电力多旋翼无人机巡检控制系统的设计与实现
2022-10-12王俊平
王俊平,徐 刚
(1.湖北职业技术学院机电工程学院,湖北 孝感 432000;2.湖北工程学院机械工程学院,湖北 孝感 432000)
1 引言
社会发展的特点之一是不断增长的能源消费,特别是在经济快速发展阶段电力消费随之增长。高压输电线路作为电力发电、输电和配电的中间环节,对电网的整体性能有着重要的影响。电力机构为控制输电过程的性能指标而采用的维修方法包括无人机、徒步巡检、攀爬机器人以及有人驾驶飞行器。在徒步巡检中,通常由两个人组成的队伍从一个塔走到另一个塔进行电线路检查。目视的线路检查是在双筒望远镜的帮助下进行的,有时用红外(IR)和探测相机进行检查。该检测手段非常准确,检测人员可以从地面上很好地看到电力线设备的表面情况。但是考虑到全国的地形差异,穿越公路的人员流动输电线路的巡逻并不容易。因此,传统线路检查存在缓慢、单调、主观的缺陷。
四旋翼是一个四螺旋桨交叉配置的机电一体化系统。前后电机顺时针旋转时,左右电机逆时针旋转,几乎抵消了陀螺效应和调整飞行时的气动动力力矩。与传统直升机相比,四旋翼的另一个优点是简化了旋翼力学。
通过改变单个电机的速度,可以改变升力,从而产生垂直和/或横向运动。俯仰运动是由前后电机的速度差产生的,而横摇运动则分别由左右转子的速度差产生。偏航旋转是由于每对转子(前后和左右)的反力矩不同而产生的。总推力是四个单转子产生的推力之和。所有的传感器和信息处理单元都嵌入到四旋翼中用于控制目的,以实现无人机的自主操作。然而,尽管其有四个执行器,但四旋翼是一个动态不稳定的系统,必须由一个合适的控制系统来稳定。除了功能复杂性之外,算法还必须在嵌入式硬件中实现,并且必须满足实时需求,同时必须考虑有限的内存和板载处理能力。许多控制系统是基于线性化模型和传统的PID控制。
无人机(UAV)这一新兴技术在电力线路检测方面变得更加经济实用。这里中提出了一种多平台旋翼无人机系统和多模型通信系统,并将其用于中国高效的电力线检测任务。对四旋翼无人机的力平衡、运动控制进行了详细的介绍。不同的无人机协同工作,可实现远程成像、近距离成像和通信中继。将高质量的图像/视频实时传输到无人机导航现场控制站和远端办公室进行分析。根据三个节点法的温度参数判断其有无故障。事实证明:旋翼无人机检测比传统的检测方法具有更高的效率。
2 电力旋翼无人机巡检系统
2.1 系统机构特点
四旋翼无人机的运动是通过改变四个转子产生的升力来控制的。与传统四旋翼无人机不同,这种四旋翼无人机可以通过改变转速、叶片迎角(俯仰角)和循环俯仰角来改变升力矢量的大小和方向。
螺距角是固定的,因为转子是由柔性塑料制成,空气阻力扭曲造成螺距角的变化。因此,升力是四个转子转速之和的函数,而转矩是它们的差值的函数。四旋翼无人机有四个输入力产生六个自由度的运动,且无线电控制器的操作人员有四个控制机构:油门(电机转速)、横摇、俯仰和偏航。
为了满足电力线检测的需要,从零开始研制了四旋翼,其组成成分为:微处理器、惯性测量单元(IMU)、GPS、自动驾驶仪、高度计和通信系统。根据任务模式不同,将四旋翼飞行控制器飞行执行模式分为手动飞行、GPS定位和GPS导航。
四旋翼无人机基本结构,其旋转动力学满足反馈形式,姿态控制器可以通过反推技术设计,如图1所示。但是,该方案中解析虚拟控制变量的过程非常复杂,对反推技术的实际应用带来阻碍。直接提取角速率微分命令信号的方法,能够降低对分析模型的依赖。利用姿态控制器可以降低信号扰动误差,确保四翼无人机具有较好的跟踪能力。

图1 四旋翼无人机结构Fig.1 The Quadrotor UAV Structure
2.2 电力旋翼巡检
四旋翼机构是高度非线性的欠驱动系统,最佳模型包括推进组的旋转以及空间旋转带来的陀螺效应。四旋翼动力学的方程可以在参考世界固定坐标系EE中表示为:


