智慧化工园区刺激性气体污染源定位技术
2022-10-21金周军
金周军
(1.聚光科技(杭州)股份有限公司,浙江 杭州 310000;2.清本环保工程(杭州)有限公司,浙江 杭州 310000)
引言
智慧化工园区是一个汇集多个化工企业的重要聚集区域[1],但园区内分布着大量污染源[2],对周围区域的环境造成严重的影响。随着我国对环境保护的重视,人们对空气质量的要求越来越高,减少其他污染排放已经成为目前的必然选择[3]。受智慧化工园区内部组成复杂性的影响,其很难进行污染源定位[4],现存的气体污染源定位技术也存在较高的定位偏差,因此急需设计一种新的气体污染源定位技术。
早期相关研究人员主要使用传感器网络或使用粒子群算法构造污染物定位矩阵对气体污染源进行定位,但上述方法往往定位精度较低,定位速度也相对较慢[5],经过多次分析发现,气体污染源在进行传播时存在多维扩散关系,因此本研究根据气体污染源扩散现状,构建了多维浓度扩散模型,设计了有效的刺激性气体污染源多维定位技术,为后续智慧化工园区的环境保护提供一定的依据。
1 刺激性气体污染源多维定位技术设计
1.1 采集刺激性污染源信息数据
为了提高刺激性污染源多维定位效果,降低定位偏差,首先需要采集准确的污染源信息数据,本研究使用上位机辨识法构建了刺激性污染气体信息数据采集平台[6],主要利用贝叶斯概率数学模型,可以实时验证检测到的信息样本值,确定各个方位的后验概率。本研究设计的刺激性污染源定位技术为快速地恢复传感器灵敏度,使用陶瓷管、测量电极等敏感元件设计信息传感电路,如图1 所示。

图1 信息传感电路
由图1 可知,该信息传感电路可以实时监测传感器的电导率,一旦其发生明显变化需要立即使用内部加热器进行处理,始终保证其获得数据的有效性。
1.2 构建气体污染源多维浓度扩散模型
为确定污染源方向,提高污染源定位的准确性,构建气体污染源多维浓度扩散模型。首先,在空气中构建一个二维坐标系,假设某时刻该坐标系中的某点释放了一个质量为M的污染源,该污染源会持续进行扩散,此时该污染源在空气中的二维扩散模型如式(1)所示。

公式(1)中,∂ 代表扩散参数,C 代表扩散初始位置,t代表扩散时间,DX、DY分别代表扩散后坐标点,x、y 分别代表扩散前污染源坐标,此时该模型必须满足扩散初始条件V(x,y,t),如式(2)所示。

公式(2)中,δ (x)、δ (y)均代表扩散初始系数,此时可以将上述设计的扩散模型进一步优化,确定基础扩散系数,并将扩散模型进行二次简化,简化后的扩散模型E 如式(3)所示。

公式(3)中,D 代表扩散系数,ξ 代表污染物排放速率,n 代表扩散效率。
由于污染物在一定的维度变化下具有一定的扩散稳定性,此时可以设计一个与该二维浓度分布图相拟合的扩散函数erf(x),如式(4)所示。

公式(4)中,e 代表污染物扩散属性,λ 代表扩散运动常数,d 代表扩散距离,上述污染物扩散模型属于二维扩散模型,其只能定位一个平面中的污染源数据,但智慧化工园区属于三维空间,因此需要构建三维浓度扩散模型提高其污染源定位的准确性,在污染源定位区域构建一个三维直角坐标系,假设某时刻投放了一个污染源,此时该污染源的三维扩散模型C0如式(5)所示。

公式(5)中,D X、DY、DZ分别代表污染源扩散前的三维坐标,x、y、z 分别代表扩散后的三维坐标,假设污染物存在扩散同向性,此时可以对该模型进行简化处理,处理后的模型C1如式(6)所示。

