一种消除DOM变形拉花的新方法
2022-10-11黄秋影何红梅吉初云陈善弟
黄秋影 何红梅 吉初云 陈善弟
(1. 自然资源部第四航测遥感院, 海南 海口 570203;2. 海南天涯人力资源管理服务有限公司, 海南 海口 570203)
0 引言
“十四五”时期地理信息管理工作将紧紧围绕“两支撑、一提升”工作定位,全面促进地理信息产业发展,为支撑经济社会发展和自然资源管理提供更高质量的地理信息保障和服务。而数字正射影像(digital orthophoto map,DOM)在地理信息监管、自然资源管理中作为基础底图,发挥着重要作用,为快速、大范围和长时间序列的自然资源管理提供可能。
随着亚米级卫星影像的纠正变得越来越普遍。如何有效提高DOM质量,特别是图面质量,并将其应用于1∶5 000或者更大比例尺的测图中,成为当前正射影像纠正中必须解决的问题。DOM质量的好坏直接关系着各种地理要素的正确解译,在位置精度满足规范要求的基础上,图面质量是影响解译的重要因素。图面质量通常表现为地理要素的变形拉花。
为解决DOM变形拉花的问题,国内外诸多学者开展研究。文献[3-6]采用DEM平均高程纠正DOM(方法一),解决了立交桥、叠桥、山区、高架公路、高架铁路等要素的局部扭曲问题,但降低了作业效率。文献[7-8]提出采用不同格网间距数字高程模型(digital elevation model,DEM)纠正DOM(方法二),解决桥梁、道路和山区高分辨率正射影像扭曲变形,但未能进一步提高消除变形的数量。文献[9-10]提出采集路面或桥面的真实高程(方法三),解决扭曲错位的同时保证了区域正射影像的精度,但未考虑扭曲错位区域两侧被遮挡地物的处理。
针对上述三种方法存在的问题,提出兼顾全局DEM,能适应不同星源和不同地形类别,基于DEM格网抽稀和平滑滤波协同处理的新方法。达到DEM一次处理,持续使用,批量消除大部分不同侧摆角拍摄的DOM的变形拉花。