式中:XE=[x,y,z]T—四旋翼机器人的绝对位置和Θ=[ψ,θ,φ]T由欧拉角表示的姿态。
针对四旋翼航空平台,电力线检测中常见的飞行轨迹,如图2所示。

图2 四旋翼用于电力线检测飞行轨迹图Fig.2 Flight Trajectory Diagram of Quadrotor for Power Line Detection
此外,四旋翼无人机配备了视觉采集系统,飞行时拍摄的视频传输到GCS(地面控制站)进行图像处理,为用户提供更优质的服务。
2.3 地面控制站
在飞行过程中对四旋翼的监测是该项工作的一个重点。GCS操纵多个无人机飞行并提供了图形用户界面,如图3所示。

图3 PC机地面控制站示意图Fig.3 Schematic Diagram of PC Ground Control Station
GCS软件主要负责监控和向直升机发送数据,管理飞行计划和任务,无人机和显示无人机的仪表通过远程手动控制。PC机GCS图形用户界面中,PC地面站通过无线电调制解调器接收包含GPS位置、高度和姿态数据的飞行器的遥测串。此外,GCS还有一个友好的用户界面,用于设置飞行路径任务。
3 四旋翼运动控制
四旋翼无人机实现快速稳定飞行需要精确的控制,且具有高度耦合的动力学:一个转子的速度变化导致至少3个自由度的运动。由于左右升力的不平衡,降低右旋翼的速度会导致四旋翼无人机向右滚动。左右电机对和前后电机对的扭矩不平衡,会导致四旋翼无人机向右偏航。滚动将导致四旋翼无人机向右平移,因为旋翼的力现在既指向左下方,也指向右下方。当转子转动时,它受到空气阻力的阻力,空气对转子的反作用力产生一个称为感应力矩的反作用力。感应力矩作用于转子的方向与转子相反。传统四旋翼无人机使用尾桨抵消主旋翼的感应力矩。左右对电机和前后对电机反向旋转,产生反向旋转扭矩。
3.1 旋翼无人机力平衡
实现力和扭矩平衡,当没有任何程度的净力时,它会悬浮在空中。最小的力将导致线性加速度(牛顿第二定律f=ma)和最小的扭矩将导致角加速度(ρ=Iρ)。当四个转子的推力之和等于四旋翼无人机的重量时,就可以实现稳定悬停的力平衡,如图4所示。

图4 旋翼无人机力平衡示意图Fig.4 Schematic Diagram of Force Balance of Rotor Drone

式中:0、1、2、3、4—中心、前、右、后、左的受力。
运动受到重力、惯性和空气阻力作用。重力与垂直运动相反,它会消耗相当大的能量使四旋翼无人机保持在空中。由于其在运动时没有气动面产生升力,所以所有升力都是由转子产生的。四旋翼无人机能在空中停留的时间是由转子的升力系数和电池的重量之间的平衡性决定的。
惯性与线性和旋转加速度相反,有助于稳定运动,且电动机质量引起的惯量抵抗角加速度。通过定位四旋翼无人机空气动力中心以下的重心(将电池放置在机身交叉点以下),电池质量引起的惯性可以抵抗俯仰和横摇。
空气阻力可为直线和旋转运动提供阻尼,阻力与速度成正比,除了与转子旋转方向相反的阻力外,阻力都很小。因此空气阻力对转子速度提供阻尼,从而减缓了四旋翼无人机对外力的响应。
3.2 四旋翼运动控制
在多旋翼四旋翼无人机的情况下,控制计算每个螺旋桨转速,以产生所需的总推力T和力矩,分别为横摇、俯仰和偏航、L、M、N。考虑到有n个旋翼的四旋翼无人机的实际情况,其中每个电机的i(i=1,2,···,n)。

定义:

很容易验证:Tmin≤T≤Tmax
系数μ和κ分别表示螺旋桨产生的推力和偏航力矩,臂长为l。无人机,如图5所示。需要进行四个电机的转速计算。
对于图5 所示的四轴四旋翼无人机,需要计算四个电机转速。螺旋桨速度计算表示为Ωc=A-1vc。螺旋桨转速与矢量v之间的映射矩阵A表示为:
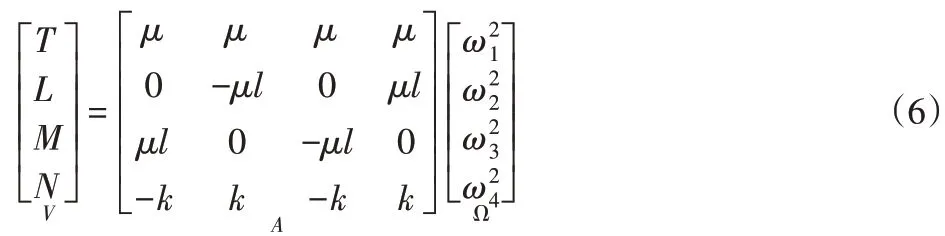

