仿尺蠖型火星车设计与验证
2022-10-15张旺军党兆龙陈百超
张旺军,党兆龙,陶 灼,贾 阳,陈百超,潘 冬
(北京空间飞行器总体设计部,北京 100094)
0 引 言
随着火星探测任务的不断深入,火星车作为开展火星表面巡视探测的最常用工具,已成为相关国家开展火星探测研制的焦点。
美国已成功发射了并投入的三代火星车(旅居者、勇气号/机遇号、好奇号/毅力号)均为被动悬架式火星车,在火星表面运行过程中出现了车轮沉陷、爬坡困难和托底等问题,除火星表面地形复杂的原因外,最主要的原因是采用的被动悬架无法调整车体高度。因此,近年来主动悬架因可调整车体高度而成为星球车研究的重要方向。
美国喷气推进实验室提出了一种微小型四轮主动悬架,该悬架使火星车具有多变的结构,具有良好的自校正功能,但只适用于微小型火星车。喷气推进试验室还提出了一种SRR(Sample return rover)四轮主动悬架,该悬架可以调节车体高度,提高了火星车的越障能力和爬坡能力,但不能解决车轮沉陷的问题。欧洲ExoMars巡视器采用了一种六轮式的主动悬架形式,采用了3个相同的平行架,具有较好的地形适应性,但是车轮沉陷脱困能力较差。国内,哈尔滨工业大学提出了一种适用六轮月球车的串联铰接多关节悬架,该悬架为主被动混合的系统,可通过蠕动提高脱困能力,也可通过抬轮主动跨越较大的沟和台阶,该悬架的不足之处在于机构繁多复杂,控制难度大。作者团队受自然界尺蠖运动的启发,在主动悬架式火星车的基础上,提出了一种仿尺蠖型主动悬架系统,以最少的资源解决上述问题。迄今为止,尚未检索出将尺蠖运动应用于巡视器的相关文献。
本文设计一种仿尺蠖型火星车,作为主动悬架式火星车的一种,它采用由摇臂式被动悬架改造的主动悬架,可以模仿尺蠖运动的特征提高驱动力实现车轮沉陷脱困,还可抬升车体高度实现大型障碍物通过,降低车体高度实现大角度坡面爬升。拟开展地面试验对该所设计的仿尺蠖型火星车进行验证。