1 基于有理函数模型的卫星影像正射校正及变形拉花原因
1.1 有理函数模型(rational function model,RFM)
卫星遥感影像正射校正常用模型有多项式模型、共线方程模型和有理函数模型。
有理函数模型(RFM)独立于具体传感器,满足公开化传感器参数、通用化几何成像模型、智能化影像处理方式的需求,被广泛用于高精度影像定位与影像的快速正射校正技术。在RFM中,不同阶数的参数补偿不同的畸变,本次试验主要采用一阶多项式进行纠正。
1.2 基于RFM的区域网平差
基于RFM的区域网平差根据初始有理多项式系数(rational polynomial coefficients,RPC),利用少量外业控制点的地面坐标及其在影像上的量测坐标,计算每一景影像的仿射变换参数以及所有连接点的地面坐标,再利用反解法校正影像。
1.3 反解法数字微分纠正
数字微分纠正的基本任务是实现原始影像和纠正后影像之间的几何变换。现有软件常用反解法计算对应像元素的坐标,利用数字高程模型对原始影像逐个像元进行投影差改正,然后采用双线性法进行灰度内插,最后将像点的灰度值赋值给纠正后的像元。
1.4 变形拉花产生的原因
DOM变形拉花主要由以下两种原因造成:
(1)DEM数据错误,与真实地形存在较大偏差;
(2)相邻像点物方坐标邻近,而高程值相差过大。
原始影像通过中心投影方式获取,影像上每个像素都通过同一个摄影中心。图1中,山峰A
到山谷B
地势陡峭,存在较大高差。由A
、B
两点的物方坐标计算像方坐标,实际地形从B
到A
排列,经中心投影,影像上从A
′到B
′排列,排列顺序错乱,反映在DOM上即为变形拉花。受地形起伏的影响,C
、D
两点实地距离与原始影像上C
′、D
