利用倾斜摄影测量的农村房屋信息调查
2022-10-13张静茹邱云飞方立沈慧芳周树东
张静茹,邱云飞,方立,沈慧芳,周树东
(1.辽宁工程技术大学 软件学院,辽宁 葫芦岛 125105;2.中国科学院海西研究院 泉州装备制造研究所,福建 泉州 362216)
0 引言
农村房屋信息作为反映土地资源利用和农民生产生活状况的基本数据,对数字化乡村建设、抗震性能分析、生态环境监测以及耕地保护等方面具有重大的价值和作用[1]。受地形地貌的影响,农村房屋具有坐落无规律、扩建翻新速度快、产权结构复杂等特性,造成了传统实地勘测测量难度大、测绘周期长、成本投入高、安全隐患多、房屋信息数据更新不及时以及测量与审批结果不符等亟待解决的问题[2]。因此,开发一套高精度、低成本、短周期的农村房屋信息调查方法具有非常重要的研究意义。
近年来,倾斜摄影测量技术迅猛发展,该技术能够全方位、多角度地获取地面物体真实的三维信息,并且成本低廉、数据获取便捷,在自然资源更新监测、城市建模管理等诸多领域都得到了广泛的应用[3-4],从倾斜摄影测量影像匹配点云中提取建筑物信息也成为研究热点[5-8]。但是,影像匹配点云中存在大量与房屋粘连的非建筑物点云,这些点云将直接影响建筑物点云提取效果,使得房屋信息计算精度低。为了减小非建筑物点的影响,戴玉成[9]在通过高程滤波滤除大量低矮点的基础上,利用植被反射波普特性训练机器学习模型对高大植被点进行剔除。此方法利用成熟模型可以快速、高效地进行植被点检测,但检测的结果依赖于模型的优劣,并且需要投入大量成本对数据进行标注。邓飞等[10]在去除地面点云后,通过对植被、建筑物点的灰度分布范围进行训练,使用单波段灰度值进行阈值分割剔除植被点云。该方法虽然能快速地剔除植被点云,但易将建筑物点云标记为植被点错误去除。余和顺等[11]根据过绿指数检测出点云场景中的黄绿色、绿色的点,并依据植被密集成块特性对颜色分类结果进行纠正,在去除植被点时能够有效保留部分建筑物且无需模型训练。但是,该方法使用单一植被指数易将建筑物点错误滤除,并且对于场景中存在的非绿色植被点无法有效检测。
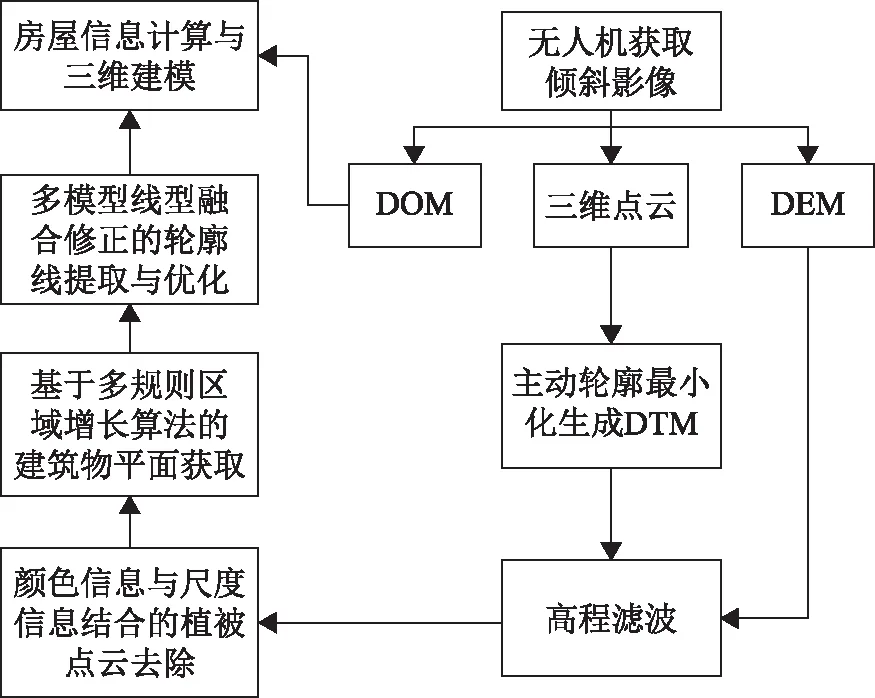
图1 农村房屋信息自动化调查的总体流程图