1 仿尺蠖型火星车工作原理
尺蠖是尺蠖蛾幼虫的总称,属于节肢动物。尺蠖身体细长,主要由头部、尾部和躯体三部分组成,行动时一屈一伸像个拱桥,休息时身体伸直状如树枝。具备模仿尺蠖运动特征的火星车称为仿尺蠖型火星车。把仿尺蠖型火星车的前轮看成尺蠖的头部,后轮和中轮看成尺蠖的尾部,主前摇臂和主后摇臂可以看成尺蠖的躯体,火星车的悬架结构从形态上接近尺蠖,如图1所示。
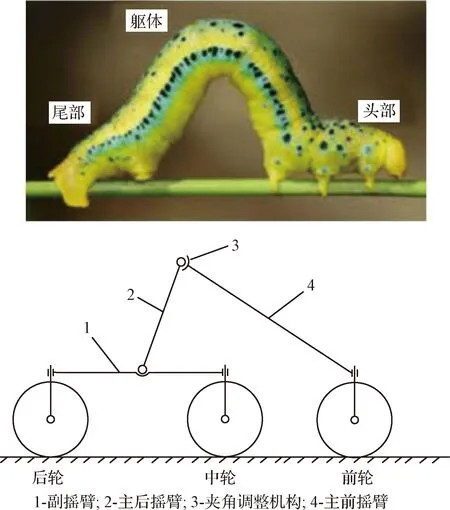
图1 仿尺蠖型火星车主动悬架原理图Fig.1 Schematic diagram of the active suspension of the inchworm-like rover
仿尺蠖型火星车最重要的功能是通过车体的抬升和下降模仿尺蠖运动,一个周期的尺蠖运动分四个阶段,尺蠖运动前半周期,夹角调整机构运动,车体抬升,同时前轮不动,中轮和后轮向前滚动,前轮和中轮轮间距变小,如图2(a)所示;尺蠖运动后半周期,夹角调整机构运动,车体下降,同时前轮向前滚动,中轮和后轮不动,前轮和中轮轮间距变大,如图2(c)所示。往复上述运动,实现尺蠖运动。
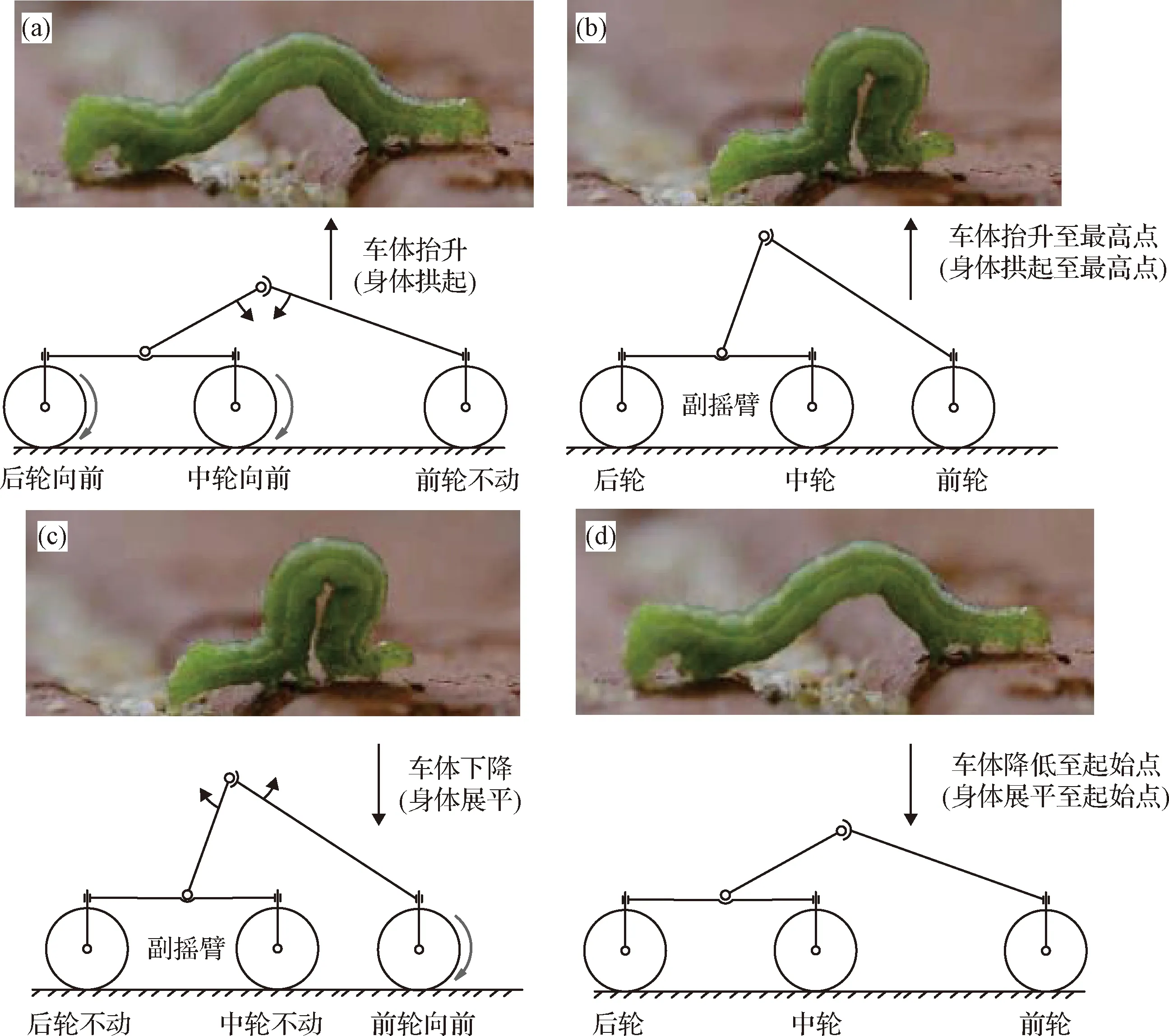
图2 火星车模拟尺蠖运动示意图Fig.2 Schematic diagram of the rover imitating inchworm motion
仿尺蠖型火星车运动的原理在于车体抬升或降低的过程中,车轮需要配合车体的运动进行旋转,使轮间距发生周期性的变化,实现尺蠖运动。尺蠖运动过程中车轮的受力如图3所示,而常规移动状态下车轮的受力如图4所示。从图中可见,在尺蠖运动中,通过主动轮和制动轮的转变,实现了受力的改变,将车轮的阻力转换为车轮的驱动力,从而提高整车的通过能力。
