浅谈大型机器人演绎装置
2022-10-21邱双武
邱双武
(东莞市环宇文化科技有限公司,广东 东莞 523000)
引言
近年国内演绎事业蓬勃发展,新业态、新演绎层出不穷。国家提倡夜经济发展,户外演出和夜游演出越来越受欢迎,常规的演出装置及舞美效果已满足不了观众对视觉和体验感的追求。为了追求不一样的视觉和体验效果,我司特打造一款蒸汽朋克时代的重型机器人装置。其硬朗的外形,充满力量感,蒸汽朋克式的造型,营造出蒸汽工业时代的强烈氛围。
1 机器人的主要构成
1.1 机器人介绍
机器人总重量约200 t,高度20 m,手臂展开后宽度40 m,脚步行走轮组跨距11 m。机器人身上有多个表演平台,身上安装有风特效、雾森特效、火特效、烟特效及烟花特效等。
1.2 机器人结构
机器人总体结构设计分成五部分。腰身以下钢结构、腰身以上钢结构、头部钢结构、手臂钢结构、行走轮机构等。
1.2.1 机器人腰身以下结构 采用优质合金钢Q355B型材焊接。总体框架固定在底部行走轮机构上,结构采用龙门框架式结构[2-3]。连接方式采用高强螺栓连接固定。设计采用3D 建模,有限元分析,优化和验算结构在不同工况下的稳定性等[1]。腰身以下结构底部两边吊挂储车库和电柜房,车库门采用后拉式结构,驱动方式采用三相电机和链条,控制方式采用变频控制。
1.2.2 腰身以上结构 结构设计同样采用优质合金钢Q355B型材焊接。结构形式采用框架式结构[2-3],通过3D建模和有限元分析[1],简化了结构模型,提高了结构稳定性,减轻了材料重量。用有限元重点分析了手臂旋转固定底座的结构强度及各种工况下结构变形情况,确保了结构的稳定。
1.2.3 头部钢结构 采用弧形框架结构焊接,旋转方式采用电机驱动回转支撑传动。头部结构外侧舞美包装采用玻璃钢材料,头部可以旋转0°~360°,眼睛可发光,鼻孔可以喷烟等。
1.2.4 手臂钢结构 一级手臂采用优质合金钢Q355B,手臂尾部和腰身结构连接处受力最大,需要对此处进行强度和屈曲校核[1]。一级手臂翻转角度0°~20°,翻转方式采用油缸,控制采用伺服液压系统控制。二级臂采用铝合金6063-T6 焊接制作,重量轻,二级臂固定在一级臂上,二级臂身上包装采用镀锌板封装,运动部位的封板采用薄铝板。二级臂翻转角度0°~90°,翻转方式采用油缸,控制采用伺服液压系统控制。二级臂外侧安装有旋转锯盘,锯盘骨架结构采用铝合金管材焊接,外侧封板采用铝合金和EVA 材料。锯盘的驱动方式采用液压马达驱动锯盘齿轮无限旋转。
脚底分为上场门和下场门,每个场门右分为储车库和电柜房。储车库可以停放演绎用车辆,电柜房摆放机器人电箱和特效设备电箱,上场门电箱负责给腰身以下设备提供电力,下场门电箱负责给上场门设备提供电力。
手臂翻转液压油站,火特效燃料箱等安装在腰身以上机构的二层平台上。靠近上场门液压站负责控制上场门机械手臂,靠近下场门液压站控制下场门机械手臂。火特效燃料箱负责腰身以上喷火设备的控制。
