基于改进UKF 的转弯机动目标跟踪算法研究
2022-10-20李盈萱王中训董云龙
李盈萱,王中训,董云龙
(1.烟台大学 物理与电子信息学院,山东 烟台 264005;2.海军航空大学信息融合研究所,山东 烟台 264001)
0 引言
机动目标跟踪广泛应用于军用及民用领域,且一直是目标跟踪领域研究的重点和难点[1],其核心在于建立与目标实际运动状态匹配的系统模型和选择合适滤波算法[2-3]。
在目标的各种运动中,转弯运动是一种常见的运动形式,对做转弯运动的目标进行跟踪时,如果跟踪模型中设置的转弯率与实际情况不符,会产生较大的估计误差[4],而实际上,目标运动的转弯率多数情况下都是未知的。因此,人们在固定转弯率的协同转弯(Coordinated Turning,CT)模型基础上进行了各种改进,以提高跟踪转弯运动目标的准确性和稳定性。主要有两种改进方法[5],一是对多个转弯率建立相应的跟踪模型[6],构建交互式多模型,二是通过实时计算实现转弯率自适应调节[7-10]。
除了要建立合适的系统模型,滤波算法的选择也十分重要。自20 世纪60 年代卡尔曼滤波理论提出至今,针对不同问题的各种滤波算法层出不穷。扩展卡尔曼滤波(Expanded Kalman Filter,EKF)算法[11-12]、不敏卡尔曼滤波(Unscented Kalman Filter,UKF)算法[13]、粒子滤波(Particle Filter,PF)算法是几种常用的非线性滤波算法。
文献[14]在UKF 中引入自适应估计原理,调节状态预测和量测信息的权值比重,降低异常对滤波造成的影响。文献[15]结合强跟踪正交性原理提出一种强跟踪UKF滤波算法,改进渐消矩阵的求解方法,解决UKF 与紧耦合模型不匹配的问题。文献[16]采用UKF 对神经网络进行训练,并研究了基于UKF 神经网络的全局信息融合。文献[17]使用BP 神经网络改进的UKF 修正滤波误差,通过最优加权的方法得到系统的全局最优估计值。
UKF 算法不需要对状态方程和量测方程做线性化处理,且滤波精度较高,因而获得更多的关注和更广泛的应用[18]。
1 基于UKF 的转弯机动目标跟踪
1.1 转弯模型
CT 模型原理图如图1 所示,假设目标以转弯率ω在二维平面内做转弯运动,根据转弯率定义CT 模型原理图如图1 所示,假设目标以转弯率ω=和式(1)描述的空间运动转换关系,可以得到状态方程式(2):

图1 CT 模型原理图

转弯机动模型的跟踪效果非常依赖于模型中转弯率与目标实际运动转弯率的匹配程度。而在实际的跟踪系统中,转弯率一般是未知的。此时,可将转弯率作为状态变量加入转弯模型中,构造扩维转弯机动模型,利用滤波器对转弯率进行实时计算并更新,状态向量表示为对应的状态转移矩阵调整为:
目标转弯率与其他各状态变量之间是一种非线性关系,所以滤波时应采用能够处理非线性模型的滤波算法,本文采用不敏卡尔曼滤波进行跟踪。
1.2 UKF 算法
不敏卡尔曼滤波器的核心是不敏变换,其原理是以前一时刻的估计值为中心,选取一系列对称分布点的采样点,对前一时刻的概率分布规律进行模拟。不敏卡尔曼滤波过程可简述如下:
(1)以前一时刻的状态估计点为中心,通过状态协方差估计向量确定采样范围,计算出(2nx+1)个δ 采样点ξi并赋予相应的权值Wi。其中,nx为状态向量维数,和Px表示k 时刻目标状态和协方差估计向量,κ 表示尺度参数。

(2)根据状态方程,得到采样点的一步预测,进而利用采样点的一步预测及对应权值得到状态和状态协方差估计向量,已知Q(k)为过程噪声协方差,状态方程为ξi=(k+1|k)=f(k,ξi=(k|k)),则:

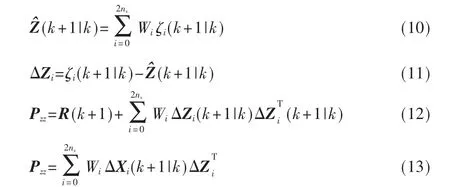
(3)根据量测方程和采样点一步预测得到量测和相应协方差及量测和状态向量的交互协方差。已知量测方程ζi(k+1|k)=h(k+1,ξi(k+1|k)),则:
(4)对状态向量和协方差进行更新