基于以上分析,本文面向倾斜摄影测量数据匹配点云,提出了一种点云颜色与尺度信息相结合的植被点云滤波方法,并将其与现有成熟技术相结合,形成一套完整的农村房屋信息自动化调查方案。如图1所示,信息自动化调查方案共分为5个环节:①无人机装载倾斜摄影系统采集数据,生成三维点云;②主动轮廓能量最小化算法模拟地面,生成数字地面模型(digital terrain model,DTM),利用高程信息进行高程滤波;③点云尺度与颜色相结合进行非建筑物点滤波,利用多规则区域增长算法进行平面分割;④针对不同类型房屋选取不同约束线组合提取房屋轮廓;⑤房屋信息计算。为了验证所提出方法的可行性,本文于武汉市新洲区施庙村展开试点研究。
1 数据获取与预处理
1.1 无人机影像获取
研究区位于湖北省武汉市新洲区施庙村(114°79′E,30°90′N),共采集了该区域内101宗地的162幢农村房屋影像数据。实验采用大疆多旋翼无人机,搭载5台1 820万像素的Sony WX RGB相机,从垂直和前后左右5个不同的方位视角采集影像数据,图像分辨率为4 896像素×3 672像素。表1显示了无人机的飞行参数设置。
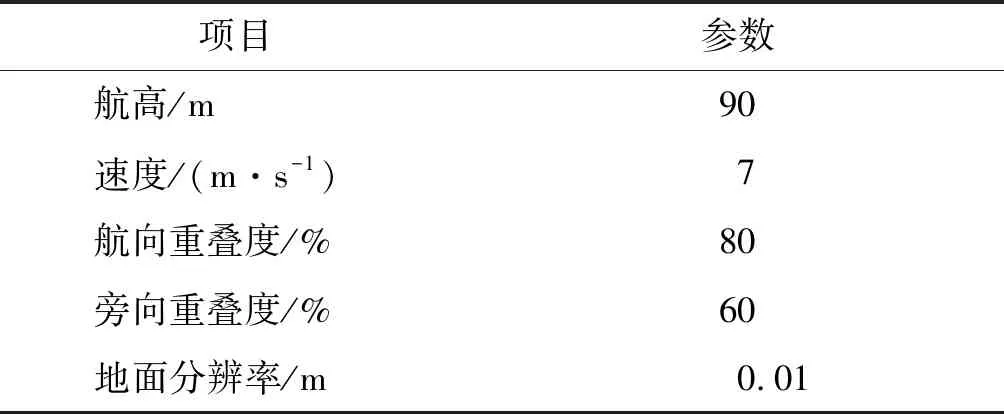
表1 实验区域航摄技术参数
由于飞行环境、相机参数和像控点布设同样影响影像质量和后续处理步骤,因此,飞行选择在光照恒定、气流平稳的天气进行。在飞行过程中检查影像清晰度以及漏测和错位现象以调整相机和航摄视角。像控点布设主要为平高控制点,1 km230个控制点,此外房屋屋顶也加入一定的控制点,最大限度保证了摄影质量。实验所使用的计算机运行环境如表2所示。
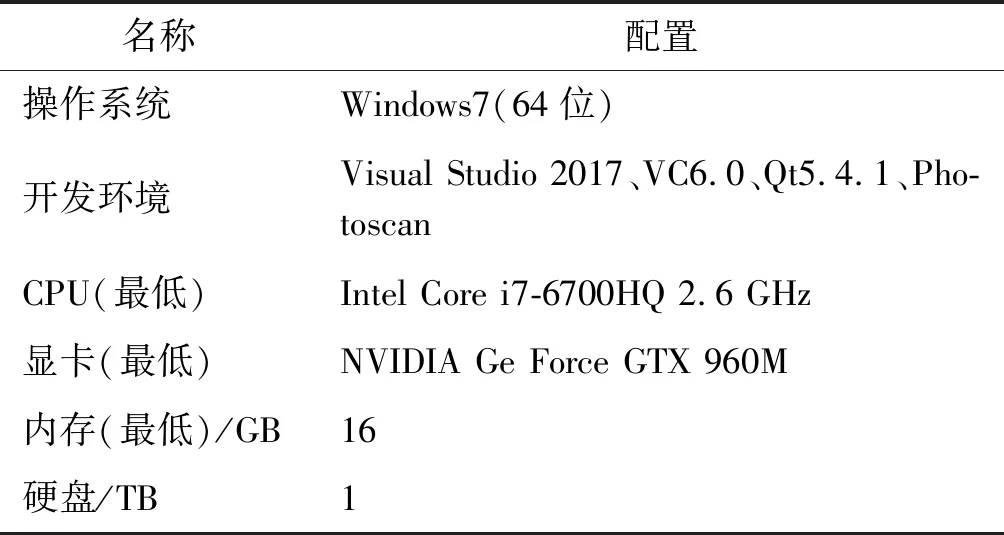
表2 计算机运行环境
1.2 影像预处理
无人机影像数据获取后使用商用软件包Agisoft Photoscan生成摄影测量数据:密集三维点云数据图、数字地表模型(digital surface model,DSM)和RGB真彩色航空数字正射影像图。图2显示了3种摄影测量数据的输出成果。

图2 倾斜摄影测量输出结果
2 研究方法
2.1 数字地面模型生成
为了获取精确数字地面模型,采用主动轮廓能量最小化算法对地表进行模拟[12]。基本步骤如下:将高密度三维点云网格化,取每个网格中的最低点作为样本点p,取p点的高度值得到一幅二维的高度图像Ip。对所有的样本构造一个主动轮廓模型,最小化主动轮廓能量函数得到对应的地面图像zp。在得到DTM后,结合高程信息对点云进行阈值滤波,过滤掉高程小于阈值的点。
2.2 非建筑物点云滤波