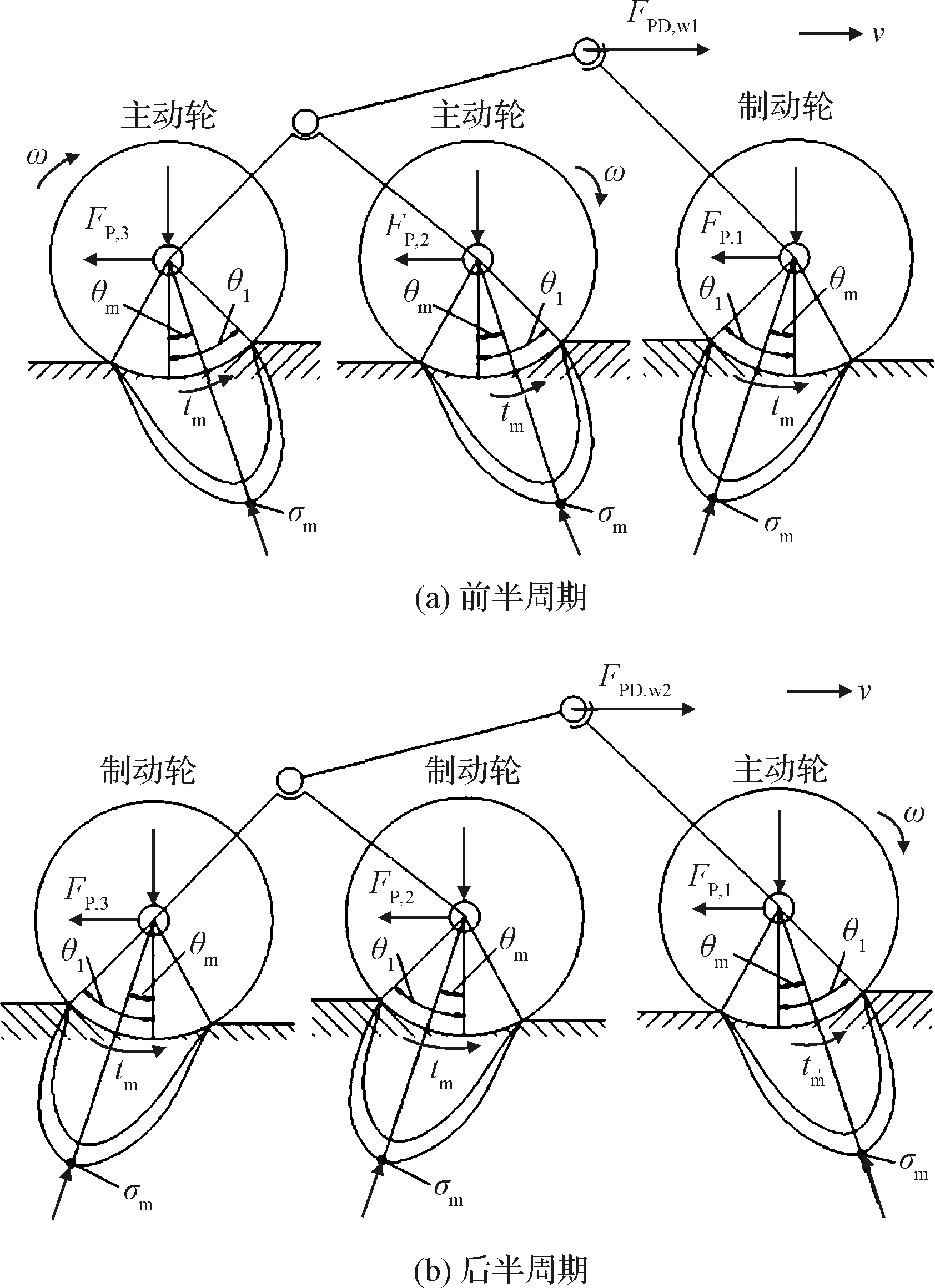
图3 尺蠖运动下整车受力状态Fig.3 Stress state of the Mars rover during the inchworm-like motion
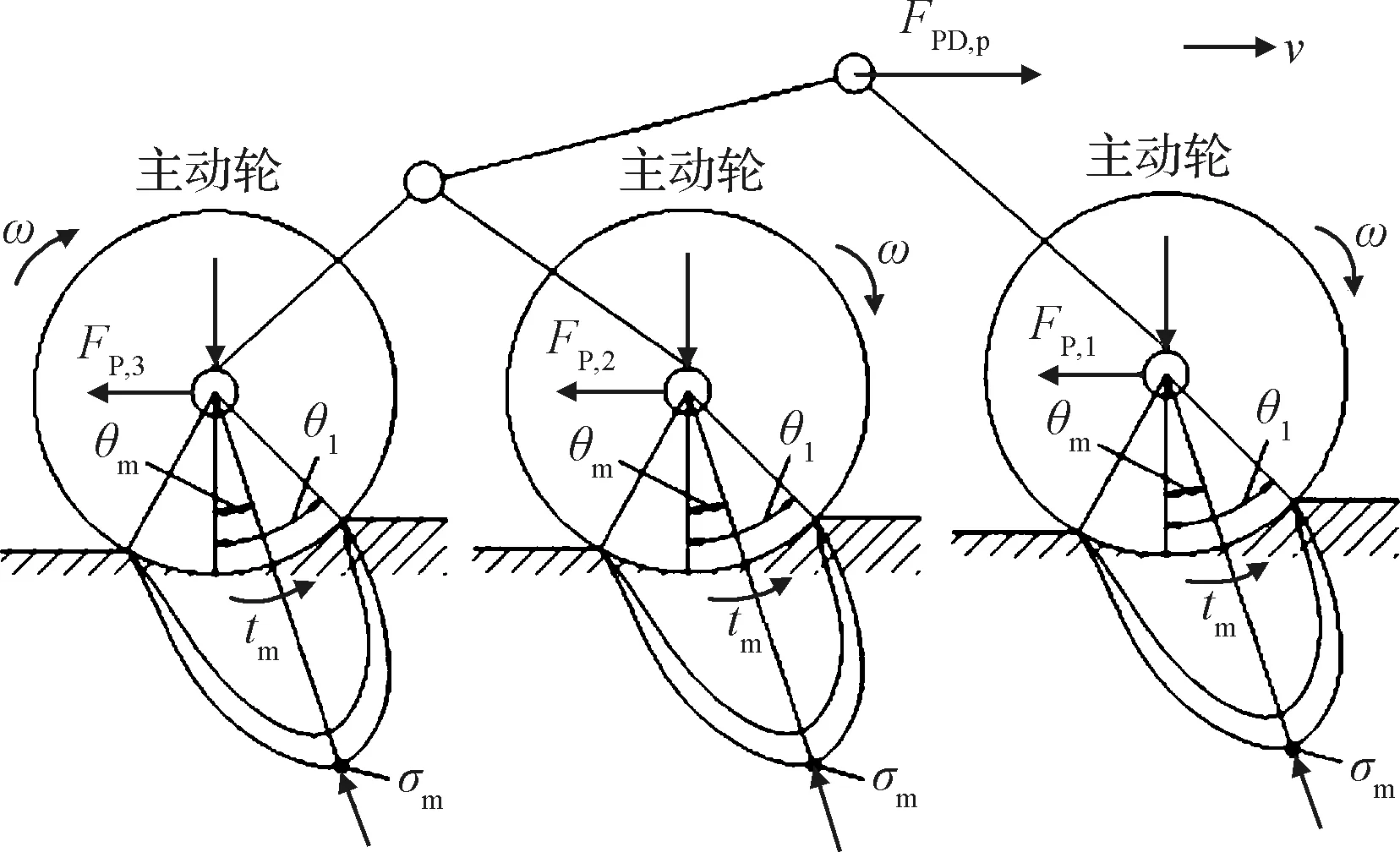
图4 常规移动时整车受力状态Fig.4 Stress state of the Mars rover during the normal motion
常规移动整车挂钩牵引力可表示为式(1),尺蠖运动前半周期整车挂钩牵引力和后半周期整车挂钩牵引力可表示为式(2)和式(3)。

+]-[sin()-sin()]}
(1)

+]-2[sin()-sin()]}
(2)

+]+2[sin()-sin()]}
(3)
式中:为车轮半径,本文取0.15 m;为车轮宽度,本文取0.15 m;为车轮正应力;为车轮切应力;为进入角;为正应力、切应力最大值所在角度。
仅考虑静沉陷量,则进入角为:
(4)
式中:为车轮沉陷量。
正应力、切应力最大值所在角度为:
=(+)
(5)
式中:,与土壤特性有关,通常取≈04,∈[0,03]。
滑转率的定义为:
(6)
式中:为车轮转速;为车轮前进速度。
根据式(1)~(6),可以绘出车轮沉陷量和牵引力的关系曲线,如图5所示。从图中可见,车轮沉陷0.05 m,尺蠖运动相对常规移动,牵引力增加80%;常规移动状态下,车轮沉陷超过0.12 m将无法脱困,采用尺蠖运动则可在车轮沉陷0.3 m时实现脱困。