′两点距离之比不是常数,即地面上很长一段距离在原始影像上的成像非常狭窄,导致成像信息不足。灰度重采样时,多个地面点就会使用同一个灰度值,出现“多对一”的情况,从而产生拉花现象。反映在DEM上,表现为坡度越陡,高差越大,变形拉花越严重。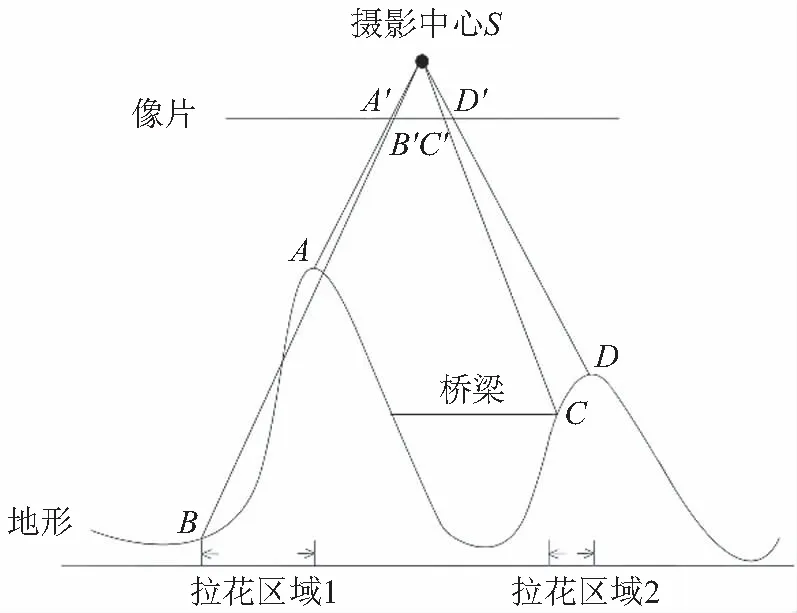
图1 变形拉花成因
2 基于空间域的栅格数据处理算法
2.1 均值滤波
均值滤波是一项空间域平滑技术,属于典型的线性滤波算法。给定目标像素一个模板,该模板包括了其周围的临近像素,以模板大小3×3像素为例,目标像素为中心的周围8个像素,去掉目标像素本身,构成一个滤波模板,再用模板中的全体像素的平均值来代替原来像素值。均值滤波输出像素是模板覆盖的所有像素的均值,如图2所示。
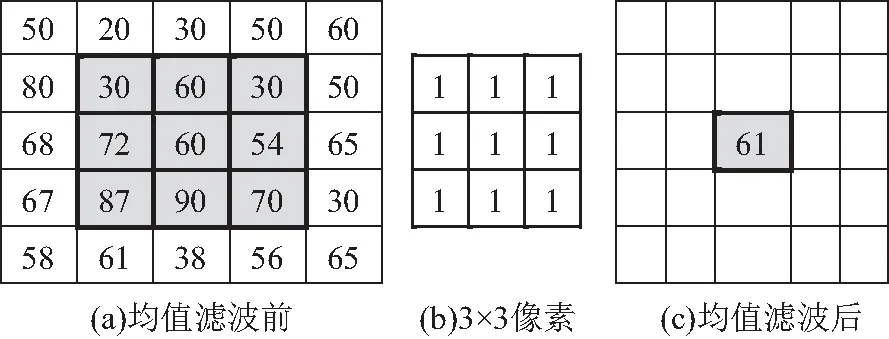
图2 3×3像素均值滤波
2.2 中值滤波
中值滤波是在空间域进行平滑处理的技术,属于一种非线性平滑滤波器。将模板区域内的像素从小到大(或从大到小)排序,求出中值,如图3所示。

图3 3×3像素中值滤波
3 基于格网抽稀和平滑滤波协同处理DEM纠正DOM的方法
3.1 研究区概况及数据源
本试验区跨越海南省东南部5个市县,面积约1 590 km。涉及53幅1∶10 000图幅,其中3幅平地、3幅丘陵、34幅山地、13幅高山地。2018年至2021年共4年的影像生产经验表明,该区域DOM极易出现变形拉花,具有较强的代表性。
本次试验数据源为7景WorldView 2,经过辐射校正的LV2A级别卫星影像,侧摆角为2.2°。
3.2 基于格网抽稀和平滑滤波协同处理DEM的技术流程
利用5 m DEM、10 m DEM(5 m DEM抽稀)和15 m DEM(5 m DEM抽稀),对原始全色和多光谱影像及基准DOM进行RFM正射纠正,分别得到n
(n
