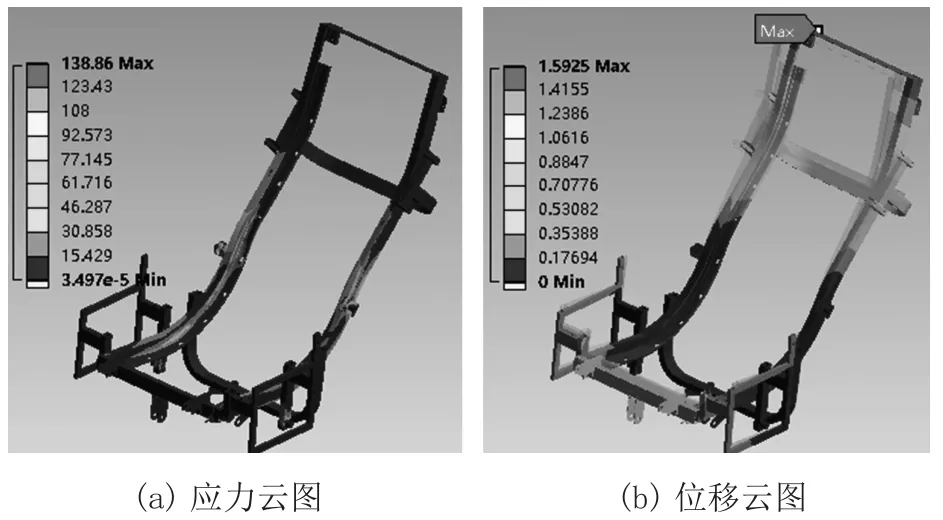
图5 背部静压有限元结果云图

表2 材料性能参数
3.2.2 座部静压有限元分析
根据座部静压的要求,导入模型如图6所示,其中包含3个部件,分别是按摩椅背架、座架和连接处的滚轮。设置按摩椅背架和座架的材料为钢材料,设置滚轮的材料为POM,其材料性能参数如表2所示。采用四面体单元进行网格划分,并设置滚轮与座架导轨内表面的接触关系为不分离。将座部静压载荷加载到背架座部表面,按摩椅小腿重量加载到背架销轴处,设置背架和座架自身的重力,方向竖直向下。启动静态仿真模块,得到座部静压的应力和位移云图如图7所示。由图7(a)所示的应力云图可知,最大应力为131.72 MPa,由图7(b)所示的位移云图可知,最大变形位移为1.94 mm,与其屈服强度相比,此时未进入塑性变形阶段,因此可认为该椅架的强度和刚度满足设计标准要求。

图6 座部静压载荷与约束
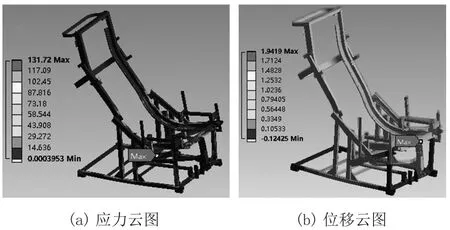
图7 座部静压有限元结果云图
3.2.3 腿部静压有限元分析
由于腿部结构复杂,对腿部结构进行适当简化,仅考虑小腿承载部分的结构,腿部结构模型如图8所示。设置腿部结构材料为钢材料。采用四面体网格进行划分。根据小腿与背架的连接结构处的特点,设置背架耳座与背架末端管件连接处为固定约束,设置小腿背面支架被支撑处为固定约束,将腿部静压的载荷施加在小腿承载面,同时设置小腿自身的重量,方向均竖直向下。根据仿真软件计算结果得到应力和位移云图如图9所示。根据分析结果可知,最大应力为205.73 MPa,变形位移为1.24 mm,与其屈服强度相比,此时未进入塑性变形阶段,因此可认为该椅架的强度和刚度满足设计标准要求。其中最大位移在小腿的末端,这是因为小腿末端相对于约束位置力臂最长,因而变形位移最大,与实际相符。

