高速公路拥堵路段缓解系统*
2022-10-18于凡媛
于凡媛,孙 宁
(南京林业大学汽车与交通工程学院,南京 210037)
1 引言
随着经济社会快速发展与民众生活品质的相应改善,私家车辆数量增加很快,尤其自公路重大节日免费优惠政策实施以来,假期车流量更是持续上升,甚至远远突破开初高速公路的设计流量,达到饱和状态,各类交通问题也是层出不穷。车速高低、车距失当、恶劣环境等因素,也会使交通过程中断或形成交通瓶颈,造成严重堵塞。近年来,相关方案不断被提出,尝试缓解高速公路拥堵及安全隐患等问题[1]。本研究基于现有研究成果,提出一款高速公路拥堵路段缓解系统。系统具有车速监测、车距雷达、超车预测和智能扣费等特色功能,可有效监测高速公路行车的车速高低和车距大小;通过雷达系统进行车距分析,综合判断道路车辆是否存在超车风险,以预测和警报的方式规范驾驶员驾车,保证行车效率和驾驶员安全。
2 系统设计
系统整体设计原理如图1所示,它是以树莓派处理器为核心,运用车速监测、车距雷达功能对高速公路上的车辆的车速和车距进行监测和分析,同时根据是否具有超车风险评估驾驶人员的驾车水平,若出现超车情况则对驾驶员进行智能扣费,以此约束驾驶员行为。

图1 系统总体方案
根据“车联网”理念[2],该系统将车载无线连接网络与车载设备连接,共享实时信息与数据,从而获得车辆自身设备信息、驾驶员情况、道路周边环境信息、车载设备情况等。使高速公路上的行车情况更加具体,更具有准确性。
3 硬件电路设计
系统硬件部分主要由电源模块、主处理器模块、无线车载通信模块、驾驶员视频监控模块、汽车加速传感器模块组成。
3.1 供电模块
供电模块电路图由图2所示。该模块由5.0 V的蓄电池供电。在模块电路中,AMS1117-3.3是一种高效能的、低电压差分线性稳压器,用于高效能线性调整器的输出功率调节器,能够实现把5V的电源转换到3.3V。

图2 供电模块电路
电容C1和C2是用于防止电源断电后的电压反转,在一般情况下,输入电容器的容量要比输出电容器大。C3和C4为输出滤波器,其功能是抑制自激振动,保持输出电压稳定[3]。PIN是一种二极管,它是将一层薄的低掺杂的本征半导体层加入到P类半导体材料与N类半导体材料之间来实现的。本征半导体的导电性介于导体与绝缘体之间,作用是减少结电容、载流子的渡越时间,改善频率响应,同时也能扩展光电变换的工作范围,增加其灵敏度。
3.2 处理器模块
处理器模块电路如图3所示。该部分模块以树莓派为核心,以Linux为基础,具有小型、多功能、多处理量的特点,能够将微机和微机的I/O功能很好地融合在一起。该系统包括应用程序处理器和多媒体处理器,由5V微型USB连接供电,运行流畅、速度快。

图3 处理器模块电路
由图中可见,系统核心选用BCM2835,这将性能提升到原来的近10倍,内存翻了近一倍。串行通讯采用485接口来实现对设备的控制和读取[4]。通过处理器的工作,汽车行驶状态、道路自身状况、道路周围环境等得到大规模的分析与处理,能够高效地实现实时车辆监测,提高数据精准度。
3.3 无线通信模块
无线通信模块选用SIMCom公司的SIM900A芯片,以GSM/GPRS双频模式在900MHz和1800MHz上实现语音、短信、数据、传真等多种通信方式。
该模块具有RS232和LVTTL串行接口,通过硬件流程进行控制,可在很大工作范围内工作,方便用户使用。GSM基带、存储器、GSM射频[5]、天线接口以及其它接口等都是它的重要组成部分。
该部分模块电路图如图4所示。GND接口接电源,RXD和TXD接MCU、TXD[6]。它的无线通讯模块能够很容易地与用户的产品相联系并提供包括语音、短信、GPRS等多种功能。该模块需要5V的电源,能与MCU直连,并提供短信、数据、网络等多种功能。采用复位排针[7],便于现场无人值守、DTMF等远程遥控,提高了软件使用与开发的便利性。