=1~3)个结果DOM、DOM、DOM,比较各地理要素的变形拉花数量,选出变形拉花数量最少的DOM对应的15 m DEM(最佳参数1)。由于15 m DEM纠正DOM仍存在较多变形拉花,为兼顾DOM的数学精度,不再进一步抽稀,而对DEM进行平滑滤波。平滑滤波主要分为均值滤波和中值滤波,采用不同模板尺寸(9×9像素~13×13像素)对15 m DEM进行平滑滤波。
同一格网(15 m)不同模板平滑滤波的DEM,比较所纠正DOM(DOM~DOM)的变形拉花数量。统计n
(n
=1~6)种DOM的变形拉花,得到变形拉花数量最少的DOM,其相应DEM为经模板尺寸11×11像素均值滤波的15 m DEM,即最佳参数2。具体流程如图4所示。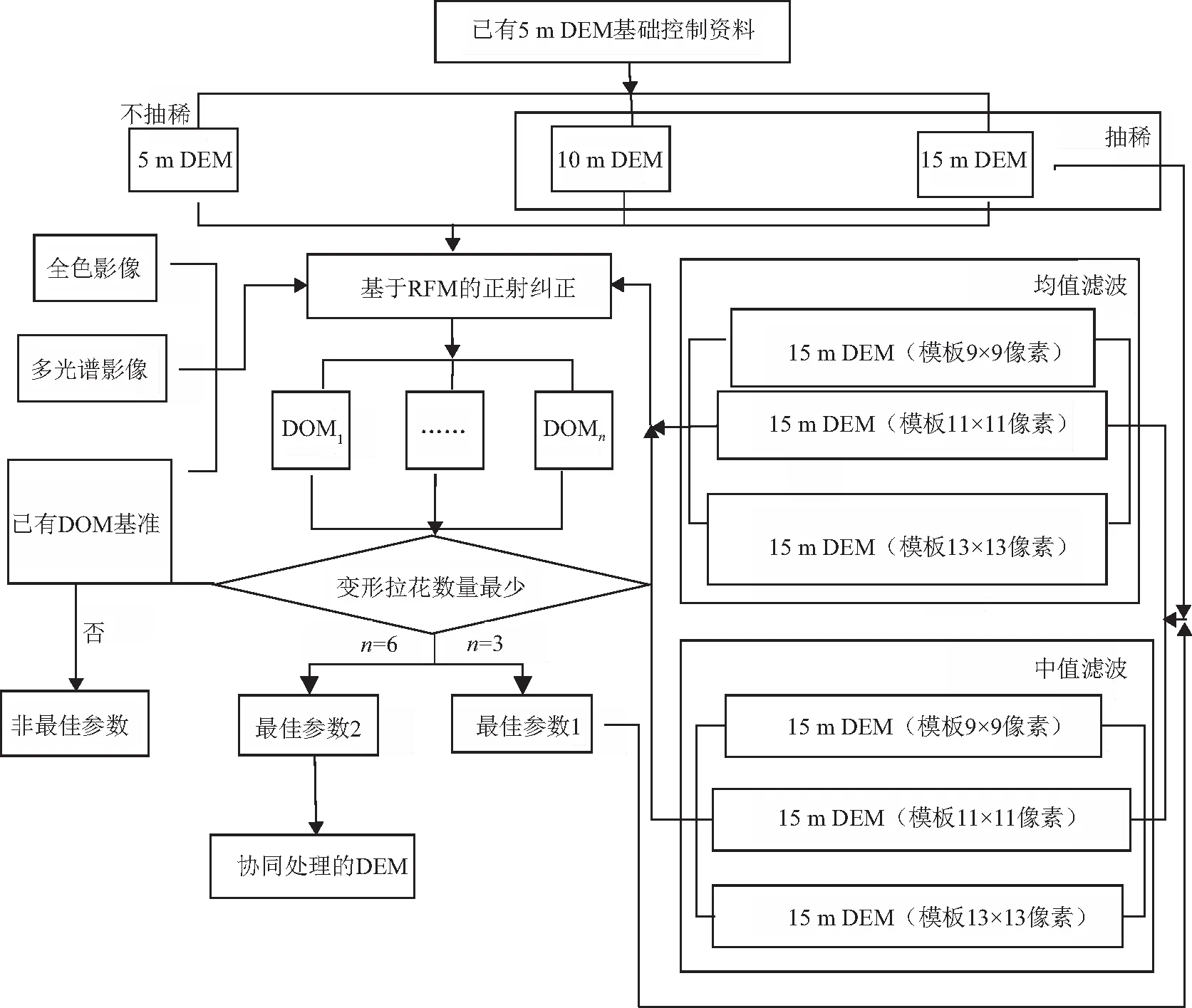
图4 格网抽稀和平滑滤波协同处理DEM的技术流程
4 试验结果与方法评价
4.1 试验结果
本试验使用不同方法处理的DEM纠正DOM,通过比较植被、道路、房屋、桥梁、堤坝、输水渡槽、地貌、沟渠共8类地理要素,确定变形拉花最少DOM对应的最佳DEM。
本次选取两种典型要素的试验结果进行展示。图5、图6表明,5 m抽稀为10 m、15 m DEM时其细节表现力逐渐减弱,但DOM的变形拉花得到改善。桥梁、房屋由5 m DEM时的严重拉花变形,到10 m时的较严重拉花变形和15 m时明显拉花变形,但仍未完全消除。随着DEM格网间距增大,DOM精度逐步下降。为了保证DOM精度,不再进一步抽稀DEM,而利用15 m DEM进行滤波处理。一般情况下,滤波模板越大,越能改善变形拉花。15 m DEM(11×11像素均值滤波)纠正DOM,桥梁、房屋的变形拉花完全消除,15 m DEM(13×13像素均值滤波)纠正DOM,桥梁和房屋仍存在较为明显拉花变形。
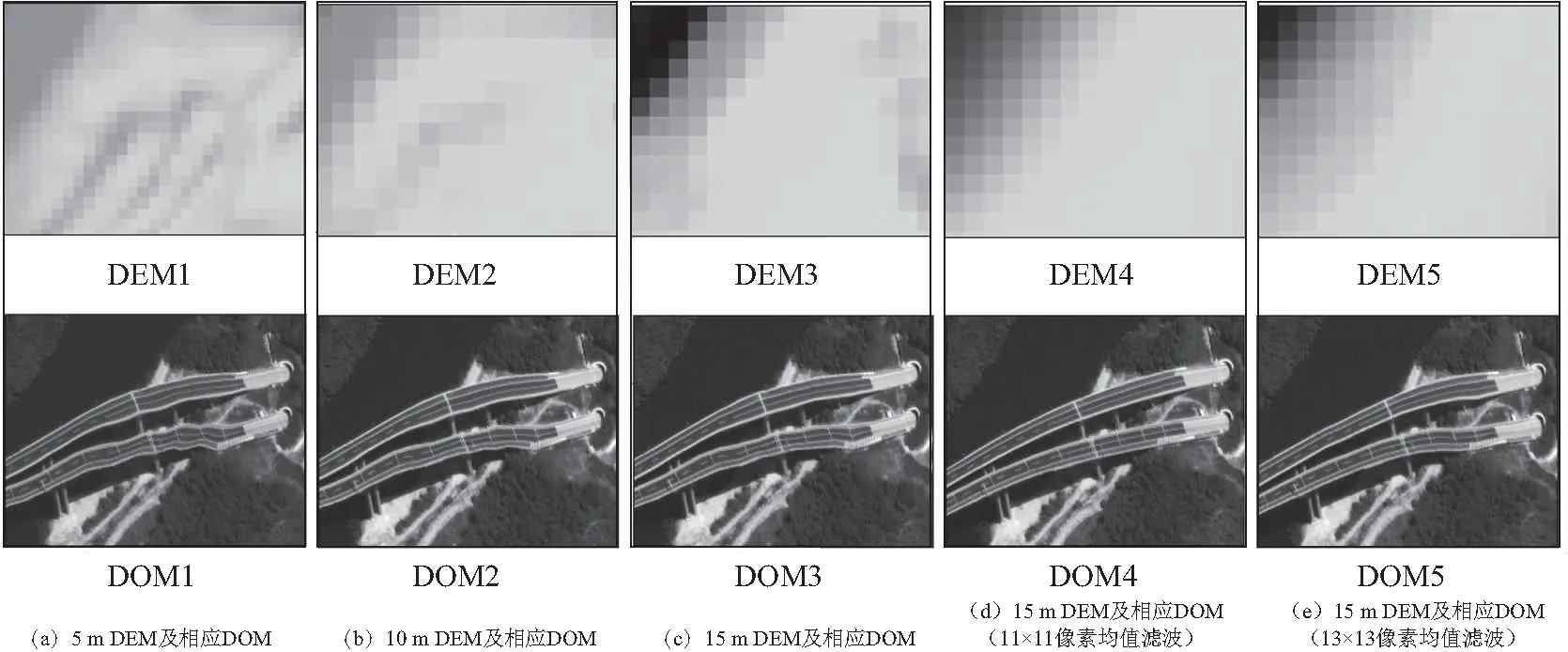