在高程滤波后,点云之中仍然存在高大树木、电线杆等非建筑点。为了减小非建筑物点的影响,提高建筑物点云提取准确率,提出了一种多属性融合的非建筑物点云滤波算法,通过点云的尺度信息与颜色信息结合去除场景中存在的非建筑物点云。具体实现如下。
设待测点Q的邻域点为Pi(i=1,2,3…,n),使用Q与Pi构建协方差矩阵H,求解可得特征值λ1,λ2,λ3。其中,λ1>λ2>λ3,所对应的方向向量分别为n1,n2,n3。其中,n1为点邻域的主向量,n3为法向量。本文采用局部尺度信息度量[13]进行尺度信息计算,可计算出待测点Q属于线性、平面与球形点的概率P1D、P2D、P3D。
由于在高程滤波后,极有可能将经过阈值滤波的平面点误认为是线性点标记,故多属性融合的非建筑物点云滤波方法基于以下规则对点的尺度进行划分。
1)P3D=max{P3D,P2D,P1D}的为球状点,Label=0;
2)P2D=max{P3D,P2D,P1D}的为平面点,Label=1;
3)P1D=max{P3D,P2D,P1D}<0.9,且n1平行地面的点为平面点,Label=1;
4)P1D=max{P3D,P2D,P1D},且Label≠3的为垂直线性点,Label=2。
其中,球状点多为冠状植被,垂直线性点为树木树干、电线杆等垂直于地面的物体,平面点多为建筑物点云。但由于倾斜摄影匹配点云密度较低,单一依赖于几何信息会造成结果不准确,故方法引入颜色相似性进行联合判断。在对颜色相似性进行计算时,需要先标定植被颜色信息。多属性融合滤波算法采用投票机制,对Label=0的点进行RGB信息投票,得票最高的颜色信息被标记为植被颜色信息,颜色的相似性根据以下规则进行度量。
1)点与植被颜色的相似性Sim1值大于阈值。
2)点的邻域平均颜色信息与植被颜色信息相似性Sim2大于阈值。Sim1、Sim2的计算如式(1)所示。
(1)
式中:R′、G′、B′为植被颜色信息;R、G、B为待测点颜色信息;Rran、Gran、Bran分别为各个通道上最大值与最小值的差。融合点云尺度信息与颜色信息的植被点概率计算如式(2)所示。
(2)
式中:Pv为待测点属于植被点的概率。对Pv大于阈值的点进行去除。此外,对于Label=2的点,将作为非建筑物点直接去除。
2.3 建筑物平面获取
在滤除非建筑物点云后,文中采用融合颜色信息的区域增长算法[14]进行平面分割,并为其添加约束规则,使其能够克服噪声点的影响,实现高效平面探测。多规则约束的区域增长算法首先从所有Label=1的点中随机选取一点作为种子节点i,选取其半径R内的点作为邻域点j,基于以下规则进行区域增长。