图4 无线通信模块电路
3.4 驾驶员监测模块
驾驶员监测模块电路如图5所示。模块以摄像头为中心[8],通过多方联通,对驾驶员自身情况和道路周边情况进行分析。通过上位计算机对高速公路上的车辆、路况进行实时视频显示,满足监控需求。
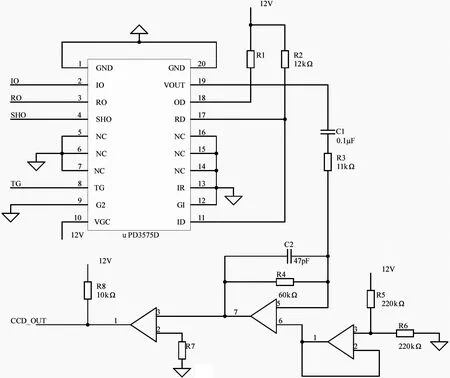
图5 驾驶员监测模块电路
模块选用uPD3575D传感器[9],这是一款具有高灵敏度、低暗电流和1024像素的内置传感器。其功能是保持、放大线阵CCD的图像[10],常应用于传真、图像扫描、OCR等领域[11]。该电路的内部部分包括一系列1024象元的感光二极管和两列CCD电荷传输寄存器。光敏阵列将照射到CCD上的光转化成电荷信号,然后分别转移到两侧的转移栅[12]。其正常工作电压条件为5V~12V。
3.5 加速度传感器模块
该模块电路图如图6所示。它的功能是加速监测,利用感应加速度,将其转换为电子信号。传感器把测量点的加速度信号转化成相应的电子信号后,将其输入到一个预处理电路中,通过这个电路提高信号的信噪比,再利用ADC变换获得数字信号,实现数据的储存、调用和显示。
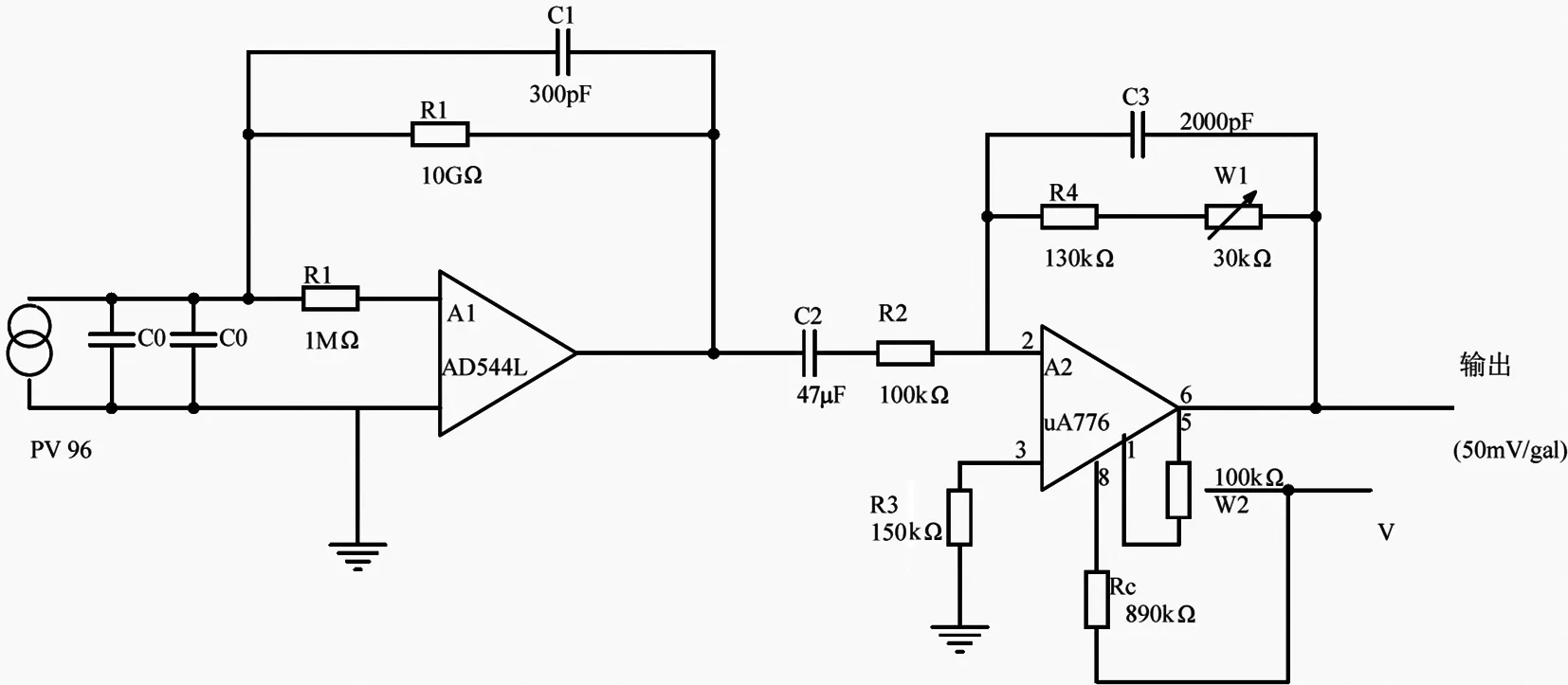
图6 加速度传感器模块电路
图6中的电路是通过一个电荷放大器和一个电压调节器来实现的。第一阶段为电荷放大器,它的低频响应取决于反馈电容器C1和反馈电阻器R1;低频截止频率为0.053Hz。Rf为过载保护电阻器。第二个阶段是一个输出调节放大器。调节电位计W1可以产生大约50mV/l的输出。A2是一种低功率的多功能可编程运放,它可以在它的第8脚输出一个合适的工作电流以减少声音的影响。Cc表示电缆电容,C0表示传感电容。
4 软件设计
软件设计选用Visual Basic6.0软件,以此搭建高速公路拥堵路段缓解系统的软件界面。软件主界面如图7所示。通过主界面上的各功能按键,对各高速及拥堵路口上通行车辆之间的车辆速度、路口前后及左右二侧车辆之间的相对车距等,系统便可实时做出检测,并对司机的车速规范性做出综合评价,实现高速智能快速扣车费。
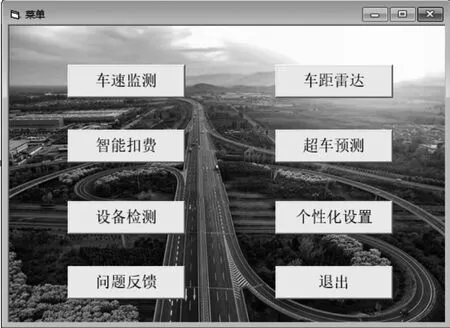
图7 软件主界面
系统软件整体工作流程如图8所示。首先在界面上点击开始按键,输入账号和密码,对使用者身份进行选择。管理员和用户身份均可相应地进入车速监测、车距雷达、智能扣费、超车预测、设备检测等特色界面。通过主处理器的数据进行分析和处理,实现全方位的细致动态观测。软件设定了使用者权限,一般使用者登陆后只能浏览界面资讯,而系统管理员则可手动调度、发送调度信息、设定界面。使用过程想要退出或者使用完毕后,用户或管理员点击退出按键,即可返回最初开始界面。