1.2.5 机器人行走机构 机器人总体可以前后移动,行走在两条重型轨道上,行走轮轨道采用两条平行的QU70 钢轨,单根钢轨总长度约25 m,两根轨道中心跨度11 m。考虑机器人结构自重和载荷较大,行走距离长,单个轮子承载力大,为了行走时确保每个轮子受力均匀,特将行走轮结构形式采用平衡桥结构进行设计,确保每个行走轮都能很好的接触轨道面,能很好的承受荷载。单边合计8 套行走轮,长度约9 m,安装2 套动力驱动轮,6 套行走惰性轮,两边合共计16 套轮组,其中有4套驱动动轮系统。驱动电机采用三相异步变频电机,电机参数为:AC380 V 15 KW,单制动电机,每套电机尾部安装有编码器。四套电机通过变频器同步驱动。行走系统的设计和安装进度要求高,行走轮组的8 个轮子要在一个平面内,平面度误差2 mm/8 m,平衡桥刚性形变不大于跨度的1/1 000。平衡桥结构采用Solidworks2016建模,采用有限元分析结构的强度和挠度[1]。平衡桥采用先进的CNC 加工安装面,整套行走轮组系统在工厂加工、安装、调试达到设计要求后,整体包装发送现场拼装。轨道安装测量运用水准仪和专用管道间距检具测量,轨道面高差2 mm/10 m。轨道两侧做成活动盖板,便于轨道调整和检修。平衡桥结构设计见图1。
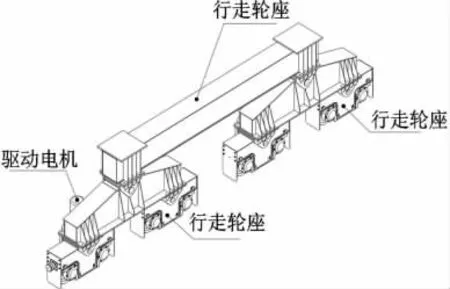
图1 行走系统平衡桥结构
1.3 机器人腰身以上动力系统
腰身以上旋转机构传动系统采用大型回转支撑和三相异步电机驱动,大型回转支撑直径2 500 mm,外齿轮。回转支撑底部固定在腰身以下机构底座上,上部固定在腰身上部钢架底座上。回转支撑以上部分可以选择,电机不随上部结构旋转,电机采用三相异步电机AC380 V 15 KW,单制动,减速器采用工业级行星减速,电机尾部安装有旋转编码器,电机控制采用变频调速控制。
1.4 机器人手臂动力系统
机器人手臂分成一级臂和二级臂,手臂展开后根部弯矩受力最大,一级臂根部结构受力较大,设计和制造上采用Q355B 合金钢材焊接,通过3D 建模和有限元分析,确定根部最有利的结构形式[1]。二级臂受力较小,主要受力为自身重量和锯盘重量,结构设计上采用轻型铝合金型材6063-T6 焊接,锯盘也采用6063-T6 焊接,手臂包装材料为EVA 和薄铝板,锯盘盘面采用铝皮,锯齿采用轻量化EVA组合。
一级手臂旋转采用大型回转支撑和三相异步电机驱动,电机采用变频调速控制。翻转采用伺服控制的液压油缸,翻转角度0°~20°。
二级手臂翻转采用伺服控制的液压油缸,翻转角度0-180 度。锯盘采用液压马达驱动,转速7 r/min,无限旋转。手臂的结构设计图见图2。
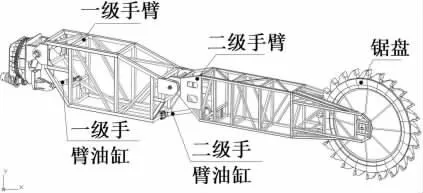
图2 机器手臂结构
1.5 机器人装置区域分布
机器人主体钢结构采用合金钢型材Q355B 焊接,腰部以下结构采用龙门框架式结构。龙门框架固定在行走机构的平衡桥横梁上。储车库和电柜房挂在龙门框架底部,腰身以上钢结构直接固定在腰部回转支撑上表面。腰身平台一层为设备安装层,液压站和喷火主机柜等都布置在该平台。腰身平台二层留有多个表演用的空间平台,腰身上部钢结构正面和背面都留有步梯和爬梯,各个平台具有联通。机器人头部固定在腰身机构顶端,头部可以0°~180°旋转,机器人的眼睛可以发出红色的光,鼻孔可以喷烟。机器人结构图见图3,机器人效果图见图4。
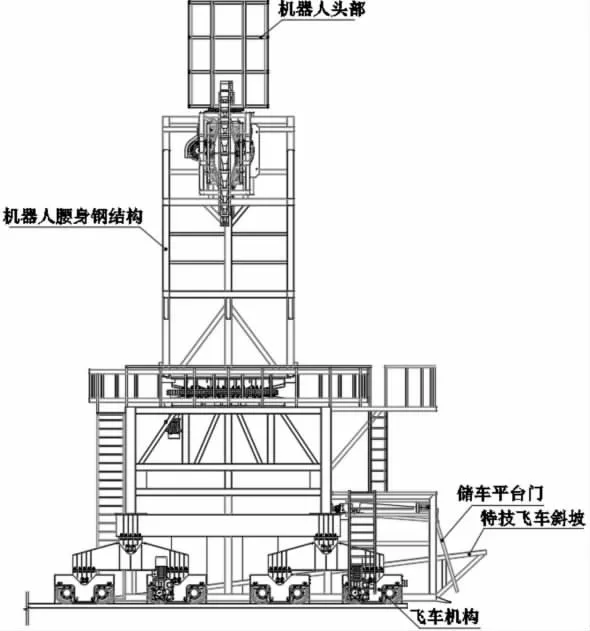
图3 机器人结构

图4 机器人效果
2 机器人电气控制系统的构成
2.1 机器人装置行走供电方式
采用特殊定制自动卷线器同时传输强电信号和弱电信号。行走驱动采用4 套三相异步电机,驱动控制采用现场总线控制方式,电机采用变频调试控制。电机同步性采用跟随和同步控制,确保电机同步性,电机行程和位置精准度通过电机尾部编码器实时测量、比较,调整,保证4 套驱动电机的一致性和同步性[5-7]。