1)Labeli=Labelj=0,点的颜色相似;
2)Labeli=Labelj=1,且法向量夹角小于阈值,点的颜色相似。
在得到初始平面后,对所有平面的点数进行阈值判断,若区域内点数小于一定阈值,则此区域按照噪声点去除;若大于阈值则利用空间一致性分析对离散的平面和点进行聚类融合,以获得空间上连续的平面区域。
2.4 屋顶轮廓获取
屋顶轮廓线提取是三维建模与房屋信息计算的关键步骤。虽然不同地区的房屋构成会具有显著差异,但是房屋信息的计算主要依赖于屋顶投影的计算,并且同一区域房屋多为一种类型。一般来说,住房屋顶可分为平顶型和多面型两种,针对不同房屋类型,采用多种特征线组合策略进行房屋轮廓提取。其中,不同特征线来自不同数据源。
采用多源数据可以有效克服从单一数据源进行提取存在的轮廓线缺失问题,在进行区域轮廓线提取时,依据地域特点人工选择合适多源特征线组合同样可以有效提升计算效率。对于平顶房,采用房屋立面投影线与高程急剧变化的边界线融合策略;对于多面型房屋除两种基础的线型外,需要添加不同平面的相交线进行辅助修订。上述3种特征线定义如下。
1)房屋立面的投影线。房屋通常可以认为是由多个垂直于地面的墙立面和屋顶组成,房屋立面在地面上的投影线轮廓即可视为房屋的外围轮廓。对比于屋顶轮廓,由于立面投影线可去除屋檐等延伸部分的影响,在计算房屋面积等信息时,该轮廓的可靠度高于屋顶轮廓线。
2)高程急剧变化的边界线。DSM模型包含了地面上各种物体,由于房屋多为高大地物,则屋顶边界与周围地物具有较大的高程差。基于这一客观事实,根据DSM生成像元值代表高程变化的梯度图像,利用最小像元值和最短线长原则检测出高程急剧变化的边界线作为轮廓修正因子,对投影线中存在的缺失进行补充修正。
3)不同平面相交线。对于多面型房屋,其不同平面的相交线和房屋2D轮廓线连通,且平面相交线之间往往具有对称性,故可以使用不同平面相交线对缺失的2D轮廓进行补充修正。
图3显示了人字形屋顶轮廓线提取流程,图3(d)、图3(e)、图3(f)分别为该区域高程急剧变化的边界线、不同平面相交线与房屋立面投影线。将上述3种轮廓约束线融合在统一模型中得到图3(g)。由于直接融合后的线仍有缺失、不规则现象存在,故需要对缺失线条进行填补,并通过搜索成对相交点,按照最小化多边形周长的原则构造一个整体的屋顶轮廓多边形。正则化后的轮廓线如图3(h)所示。
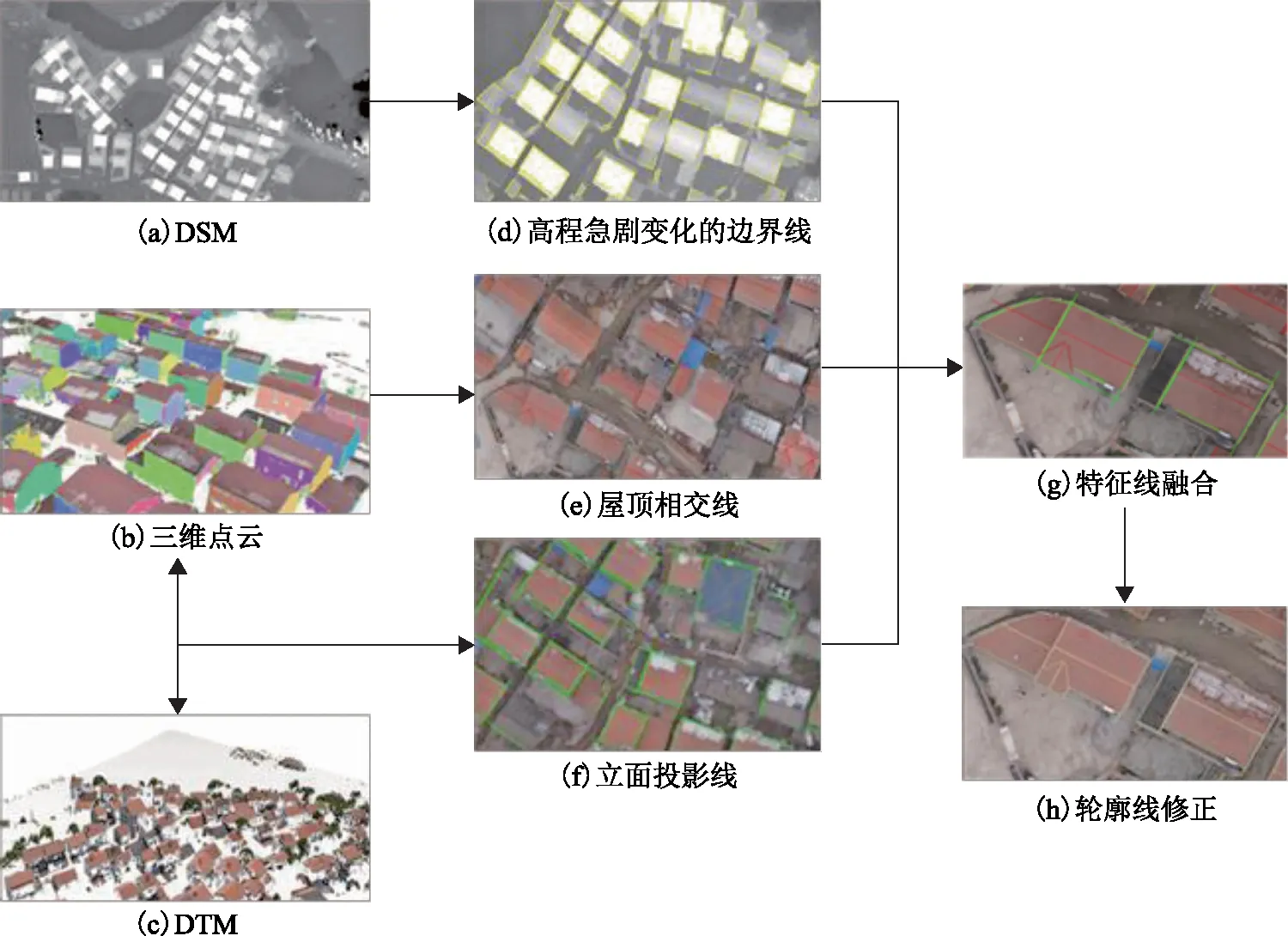