图8 小腿静压载荷与约束

图9 小腿静压有限元结果云图
3.2.4 冲击有限元分析
利用有限元分析工具中的瞬态分析模块分析椅架在冲击过程中,随时间变化的载荷作用下,系统的瞬态响应特性。与静态分析过程中的设置不同的是,冲击过程的载荷是随时间变化的函数。基于3.2节中冲击力数学模型的研究,设置按摩椅座部和腿部冲击时的载荷曲线图如图10所示。
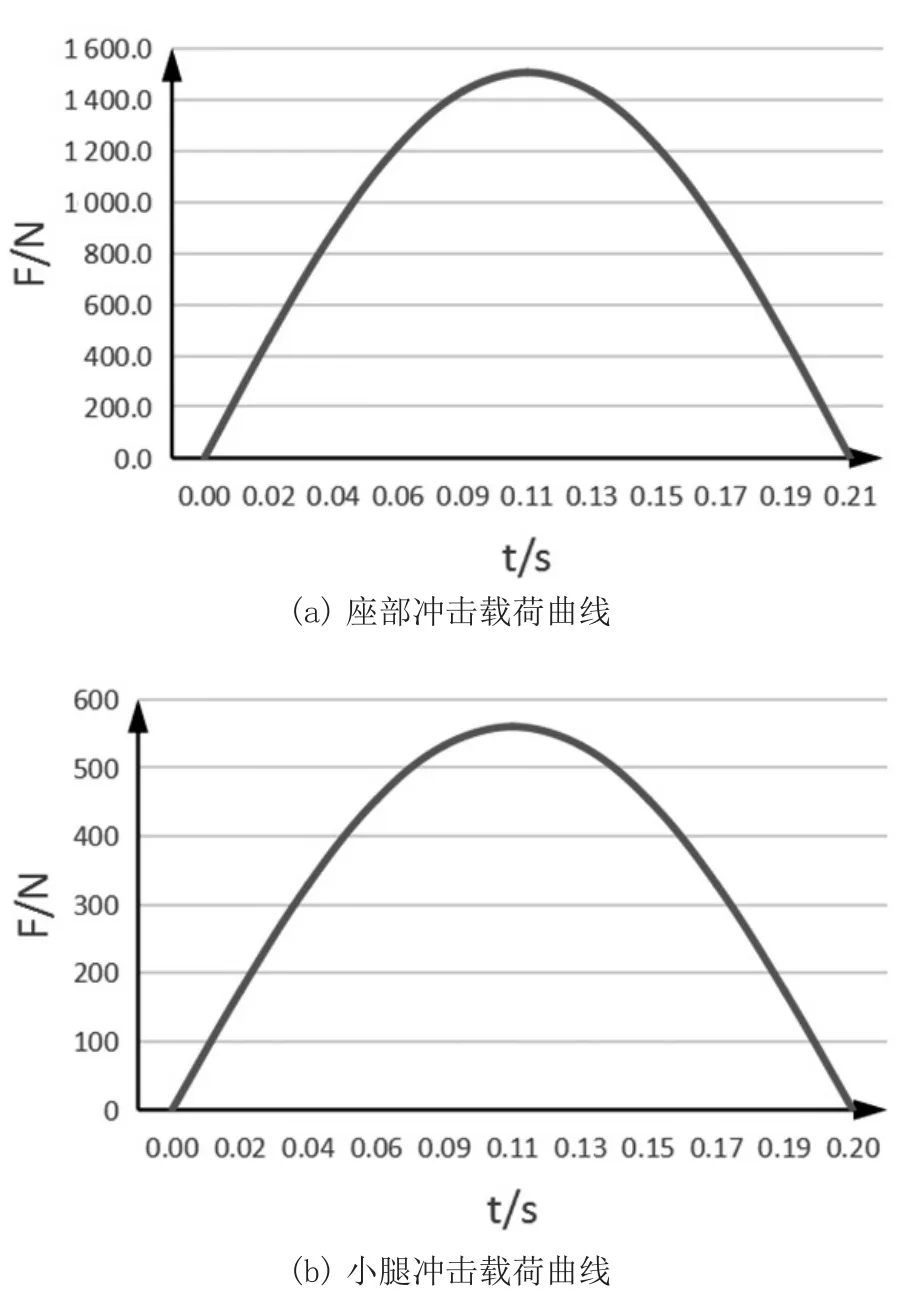
图10 冲击载荷曲线
根据瞬态动力学分析结果,得到各部位冲击时的应力和变形云图如图11所示。由图11(a)可知,座架冲击时的最大应力为233.27 MPa,图11(b)可知,最大变形为2.77 mm,与钢材料的屈服极限对比,安全系数为1.93。由图11(c)可知,小腿冲击时的最大应力为314 MPa,图11(d)可知,最大变形为3.89 mm,与钢材料的屈服极限对比,安全系数为1.43。由于冲击时的测试载荷已经考虑了一定的安全系数,因此此处安全系数并不等同于设计安全系数,设计安全系数应该为测试载荷的安全系数与此处安全系数的乘积。由上述可知,在由测试载荷计算而来的冲击力作用下,得到椅架强度的安全系数均在1.4以上,因此可认为该椅架强度和刚度满足标准中设计需求。
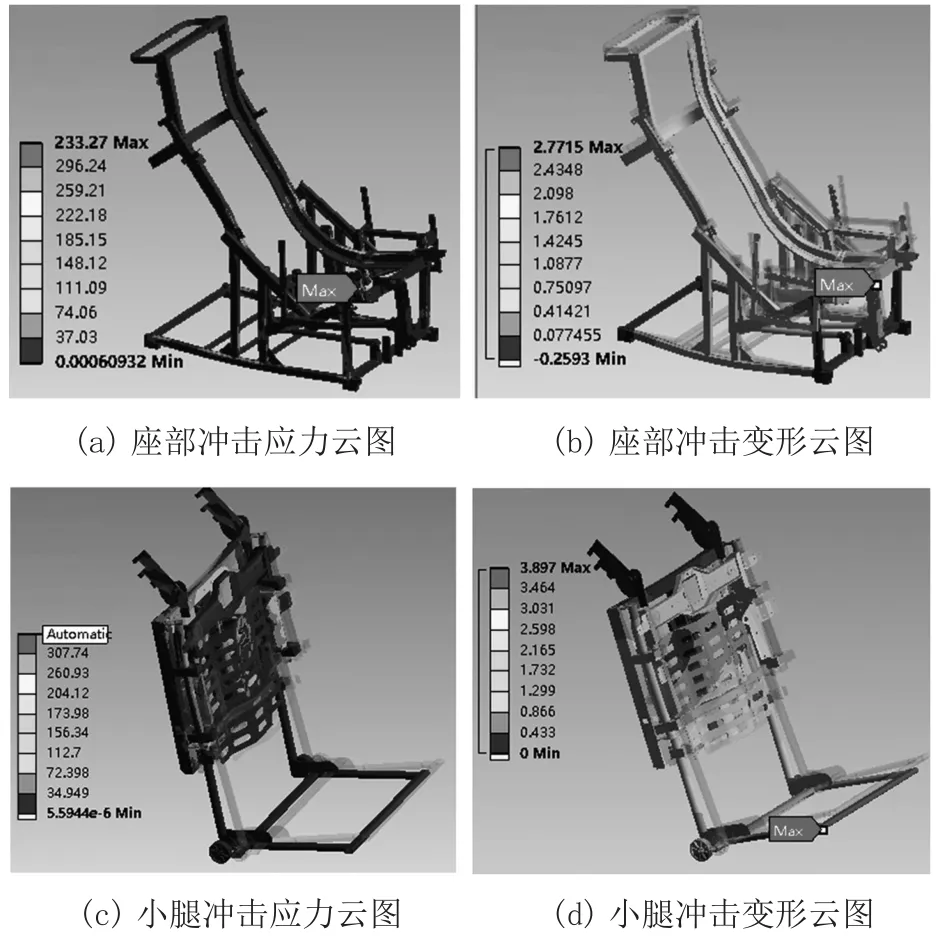
图11 冲击仿真有限元分析
4 样机试验
4.1 静压测试
为进一步验证椅架结构强度和刚度的可行性,搭建椅架静压和冲击试验平台,进行试验验证。按摩椅静压装置如图12所示。其中在做背部和腿部静压时,为防止按摩椅在测试载荷作用下,因力不平衡导致翻到,伤害到测试人员,为此在测试时,在按摩椅扶手处施加一定的载荷,以保持按摩椅在测试中的平衡。