图5 不同运动模式车轮沉陷量与牵引力关系曲线Fig.5 Curves of relationship between wheel sinkage and traction force in different motion modes
本文提出的仿尺蠖型火星车是一种主动悬架式火星车(图6(a)),它和被动悬架式火星车(图6(b))最核心区别在于主前摇臂和主后摇臂间是否可以运动,如果两者为固定连接,就变成被动悬架式火星车。从图6中可见,仿尺蠖型火星车悬架系统的每一侧仅比被动悬架式火星车多一套夹角调整机构。

图6 仿尺蠖型火星车和被动悬架式火星车对比图Fig.6 Comparison of inchworm-like Mars rover and Mars rover with passive suspension
仿尺蠖型火星车和被动悬架式火星车的性能对比见表1。可见,仿尺蠖型火星车可以解决火星车在火星表面遇到的4种难题。
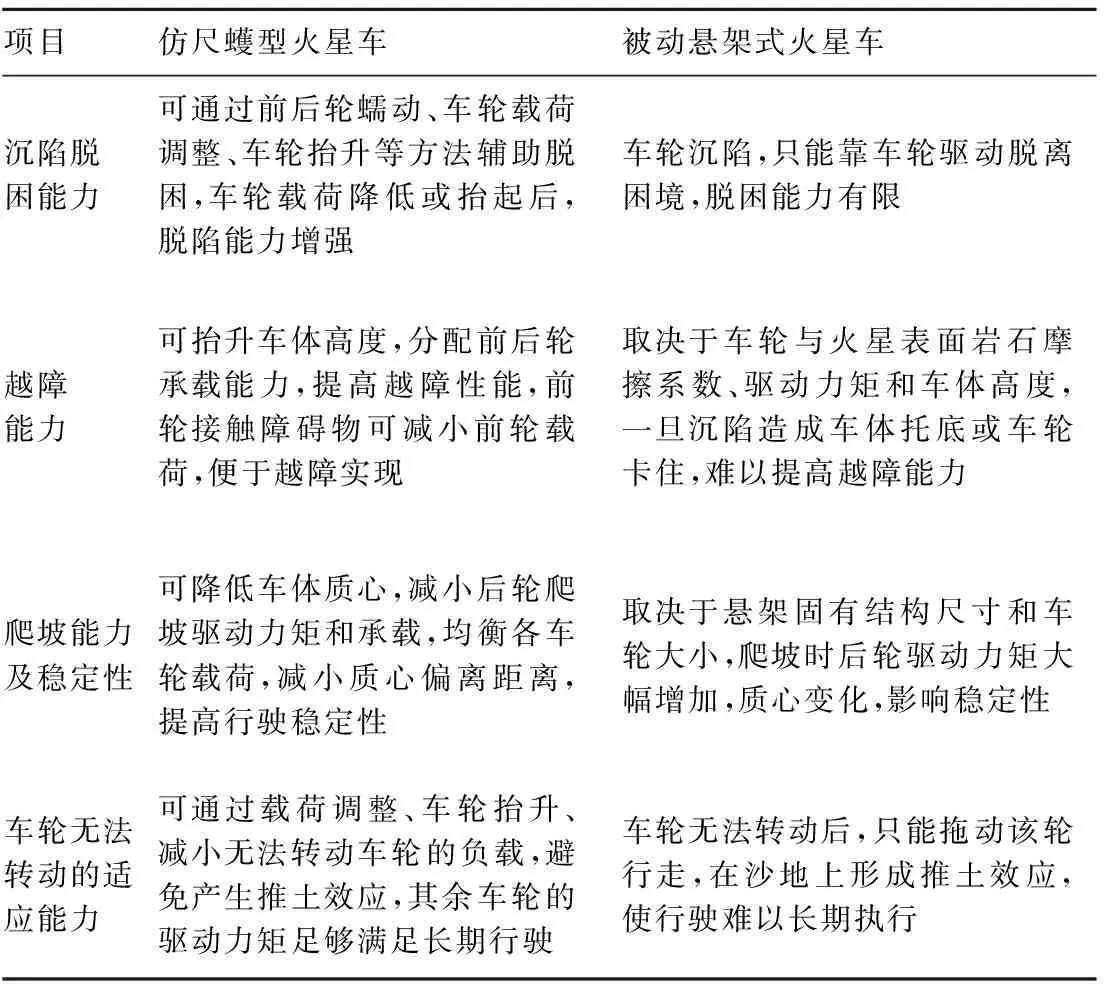
表1 仿尺蠖型火星和被动悬架式火星车性能对比Table 1 Performance comparison of the inchworm-like Mars rover and the Mars rover with passive suspension
2 仿尺蠖型火星车设计
2.1 移动系统关键参数识别
基于仿尺蠖型火星车工作的原理,仿尺蠖型火星车设计的首要工作就是设计其移动系统,如图7所示,悬架主要包括主前摇臂、主后摇臂和副摇臂。
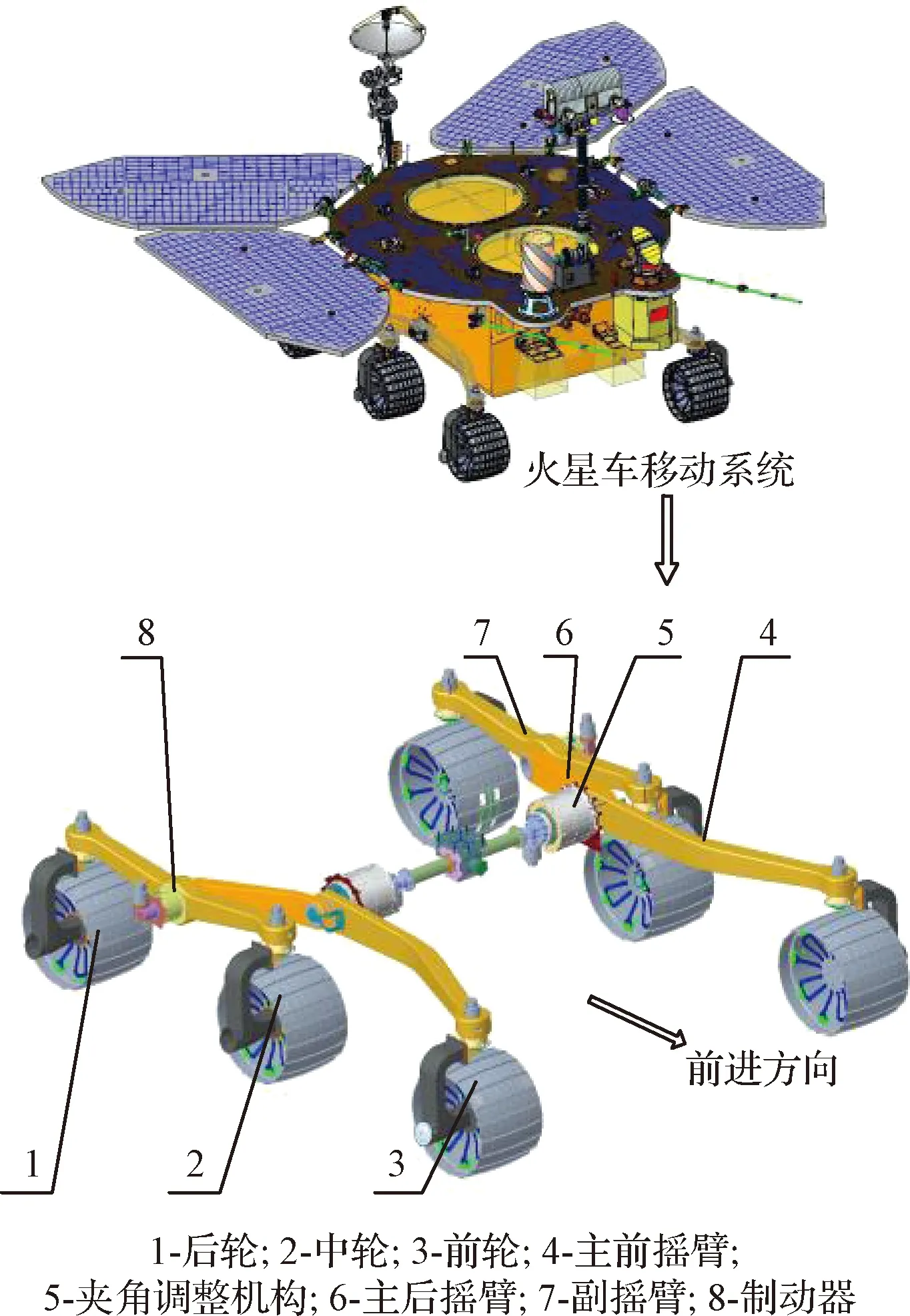
图7 仿尺蠖型火星车主动悬架示意图Fig.7 Schematic diagram of active suspension of the inchworm-like Mars rover