图3 屋顶轮廓线提取流程
2.5 房屋信息统计和模型导出
楼层信息通过屋顶高度和研究区域内平均楼层高度进行估计;房屋总建筑面积通过屋顶的平面投影面积和楼层数计算得出。建筑面积计算如式(3)所示。
S=S1+S2+S3
(3)
式中:S1为不包含阳台和隔热层的各楼层主体面积;S2为阳台面积;S3为高度超过2.2 m的隔热层面积。房屋的二维模型为一组屋顶外围轮廓的边界多边形,主要导出格式为Shapefile。三维模型为包含屋顶和墙面在内的建筑模型,对于不可见的墙体,根据屋顶轮廓和楼高外推获取,主要导出格式为DXF。
3 算法分析与试点研究
3.1 非建筑物点云滤波
图4显示了多属性融合的非建筑物点云滤波方法与单波段阈值分割法、过绿指数植被滤波的效果对比。如图4(a)所示,由于光照等因素影响,由倾斜摄影测量数据生成的点云存在阴影遮挡、植被颜色差异较大等问题。图4(b)为使用单波段阈值分割的结果,在利用单波段阈值分割进行植被点去除时,由于方法仅依赖于单一信息对于阴影点无法去除,同时遗留大量噪声。图4(c)为具有修正的过绿指数法,该方法对比于以往过绿指数法增添了几何校正,对于离散的判断出错的植被点可以很好地去除,但是对于色差较大且密集成块的植被点云滤波效果较差。多属性融合的非建筑物点云滤波效果如图4(d)所示,得益于方法考虑尺度与颜色信息,对比其他方法表现出了良好植被点滤波效果。并且对于在密集匹配过程中产生的与植被颜色差异较大的点,也能较好地检测去除。但是,在经过高程滤波的点云中除高大植被外可能还会存在树干、电线、信号塔、太阳能等处于高处的非建筑物点,本文方法虽然可以结合颜色与几何信息进行植被点去除,但在进行其他非建筑物点去除时,只能单一依靠形态去除电线杆等线状非建筑物点,如图4(d)所示,本文方法对于太阳能板、高大院墙等具有平面性质的点无法有效去除。
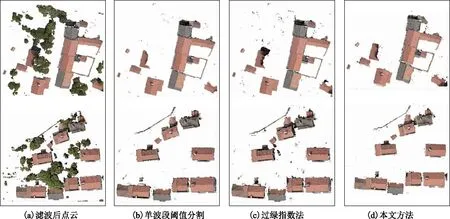
图4 植被点云去除实验
同时,进行无监督信息的点云滤波,滤波的结果决定于点云自身性质。由于光照、遮挡物、点云密度不均匀、稀疏等问题,直接从点云中获取的颜色、局部信息并不完全可靠,虽然本文方法选用颜色与尺度信息结合的方式进行分类,降低了依靠单一信息错误分类的可能性,但在地物组成多、植被类型多样、房屋结构复杂的地区仍无法保证分类结果的准确性。
3.2 建筑物信息提取