图5 桥梁DEM及相应DOM变形拉花效果展示图
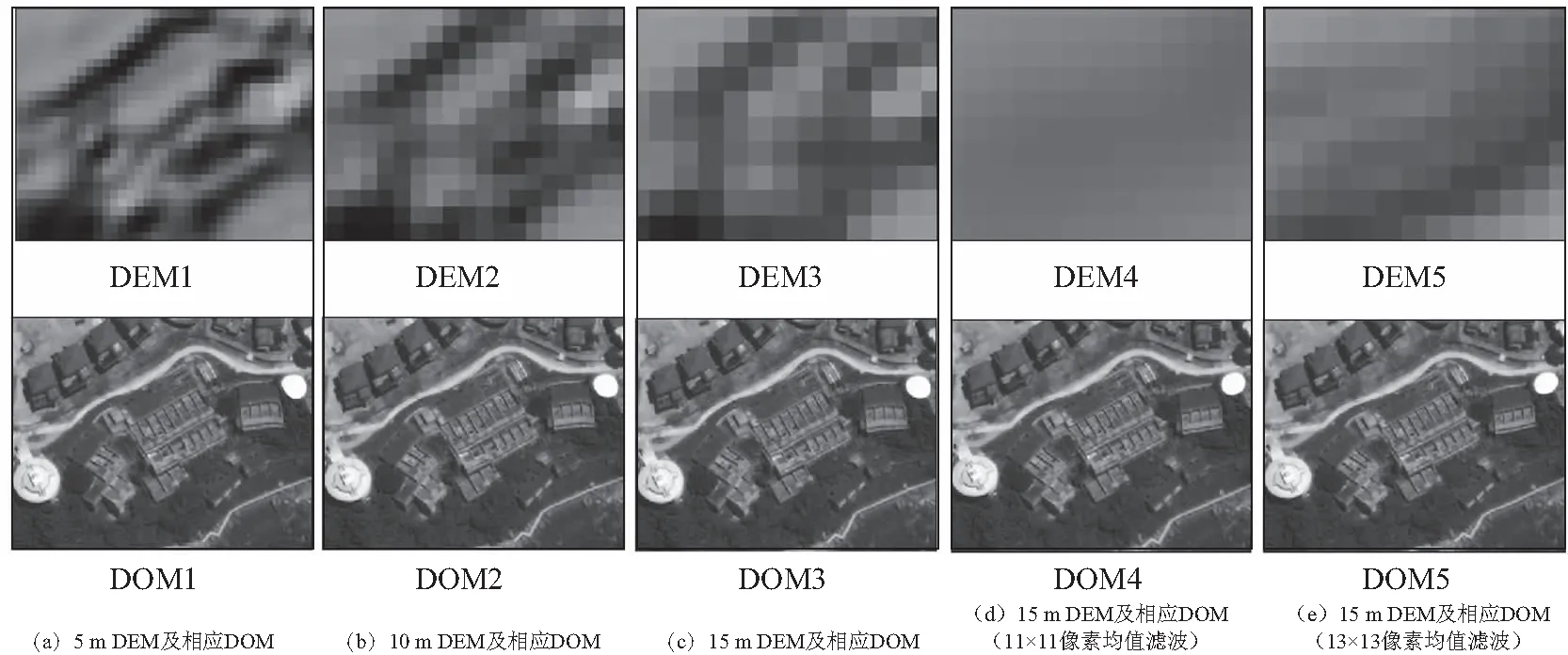
图6 房屋DEM及相应DOM变形拉花效果展示图
4.2 方法评价
4.2.1
变形拉花消除率评价将5 m DEM分别抽稀为10 m和15 m,由图7可知,道路的变形拉花由原来5 m DEM的57处降至10 m DEM的53处,降至15 m DEM的50处,相对5 m DEM,分别消除了7.02%和12.28%的变形拉花,消除率(变形拉花减少的数量除以5 m DEM相应DOM的变形拉花数量)最高;由高到低排列,植被变形拉花的消除率次之,分别为3.80%和6.33%,房屋变形拉花的消除率居第三位,分别为3.70%和3.70%;桥梁变形拉花的消除率居第四位,分别为1.0%和3.0%;消除率最低为沟渠、输水渡槽、地貌、堤坝这4种地理要素,均为0%。数据表明,15 m DEM对消除DOM变形拉花优于10 m DEM和5 m DEM。因此,在15 m DEM的基础上,进一步做均值滤波和中值滤波。故在15 m DEM的基础上进一步做均值滤波和中值滤波。

图7 不同格网DEM相应DOM的变形拉花数量
图8中,用A~F分别表示不同类型DEM。A为9×9像素均值滤波后的15 m DEM,B为11×11像素均值滤波后的15 m DEM,C为13×13像素均值滤波后的15 m DEM,D为9×9像素中值滤波后的15 m DEM,E为11×11像素中值滤波后的15 m DEM,F为13×13像素均值滤波后的15 m DEM。相对于5 m DEM,8类要素中有5类要素,B类DEM所消除变形拉花率最高,最高达100%,最低达50%,其余类型DEM的消除率部分与前者持平,大部分均低于前者。统计8类要素总的变形拉花,B类DEM所消除的变形拉花率也是最高,达78.7%。