2 改进的UKF 算法
通过式(5)可以看出,不敏卡尔曼滤波是以前一时刻的状态估计为中心,在通过状态协方差的估计向量Px确定的范围内选取采样点的,当目标机动状态在较长一段时间内不发生改变或系统达到稳态时,Px将趋于极小值,以此确定的采样范围将十分有限,导致下一时刻大部分采样点确定的转弯率十分相近甚至相同,如果目标继续维持先前的运动状态,跟踪滤波可以顺利进行,但如果此时目标发生机动,采样范围将不能及时做出调整,因而无法保证采样点的多样性和准确性,从而使滤波器基本丧失对突变状态的跟踪能力。基于此,本文提出了一种利用滤波新息构造修正因子λ,对UKF 采样范围进行自适应调整的方法。
文献[19]中提出了一种利用新息和新息协方差计算修正因子的简便方法,并用仿真证明了该方法具有良好的抑制发散的能力。本文中修正因子的计算主要借鉴这一方法。
首先利用实际量测和式(10)确定的量测估计值计算新息协方差(k+1)。

然后通过不敏卡尔曼滤波方程计算得到估计量测的估计协方差Pzz:

则修正因子可以表示为:

利用λ 对Px矩阵进行放大,自适应调整采样范围后,选取的采样点可表示为:

新息V 越大说明实际量测与量测估计的偏差越大,目标发生机动的可能性越大。此时,在进行不敏变换选取采样点的时候,应扩大采样范围,以覆盖更大的机动范围,提高跟踪的鲁棒性。通过上式计算得到的修正因子λ 在新息变大的同时也同步变大,以它作为系数对采样范围进行自适应放大,既增加了采样点各维度特别是转弯率的多样性,又不会因误差过大而影响跟踪精度,很好地满足了理论要求,并且计算过程简单,计算量小。
3 仿真验证
为了验证本文所提方法的有效性和优越性,设计如下仿真环境:雷达测距误差为100 m,测角误差为0.5°。目标运动起点为(12 000 m,2 000 m)处,运动时间持续200 s,前100 s 做转弯率多次突变的转弯机动运动,即假设目标在一段时间内保持匀速转弯运动,在某几个特定时刻目标转弯率突然发生变化,导致目标机动状态改变,后100 s 做转弯率不变的匀速转弯运动。具体机动情况如表1 所示。

表1 目标机动参数明细
分别采用常规UKF、用固定倍数放大Px矩阵(分别设定放大倍数为1.05、1.1 和1.2)的UKF、固定模型集IMM 算法(包含转弯率为10°/s、4°/s、-6°/s、-8°/s 的四个协同转弯跟踪模型)以及转弯率自适应调节(利用加速度除以线速度计算得到实时转弯率)的IMM 算法与本文所提自适应放大矩阵Px的UKF 方法对上述机动目标进行跟踪滤波,结果如图2~图5 所示。
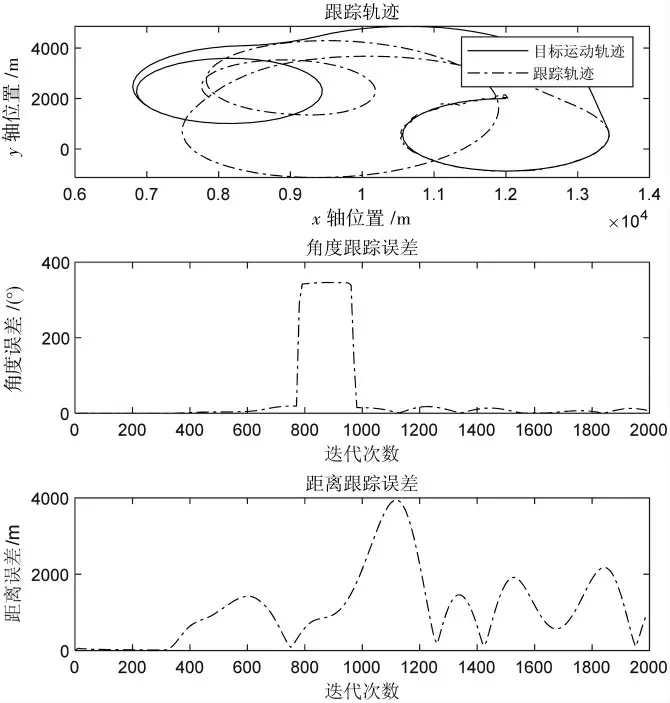
图2 常规UKF 跟踪结果
从图2 可以看出,利用常规UKF 方法对目标进行跟踪,在目标运动起始阶段转弯率稳定不变时,跟踪效果较好,但转弯率发生改变后,跟踪轨迹与目标实际运动轨迹的偏差越来越大,滤波器逐渐失去估计作用,无法对目标进行稳定跟踪。
从图3(Px矩阵固定放大1.05 倍和自适应放大Px矩阵的UKF 对目标的跟踪结果对比)可以看出,相比于常规UKF,两种改进方法的跟踪效果都有了明显改善,均能实现一定精度的跟踪,未出现滤波发散的现象。尤其在目标运动的后半段,即目标进行恒定转弯率的转弯运动时,两种方法的跟踪精度相近,误差小、跟踪效果稳定。但在目标运动的前半段,即转弯率多次发生改变的运动阶段,将Px矩阵固定放大1.05 倍的跟踪效果极不稳定,且误差明显大于自适应放大Px矩阵的跟踪效果。