为了探究房屋信息提取方法在具有复杂结构的房屋中的适用性,在由瑞士公司senseFly提供的瑞士测区倾斜摄影测量数据上进行房屋信息提取。图5(a)为该测区去除非建筑物点的部分点云;图5(b)为在进行平面探测、空间聚类后的点云;图5(c)为在多面型房屋轮廓提取方案下的房屋2D轮廓线。结果表明,对于确定的屋顶平面,本文方法可以较好地从中提取出轮廓信息,在屋顶平面缺失时也能很好地补全。但在建筑物分割时,由于存在两栋房屋共用一墙的复杂房屋,单凭计算机无法准确判断其是否为同一栋房屋,故在空间聚类时可能会出现错误,对于此类错误需要人工考察,或了解当地建筑特色后做出人工决断。
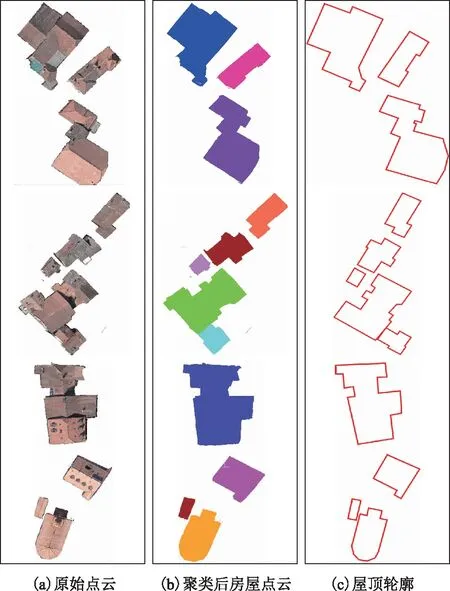
图5 建筑物屋顶轮廓提取
3.3 试点研究
在位于施庙村的试点研究中,共进行两轮调查,第一轮获取房屋影像数据,第二轮进行实地调研获取房屋实际信息。在进行数据处理时,据《房产测量规范》规定,在房屋面积测量时只统计总高度高于2.2 m的房屋,故本文将高程阈值设置为2.2 m。试点数据高程滤波结果如图6(a)所示,滤波后场景的主要组成为建筑物点云与植被点云。图6(b)显示了植被点概率计算结果,红色为高概率植被点。在进行植被点云滤波后,场景中仍旧存在高大院墙,高大院墙在计算时容易被误判为墙立面,故在实验时设定的一组平面组件中,其中一个平面拥有3个以上的相邻平面,且至少有两个平面的法向量的夹角与该平面的夹角在85°至90°之间,则认为该平面为房屋立面。图6(c)为建筑物平面分割结果,根据平面法向量方向的不同可将探测后的平面划分为立面与屋顶。图6(d)为从多源数据中提取的3种轮廓约束线。如图6(e)所示,在提取出房屋轮廓后,可根据房屋轮廓信息进行大规模三维建模,三维模型为包含屋顶和墙面在内的建筑模型,对于不可见的墙体,根据屋顶轮廓和楼高外推获取,主要导出格式为AutoCAD DXF。房屋的二维模型为一组屋顶外围轮廓的边界多边形,将其与正射影像图叠加输出,主要导出格式为Shapefile,导出结果如图6(f)所示。
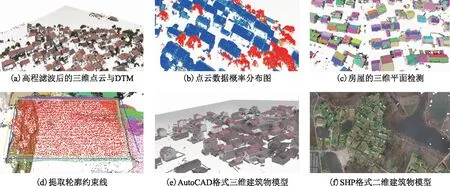
图6 施庙村试点房屋建筑信息提取
在此次施庙村房屋实地调研中一共提取出162幢房屋,与在实地调查中共调查到158幢房屋对比,其中有3幢房屋是由于两次调查时间较久而新增的房屋,1幢房屋为实地测量漏检房屋,故本文方法可以探测到该区域内的所有房屋平面。但探测到的房屋之中存在房顶脱落、墙面倒塌等破坏房屋,自动化方法无法精确捕捉,其中破坏房屋共有16幢。