图5 四旋翼无人机配置Fig.5 Quadrotor UAV Configuration
4 旋翼机器人视觉系统
4.1 视觉系统
旋翼机器人视觉系统由TIR摄像机和彩色摄像机组成。视频发射器将图像发送到全球坐标系(Global Coordinate System,GCS)。该方案,如图6所示。

图6 视觉系统方案Fig.6 Vision System Scheme
利用视觉算法进行图像处理,为电力线的节点定性检测奠定基础。检测盒接头相对温度密切关联,温度增加会导致节点处电阻率增加。所以,通过节点温度监测,即可完成电力线的定性故障诊断。节点的温度必须位于图像的空间位置,首先剔除背景,将电力线节点置于图像前景,其次比较三个节点的温度。如果节点温度相同,则无故障,如果温度不同,则判定有故障。检测算法,如图7所示。
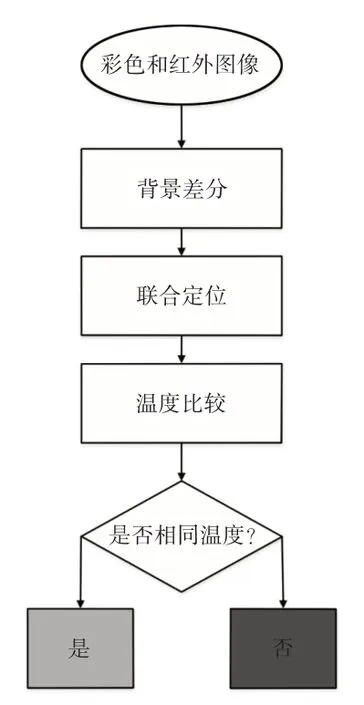
图7 定性检查视觉算法流程图Fig.7 Qualitative Anspection Visual Algorithm Flowchart
如果从定性检测中发现故障,则可以确定电力节点的准确温度。然而为了满足定量检测的要求,还需要进行进一步的开发和传感器融合。从TIR摄像机中获取反射温度,要准确评估真实温度必须同时考虑风速、温度等环境变量。
4.2 背景剔除
由于离电力塔较近,电力线接头属于红外图像的前景,视觉算法的第一步是从图像中去除背景。通过一个立体标定系统(TIR相机+彩色相机)并基于OpenCV库进行校准,允许从环境中检索三维信息,所以可以丢弃背景。原始图像(颜色和IR)和生成的前景图像,如图8所示。

图8 红外图像-背景剔除实验结果Fig.8 Infrared Image-Background Removal Experiment Results
4.3 节点定位
一旦背景从图像中去除,必须找到电源线的连接点。由于系统的电气性质,电力线的节点温度最高,可在图像中定位热点相当于定位电力线的节点。让Φ()x,y为红外图像的前景,从前景得到的最大和最小温度分别为:

Γ={(a,b)∈a×b|0 ≤a<w,0 ≤b<h},其中w和h分别为图像的宽度和高度,单位为像素。得到热点的初始图像为:


式中:Z—8×8的邻域掩模,C(x,y)—约束图像,定义如下:

递归操作被递归地实现,直到当(x,y)=Ψk(x,y)=Ψk-1(x,y)时达到稳定图像。(x,y)中的每个连通区域代表热点,最后将获得每个热节点的温度平均值进行比较。视觉算法的最后一步是定性检查,如果从电线节点获得的温度(从前一步骤中的热点检索)是相同的,则没有故障。如果存在差异,则存在潜在故障并且必须调查电力塔。从TIR 图像获得的热点的示例,如图9所示。

图9 视觉算法热点检测结果Fig.9 Visual Algorithm Hot Spot Detection Results
5 旋翼无人机在电力巡检应用
5.1 神经网络速度控制
这里提出的一种用于四旋翼控制的嵌套结构,该结构为了达到和保持一个期望的速度矢量,必须稳定无人机的姿态。因此提出了一个外环速度控制和内环姿态控制的控制系统分解。在这种结构中,内部的姿态控制回路必须比外部回路快得多,并稳定外部回路控制所需的角度。该嵌套结构,如图10所示。