为了便于分析计算,将移动系统进行简化,简化后的移动系统如图8所示,火星车移动系统关键参数识别为:夹角调整机构轴线和前轮轴线的距离等效为主摇臂前半段,长度为;制动器和夹角调整机构轴线的距离等效为主摇臂后半段,长度为;假设制动器和中、后轮轴线的距离相等,等效为半段副摇臂,长度为;中、前轮和中、后轮轮间距和,前、后轮最外缘的距离为,主摇臂间夹角为,主摇臂后半段与水平线间夹角为,副摇臂间前后半段间夹角为。通过计算给出火星车在4种不同高度下的关键参数见表2。
图8 简化后的火星车移动系统关键参数Fig.8 Key parameters of the simplified locomotion system of the Mars rover
表2 不同车体抬升高度下移动系统关键参数Table 2 Key parameters of the locomotion system with different rover body lift heights
2.2 沉陷脱困设计
仿尺蠖型火星车最核心的特点是通过尺蠖运动,提高车轮的驱动力,实现沉陷的脱困。火星车尺蠖运动具体过程如下:车体从初始状态(车体高度300 mm)抬升,前轮不动,中轮和后轮同步向前转动,轮间距变小,中、后轮在主后摇臂和副摇臂的拉动下向前移动,如图9(a)所示;随后车体下降,前轮向前转动,中轮和后轮不动,前轮与中后轮的轮间距变大,前轮在主前摇臂推动下向前移动,如图9(b)所示,从而实现向前一个周期的移动。如此反复多次后,火星车将驶离沉陷区。
图9 火星车向前尺蠖运动过程图Fig.9 Schematic diagram of the forward inchworm motion process of the Mars rover