使用上述简化的模型可以成功确定污染源的方向,提高污染源定位的准确性。
1.3 设计气体污染源定位算法
本研究使用状态观测法,判断各个变量之间的关系,设计污染源定位算法,如式(7)所示。

公式(7)中,xk代表待求状态变量,zk代表实际扩散变量,f(xk-1)代表观测噪声,h(xk)代表高斯噪声,Wk、Vk均代表定位方差。
使用上述定位算法定位后,还需要对原有的污染源坐标进行更新,此时可以对原有的污染源坐标进行变换处理,其变换式W0如式(8)所示。

公式(8)中,n 代表变换维数,变换完毕后,污染源的位置与实际定位位置偏差较低,但为了判断污染源下一步扩散效果,保证定位的动态性,需要对定位位置进行预测,预测值L 如式(9)所示。

公式(9)中,XK-1代表预测更新向量。本研究设计的气体污染源定位技术使用质心定位法提高定位的精准性,确定污染物的探测浓度信息,得到污染物定位式S,如式(10)所示。

公式(10)中,dD代表传感器探测节点,σ 代表污染气体浓度检测信息,结合该污染物定位模式,可以对找到最早确定污染物的传感器节点,计算区域定位质心,再使用结合解析法进行求解。
2 实验测试
为了验证本研究设计的刺激性污染源多维定位技术的定位效果,本研究搭建了相关的实验平台,将其与常规的污染源定位技术对比,进行实验。
2.1 实验准备
本研究选取A 智慧化工园区进行污染源分析,经过检测发现,该智慧化工园区共存在54 种气体污染类型,为了提高实验的敏感性,降低实验误差,本研究选取LUGB 气体传感器进行实验。
传感器放置的位置需要与智慧化工园区内的空间特质相拟合,为了避免实验的随机性,可以将A 智慧化工园区划分成若干个不同的区域,随机向各个区域投放数量相等的测试传感器,再根据各个区域的浓度规定气体源特质,排除颤动干扰,此时各个测试区域的传感器节点数量与收敛效果如图2 所示。

图2 收敛变化示意图
由图2 可知,随着传感器节点的增加,SOURCE和MLE 的变化趋势不同,为了降低实验偏差,本研究使用了AND 财务处理软件,将采集到的处理信息利用Sink 点进行处理,直至误差低于实验允许误差。
污染源数据处理完毕后,可以将其输入到MP426数据储存芯片中,再使用LabVIEW 平台判断气体传感阵列,此时可以根据污染源与测试节点的关系,规划5 组不同方向的测试污染源,这些污染源的均值向量参数如表1 所示。
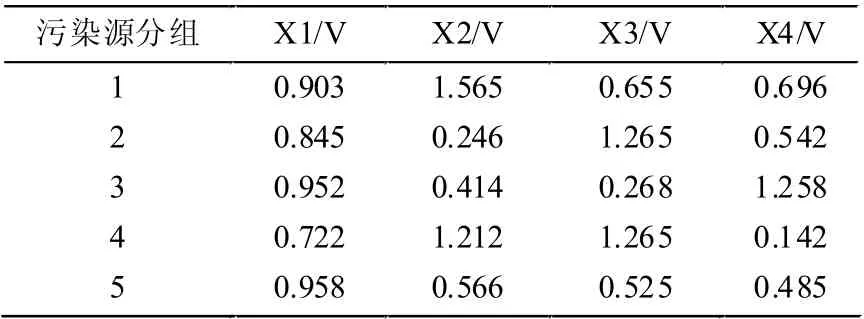
表1 污染源参数
结合表1 的污染源参数,可以设计污染源定位偏差计算式P,如式(11)所示。