2.2 腰部动力系统
腰部旋转驱动系统和头部旋转驱动系统采用三相异步电机,变频调速控制。位置和角度测量通过旋转编码器和行程限位开关检测。
2.3 手臂控制系统参数
一级手臂翻转0~20°,采用伺服液压站,通过恒压力,变流量控制调节液压油缸伸缩速度。二级手臂翻转0~90°,采用伺服液压站,通过恒压力,变流量控制调节液压油缸伸缩速度。液压站油路块内置压力传感器,单向阀和防爆阀等安全措施,电机采用伺服控制,启动和停止平稳,无抖动。
2.4 门控制方式
储车库开合门,采用电机和链轮驱动系统,门的开合方式为后拉滑动式,门打开后,翻转90°,门位于车库顶部。导向机构采用滚轮直线导轨,精度高,无间隙,运行无噪声。控制电机采用变频调速控制,启动和停止平稳,无振动。
2.5 胸部开合门系统
胸部开合门采用推拉式结构,传动方式采用齿轮和齿条啮合,驱动电机固定在钢架上,齿条和门框架固定在一起,齿条随门一起左右移动。
2.6 安全保障措施
安全措施保障,机器人行走、腰部旋转、头部旋转、手臂旋转、手臂翻转等均设内部软限位,演出位置限位及极限限位,机械硬限位等。机器人动作和周边配套设备相互互锁,确保机器人运行安全。急停开关设计位于控制室、机器人身上平台,机器人脚底电气控制柜等位置。
3 机器人运行情况
3.1 结构运行情况
总体运行稳定,前进和后退驱动系统同步性好,无啃轨现象。电缆卷线器运行顺畅,电缆展开平整,无剐蹭,扭曲。供电系统运行稳定,电力和信号传输稳定,各项安全指标均达到设计要求。
3.2 手臂运行情况
手臂翻转启动和停止抖动小,运行速度快,系统响应快等。液压系统运行正常,无异响和异常发热情况。油缸、管道和接头无漏油,振动,电机驱动系统运行无异响,发热等。
3.3 机器人总体联动情况
总体联动动作协调,运行轨迹平滑,总体无抖动,滑行,无异常噪音,运行稳定,多次测试、运行未发现异常,总体测试运行符合设计要求。
3.4 机器演出情况
机器人至开始投入演出以来,设备运行稳定,操作简便,保养维护方便,受到演员及甲方领导的多次肯定。其大体量和蒸汽朋克风格,吸引了无数的观众来一睹它的表演,机器人装置成了侨城园区标志性的机械装置和网红打卡点。
4 电气控制原理
电气控制原理图见图5。

图5 电气控制系统
4.1 电气控制方式
电气控制机械控制台布置在机器人外侧专用控制功能房。机器人脚底电柜房电柜也可对机器人进行控制。机械控台对机器人的控制通过现场总线,采用有线连接控制[5-7]。
4.2 机器人运行情况
机器人设备作为表演装置,他的运行轨迹和动作都是提前编排好的,演出时通过自动控制程序,自动运行场景,自动监控,操控人员及时监控及控制。
4.3 机器人安装措施
机器人的运行动作和周边其它设备均设有位置互锁。操作时,机械控制人员按下启动按钮,机器人自动按照编好的场景程序运行,操控人员全程监控,发现异常,及时停止,确保设备运行稳定、安全[5-7]。
4.4 机器人应急措施
机器人装置设置有多个紧急停止开关,位置分布于机械控台、电控柜、卷线器、腰身旋转平台等。遇到突发事件,专业培训保障人员及时就近按下急停开关。
5 结论
该机器人装置各项指标都满足设计要求,至参与演出以来,运行稳定,结构可靠,故障率低等。其蒸汽朋克式的风格和机械质感的外形,深受观众的喜爱。随着国内演绎事业的不断发展,国家大力提倡夜文化、夜经济,我们将打造出更多的符合大众审美的机架类装置。