在车体下降和抬升过程中控制车轮旋转的顺序和方向,还可以实现火星车向后的运动,这是自然界尺蠖运动的扩展。过程为:车体抬升过程中,中、后轮不动,前轮向后旋转并移动,轮间距变小,如图10(a)所示;车体下降过程中,前轮不动,中、后轮向后旋转并移动,轮间距变大,从而实现向后一个周期的移动,如图10(b)所示。

图10 火星车向后尺蠖运动过程示意图Fig.10 Schematic diagram of the backward inchworm motion process of Mars rover
火星车通过向前或者向后的尺蠖运动就可实现脱离沉陷区,向前移动或向后移动主要根据火星车沉陷的情况和前、后方的地形特点确定。
2.3 爬坡设计和防托底设计
火星车针对爬坡的设计主要是降低车体高度,可以使前、中、后轮的载荷更加均衡,从而降低车轮的最大接地比压值,提高了爬坡能力,火星车最大爬坡角度可达20°,如图11(a)所示。
火星车针对托底的设计主要是提高车体高度,使车体的离地间隙增加,从而通过大型障碍物,火星车能越过的最大障碍物高度可达500 mm,如图11(b)所示。相较于被动悬架式火星车,通过性能提升了66%。
图11 火星车复杂地形工作状态示意图Fig.11 Schematic diagram of the working state of the Mars rover on the complex terrain
2.4 抬轮设计
仿尺蠖型火星车针对车轮无法转动的设计是抬起无法转动的车轮,不同车轮的抬轮策略不尽相同,首要的是进行质心的调整,抬升前轮时,将车体抬起,将质心后移;抬升中后轮时,将质心前移。抬轮高度0.3 m时,火星车的状态如图12所示,移动系统关键参数见表3。
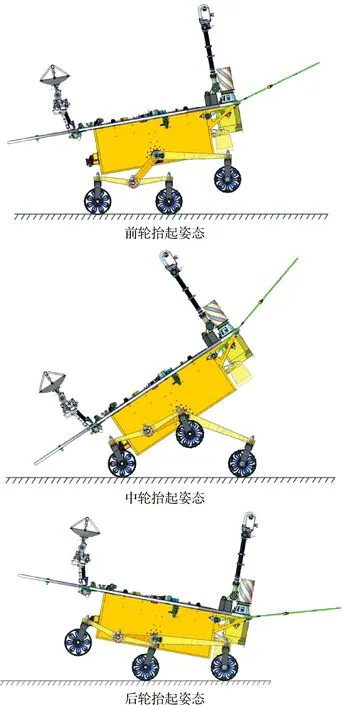