图12 按摩椅椅架静压测试
在测试完成之后,对施加在按摩椅的测试载荷依次卸载,依照国家标准中的要求,分别对测试部位的功能、结构和外观进行检查。根据检查结果可知,在背部、座部和小腿静压测试之后,各部位功能运行正常,并无功能的异常;各部位外观无明显变形,无结构损坏,与仿真结果一致,验证了椅架强度和刚度的可行性。
4.2 冲击测试
结合表1中的冲击载荷和高度,依次对按摩椅座部和小腿进行冲击测试。在测试完成之后,根据国家标准GB/T 26182-2010,对各部位进行检查。通过对椅架功能、结构进行检查,无结构明显变形、损坏和松动,验证了该椅架的强度和刚度可行,跟仿真中的结果一致,也进一步验证了仿真方法的可行性,为使用有限元方法分析椅架强度和刚度奠定了基础。
5 结论
本文设计了一款零重力按摩椅椅架,并结合有限元分析方法对椅架结构强度和刚度进行分析,通过试验,验证了分析方法的正确性,以及椅架强度和刚度的可行性。主要完成以下内容:
1)结合零重力按摩椅的运动特点,完成了按摩椅架的结构设计;
2)结合按摩人体动力学,对按摩椅工况进行分析,并结合静压和冲击两种模拟工况下,作用在按摩椅上的载荷进行计算。同时为准确计算椅架在冲击时所受载荷,通过实验辨识缓冲时间,结合能量法建立了冲击力的力学模型;
3)结合有限元分析方法,分析了按摩椅强度和刚度的可行性,并结合实验进一步验证,试验结果表明椅架强度和刚度满足要求,同时也验证了有限元分析方法的有效性。