公式(11)中,D 代表定位范围,D0代表实际定位点,G代表定位参数,若该定位偏差值低于0.5,则证明定位的污染源位置与实际污染源位置偏差较小,反之则证明偏差较高,按照上述规定的污染源参数可以得到定位污染源角度,将其与实际的污染源位置比照,判断实验的可行性,污染源角度比照结果如表2 所示。
由表2 可知,使用上述参数规划的污染源角度与实际污染源角度相拟合,符合实验需求,可以进行后续的污染源定位分析。
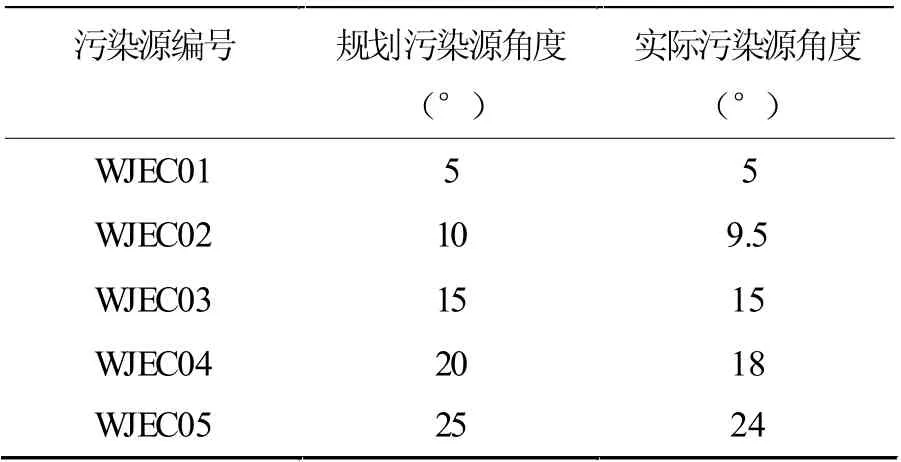
表2 污染源角度比照
2.2 实验结果
结合上述的实验架构及实验环境,使用规划的污染源进行污染源定位实验,即分别使用本研究设计的刺激性气体多维污染源定位技术及常规的气体污染源定位技术进行定位,计算两种技术的污染源定位定位偏差,实验结果如表3 所示。
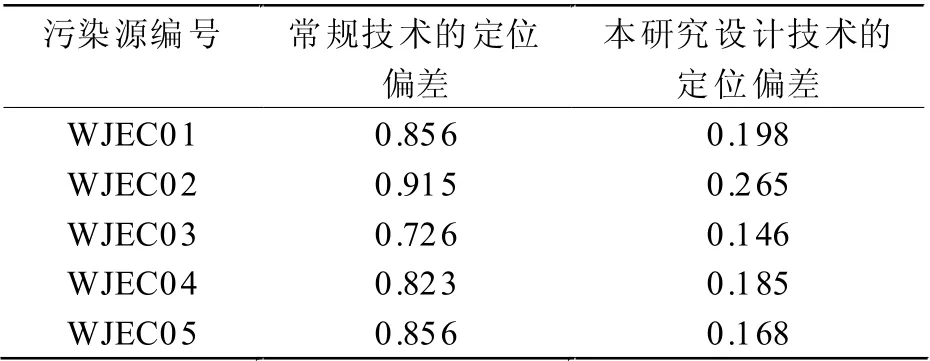
表3 实验结果
由表3 可知,本研究设计的刺激性污染源多维定位技术的污染源定位偏差均低于标准定位偏差值0.5,证明其定位的位置与污染源实际的位置相近,定位偏差较小;常规的刺激性污染源定位技术的定位偏差值高于标准定位偏差值,其定位偏差较大;证明本研究设计的刺激性气体污染源多维定位技术的定位精度较高,定位效果较好,符合智慧化工园区的污染源定位需求。
3 结论
综上所述,智慧化工园区是一种集多种工业化进程为一体的特殊工业生产区域,其内部释放污染气体总量较高,严重影响了周边的生态环境,因此急需进行气体污染源定位。常规的气体污染源定位技术的定位偏差较高,不满足智慧化工园区需求,因此本研究设计了一种新的气体污染源多维定位技术,实验验证可知,设计的气体污染源技术的定位偏差较小,定位精度较高,具有一定的应用价值,可以为后续智慧化工园区生态环境建设作出一定的贡献。