图3 Px 矩阵固定放大1.05 倍与自适应放大的跟踪效果对比
从图4 中Px矩阵固定放大1.1、1.2 倍和自适应放大Px矩阵的UKF 对目标的跟踪结果可以看出,三种方法都能对目标进行有效跟踪,在转弯率多次发生突变的运动阶段,自适应放大Px矩阵和以1.1 作为固定倍数对Px矩阵进行放大的方法跟踪效果相近,而在转弯率稳定不变的运动阶段,前者的跟踪效果明显优于后者。而无论是在转弯率多次发生改变的运动阶段还是在转弯率稳定不变的运动阶段,自适应放大Px矩阵方法的跟踪效果都明显优于以1.2 作为固定倍数对Px矩阵进行放大的方法的跟踪效果。即过多的对采样范围进行放大,使采样点偏离中心值过大,反而降低了算法的跟踪精度,影响了跟踪效果。
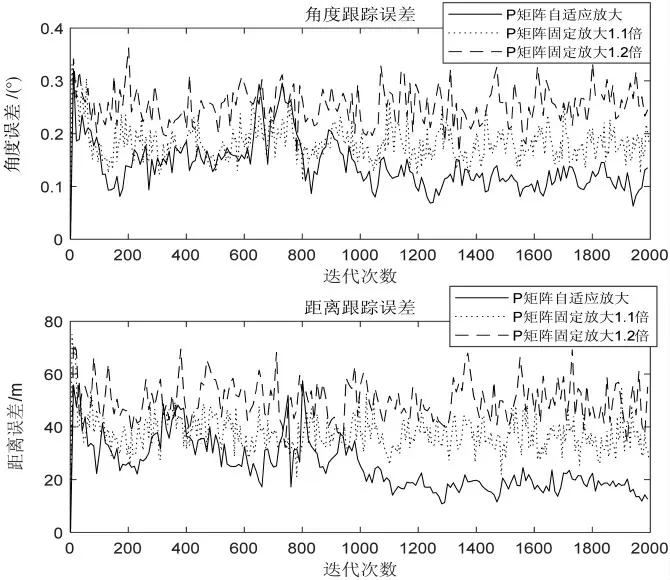
图4 Px 矩阵固定放大1.1、1.2 倍与自适应放大的跟踪效果对比

图5 Px 矩阵自适应放大与两种IMM 算法的跟踪效果对比
通过图5 中跟踪对比结果可以看出,利用滤波得到的状态信息计算转弯率对IMM 模型集中模型进行修正,相比于固定模型集IMM 滤波结果有明显改善,但用本文提出的方法进行跟踪结果更加稳定,且误差值更小。
由图2~图5 的跟踪结果可知,对采样范围进行适当放大,可以有效改善常规不敏卡尔曼滤波方法的跟踪性能,但若选取的放大倍数较小,对于机动目标的跟踪效果改善并不明显,选取的放大倍数较大,又会降低对于非机动目标的跟踪精度。因此,难以找到一个能够同时兼顾机动和非机动目标的合适的固定值。本文提出的改进方法,利用新息构造修正因子对采样范围进行自适应地放大,不仅能够很好地改善对于机动目标的跟踪效果,而且不会降低对于非机动目标的跟踪精度。
4 结论
目标机动状态发生突变时,常规UKF 方法不能及时调整采样范围,导致采样点无法及时准确模拟目标实际状态,最终导致滤波发散。而以某一固定倍数对采样范围进行放大,虽然有一定的改善效果,但难以同时兼顾目标机动和非机动运动情况。本文提出的方法,利用新息构造修正因子对UKF 算法的采样范围进行自适应的放大,将改进后的UKF 算法用于转弯机动目标的跟踪,滤波器在先验信息不准确的情况下能够进行自适应调节,保持良好的跟踪结果。
新方法不仅保留了常规UKF 解决非线性系统状态估计问题的能力,同时改善了由于滤波器本身存在机动响应延迟带来的鲁棒性差的问题。本文算法原理简单、计算量小,跟踪精度较高,理论分析和仿真实验都证明了其具有较强的适用性,可以应用于工程实践。但该算法虽然能够有效提高非线性系统目标跟踪的精度,但目前只是在高斯噪声的环境下进行处理,若系统是在非高斯的环境下,则可能出现较大误差,笔者将会继续对非高斯的环境下算法的应用进行研究和改进。