为了对建筑物信息提取的效果进行定量分析,对提取到的142幢完整房屋信息计算其平面投影面积信息,并与实地测量的房屋投影面积进行对比,通过房屋在限差以内的房屋占比、平均面积计算精确率、召回率、优质率对方法进行评估。同时与文献[9]中提出的基于倾斜摄影测量的城市建筑物信息的方法对比。
其中,其限差E计算如式(4)所示。
(4)
式中:S为实地测量的真实房屋建筑面积。计算误差在限差以内的房屋记为合格。具体评估结果如表3所示。

表3 房屋信息调查定量评估 %
表3表明,本文方法在试点房屋调查中平均精确率可达99.24%,房屋占地面积数据误差在限差以内的房屋数量在总房屋数量中占比88.74%。图7显示了限差与误差情况,部分房屋误差远大于限差,为了分析产生原因,对误差值较大的房屋进行提取分析,发现误差较大的房屋是由于隔热层还有阳台的面积统计出错而引起的。在试点房屋中,部分阳台采用玻璃围护,因此无人机相机无法充分捕捉其颜色和纹理属性,造成点云信息缺失,无法提供充足的边界重建信息,造成漏检现象。
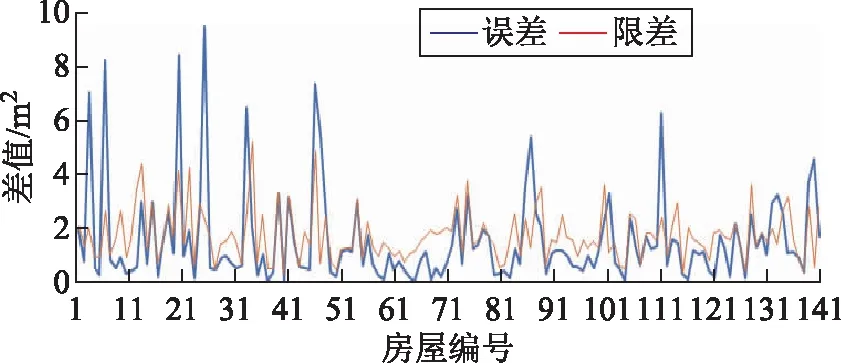
图7 房屋占地建筑面积的误差与限差分布
此外,高程滤波去除了低于2.2 m的点,对于铺设隔热层的低矮建筑,进行滤波且去除非房屋点后信息缺损严重,无法精确提取,同时隔热层阻挡了房屋立面信息获取,造成了房屋主体面积计算误差。在去除阳台与隔热层的统计后,房屋合格率上升至91%,且房屋主体误差超过限差的部分不超过1.5 m2。因此,本文方法在房屋信息计算方面是准确有效的,具有一定的实用价值。
4 结束语
本文提出了一种基于无人机倾斜摄影测量数据的农村房屋信息自动化调查方案,该方法结合无人机倾斜摄影测量与自动化成图等技术,对农村房屋进行数据收集、轮廓提取和面积计算,实现了从原始航空影像到二维和三维模型的自动输出。与传统的实地测量的农村房屋信息调查方法和激光扫描的测量方法相比,基于影像的三维信息自动化处理方法在时间和成本效益上取得了很大的提升。算法上,在进行建筑物点云提取时,本文提出了一种多属性融合的植被点去除方法,通过点的尺度与RGB信息结合快速高效地去除非房屋点云,利用基于点属性的区域增长算法,准确地提取出房屋平面信息;在轮廓提取时,采用多线型融合最大限度还原屋顶轮廓,为三维精细重建与房屋信息计算提供良好基础。实验成果上,提供AutoCAD、ArcGIS等软件的数据格式,方便进行数据处理和分析。