图12 不同抬轮状态火星车姿态示意图Fig.12 Attitude diagram of the Mars rover in different wheel lifting states
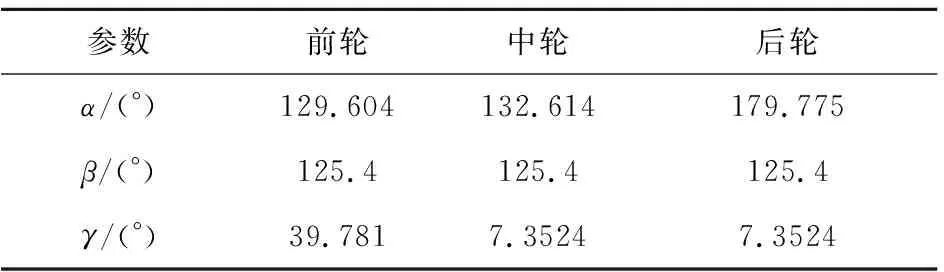
表3 不同抬轮姿态下移动系统关键参数Table 3 Key parameters of the locomotion system in different wheel lifting states
3 火星车设计验证
为了验证仿尺蠖型火星车设计的正确性,开展了地面试验验证和飞行试验验证。
3.1 地面试验验证
在内场开展了火星车地面试验,状态如图13所示,试验过程中火星车运动的位移曲线如图14所示,车体下降和抬升的高度如图15所示。两次运动的结果见表4,试验表明火星车具备尺蠖运动的能力,但移动速度较慢。
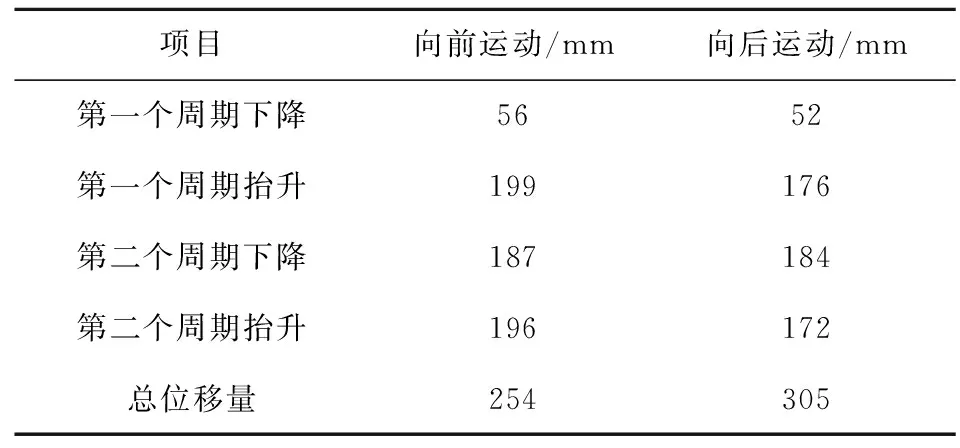
表4 地面试验中火星车尺蠖运动结果对比Table 4 Comparison of results of the inchworm motion of Mars rover in ground tests
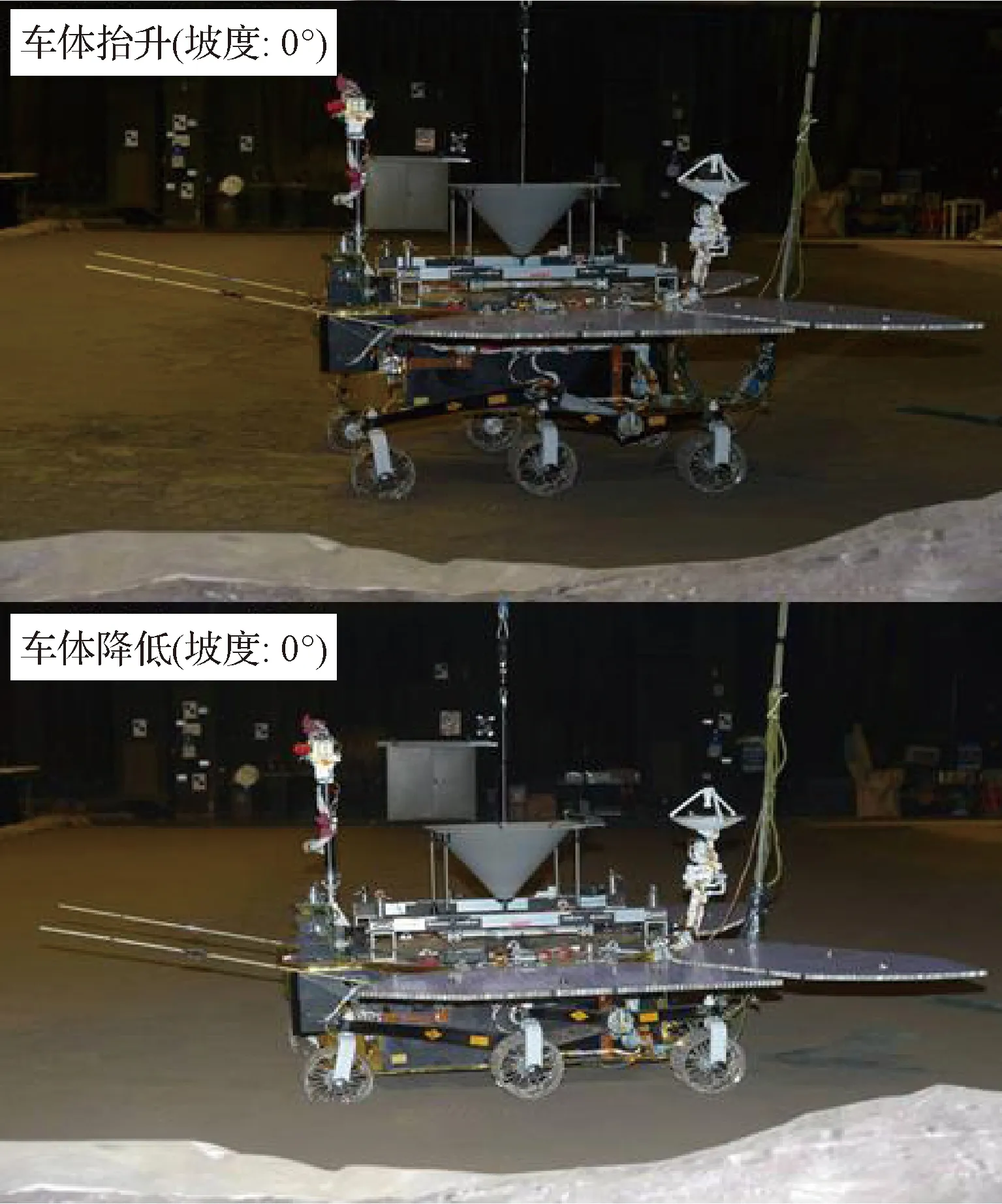
图13 火星车地面试验示意图Fig.13 Mars rover in ground tests
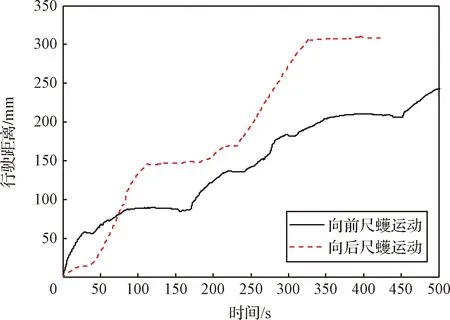
图14 火星车地面试验中尺蠖运动位移曲线Fig.14 Displacement curve of the inchworm motion of the Mars rover in ground tests