图8 系统软件流程图
车速监测界面如图9所示。单击车速监测按钮,该界面先识别出高速公路上正在行驶的车辆信息,通过识别车辆型号和使用性质确定该车的行驶标准速度,然后从加速度和速度两个方面用电脑绘制出该车近几个小时的数据曲线[13],从两个维度进行精确分析,观察行车速度和加速度的发展趋势,观察完毕之后,单击返回按钮可返回到菜单界面。

图9 车速监测
车距雷达界面如图10所示。雷达同样先识别行驶车辆的型号和使用性质,确定与前后左右行驶车辆的安全距离,通过雷达系统自动扫描出与各车之间的距离。若车辆间距小于安全距离,系统会自动发起警报,提示存在安全风险,提高驾驶员的安全意识;若车辆间距在安全行驶距离内,则无警报,可单击扫描完毕按钮,返回主界面。

图10 车距雷达
智能扣费功能如图11所示。单击智能扣费,进入智能扣费界面,由系统之前对车速和车距的精确监测确定该车辆的当前行驶速度,自动和该高速道路当前限速做比较,判断是否发生超速或慢速,提醒驾驶员调整当前行驶车速。若在正常安全的行驶速度内,则无任何显示,点击正常行驶按钮,界面将无任何变化。

图11 智能扣费
超车情况显示功能如图12所示。若当前行驶车辆已超速,单击超速,进入超速情况界面。系统通过超速的程度,遵循正比例曲线图,对该行驶车辆进行智能扣费[14]。收费方法多种多样,既可以用微信、支付宝的二维码,也可以直接从驾照卡上扣钱,还可以到就近的监控站点进行现金付款。若扣费成功,单击返回按钮,回到智能扣费界面。

图12 超车情况
超车预测功能界面如图13所示。单击超车预测按键之后,系统会先对当地的天气情况进行监测,用户和后台管理员将通过气象监测设备,比如卫星探测、车辆传感器、GPS定位等,得到天气、风力和风向等环境信息,随后这些实时天气数据信息会被快速传递给处理器进行分析,显示出近期天气情况。结合天气信息,通过GPS、地图等手段,识别出前方的交通信号灯和后面车辆数量,进而判断出当前车辆有无超车危险。

图13 超车预测
5 结束语
基于树莓派处理器,运用智能监测技术,将车载无线网络与车载设备相连接,通过车速和车距监测,对车辆是否会超车进行预测,并对驾驶员是否能够在高速公路上安全驾驶进行评估和智能扣费,以此便发挥了智能交通的技术优势。使信息安全和物联网相结合,便可有效地解决高速公路拥堵问题。该设计方案适应高速公路情况,提高高速公路车辆行驶的规范性、高效性,结构简单,有一定的实用价值。