图10 无人机四旋翼控制的嵌套结构Fig.10 Nested Structure of the UAV Vehicle Control

由于向量函数f的复杂性,不可能将反函数作为闭合数学表达式来获得,因此在神经网络的帮助下实现逆f-1。简化神经网络的训练:为了实现任何期望的速度矢量,可以设置x11d=ψd=0,该处理不必应用偏航旋转。
在下一步中,选择了合适的神经网络类型,内部结构和学习算法,且这里使用多层感知器作为前馈神经网络。输入层中的20个神经元,隐藏层中的20个神经元和输出层中的4个神经元最终取得了令人满意的结果。采用Levenberg-Marquardt反向传播算法进行实验,实验表明1000个输入和输出数据集足以训练所选择的神经网络,其能够实现所需的反函数f-1。各个输入变量的变量x7d的前100个数据点和由神经网络计算的相应值的示例,如图11所示。
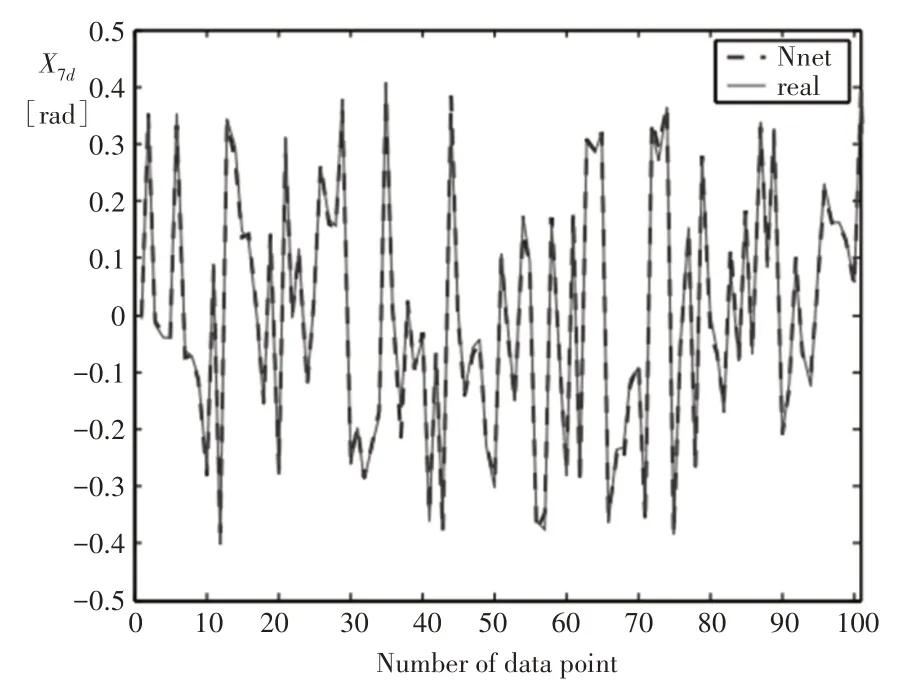
图11 训练神经网络的示例结果Fig.11 Example Results of the Trained Neural Network
5.2 旋翼飞行仿真
开发一个为模型评估提供测试平台的飞行模拟器,如图12所示。模拟器采用Java4GL编写,模型的所有参数都存储在XML文件中。

图12 飞行模拟器、顶部环境、底部模型参数设置Fig.12 Flight Simulator,Ttop-Environment,Bottom-Model Parameters
测试平台已经对所有的参数进行了初始测量,但是为了获得更精确的测量,仍然构建了一些测试例。
当使用模拟器时,让模拟的飞行器停止上升或下降是很困难的,要让它悬停在一个高度,必须调整油门,直到z方向的速度和加速度都为零,一旦发出任何其他命令,它又开始上升或下降。
5.3 电力巡检实验
实际四旋翼机器人飞行情况,如图13所示。可以看出高空飞行效果非常稳定,控制算法鲁棒性良好。

Fig.13 Actual Flight Test Diagram.
6 结论
基于四旋翼直升机的无人机对电源线节点进行巡检具有效率更高、成本更低、更安全的特点。多旋翼无人机在建筑设计、物流工程领域有很好的应用,应用深度和范围都不断扩展。
这里提出了一种基于组合控制策略的小型四旋翼无人机四旋翼控制系统,其包括四旋翼无人机力平衡、运动控制和惯量。同时电力多旋翼无人机巡检控制带有视觉系统,可以检测电线节点是否有问题。这里开发了内环姿态控制器和外环速度控制器,并在Matlab/Simulink仿真模型中导出和实现了四旋翼飞行器的动态模型。借助该仿真,对非线性四旋翼控制系统进行了测试并证明了其效率。仿真结果表明该方法的正确和有效性,这里的轨迹跟踪控制策略能有效控制无人机,飞行轨迹误差可以控制在0.2m的范围内。
在未来的工作中,分配方法扩展到多螺旋转子,并实现螺旋助推效率的在线分析,同时研究控制重新分配变量的相关问题。