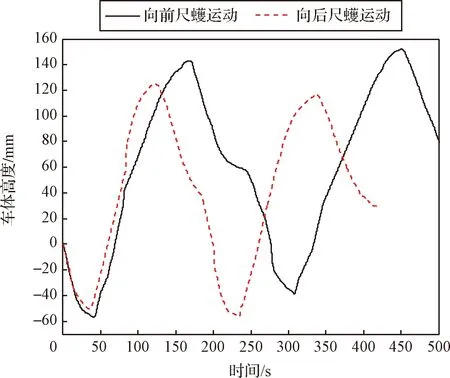
图15 火星车地面试验中尺蠖运动车体高度曲线Fig.15 Height curve of the inchworm motion of the Mars rover in ground tests
仿尺蠖型火星车通过了尺蠖运动的试验验证,还通过了抬轮和爬坡等功能的测试,如图16所示。地面试验全面验证了仿尺蠖型火星车主动悬架各项功能的合理性,表明火星车设计的正确性。

图16 火星车地面试验中抬轮和爬坡能力试验验证Fig.16 Verification of capability of wheel lifting and climbing of the Mars rover in ground tests
3.2 飞行试验验证
作为仿尺蠖型火星车应用的实例,“祝融号”火星车成功经历了飞行试验,已在火星表面顺利工作一个火星年,移动系统工作正常,各项遥测参数均在正常范围内,未发生异常现象,通过机构电流和角度等遥测信息可判断机构目前状态良好,如图17所示。
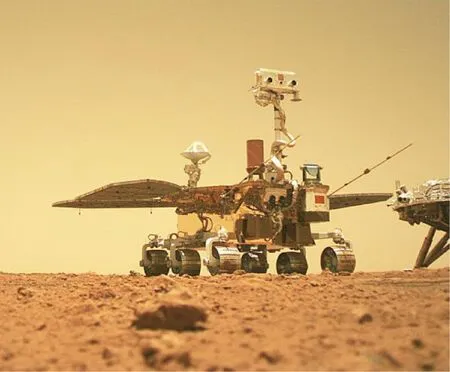
图17 火星车在火星表面工作状态图Fig.17 Image of the rover working on the surface of the Mars
飞行试验表明尺蠖型火星车设计措施有效。
4 结 论
1) 仿尺蠖型火星车可以有效地解决火星表面运动过程中遇到的车轮沉陷、爬坡、大型障碍物和车轮无法转动的难题;
2) 仿尺蠖型火星车通过尺蠖运动可以提高整车牵引力,当沉陷超过0.05 m时,牵引力提高超过80%;
3) 通过车体抬升,火星车可以通过大型障碍物,降低托底的发生概率,通过性能提高了66%。