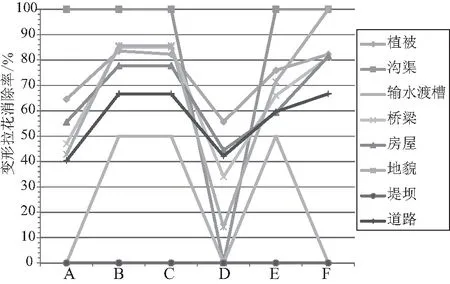
图8 15 m格网不同滤波模板DEM的变形拉花消除率
4.2.2
不同滤波模板精度评价统计结果表明,B类DEM所消除DOM变形拉花最多。受DEM抽稀和均值滤波共同影响,DOM精度一定程上有所损失。为此,特利用26个均匀分布的野外像控点进行精度评估,结果如表1所示。

表1 B类DEM纠正DOM的精度
表1中,B类DEM所纠DOM平面位置最大残差2.63 m,最小残差为0.06 m,中误差为1.28 m,均符合DOM生产规范要求。
4.2.3
效率评价经验表明,方法一比方法二、方法三的方法效率高。故针对DOM的变形拉花,以方法一为例。基本处理流程包含三步:①DEM设为平均高程,纠正DOM;②影像预处理(正射校正和匀色);③Photoshop中贴补变形拉花。
基于格网抽稀和均值滤波的方法处理流程也包括三步:①DEM抽稀和均值滤波;②影像预处理;③Photoshop中贴补变形拉花。
根据2018和2019年全国第三次国土调查正射影像生产和2018—2021年海南省航空航天遥感影像获取与统筹服务卫星数字正射影像生产的经验统计,每景影像相应DEM处理为平均高程用时约0.02 h,而处理格网抽稀和均值滤波DEM用时约0.05 h。每景影像预处理平均用时约0.02 h。多年生产经验表明,熟练技术人员在Photoshop中处理变形拉花,效率为人均8 h处理85处。
针对本试验区7景影像共计277处变形拉花进行后处理,基于格网抽稀和均值滤波方法与方法一的效率比对如图9。其中,WV2P006这景的变形拉花最多,方法一处理最多需要7.85 h,而新方法需要1.73 h。新方法处理每景变形拉花平均需要0.86 h,方法一平均需要3.76 h,前者是后者处理效率的4.37倍,即新方法比常规方法效率提高约3.37倍。
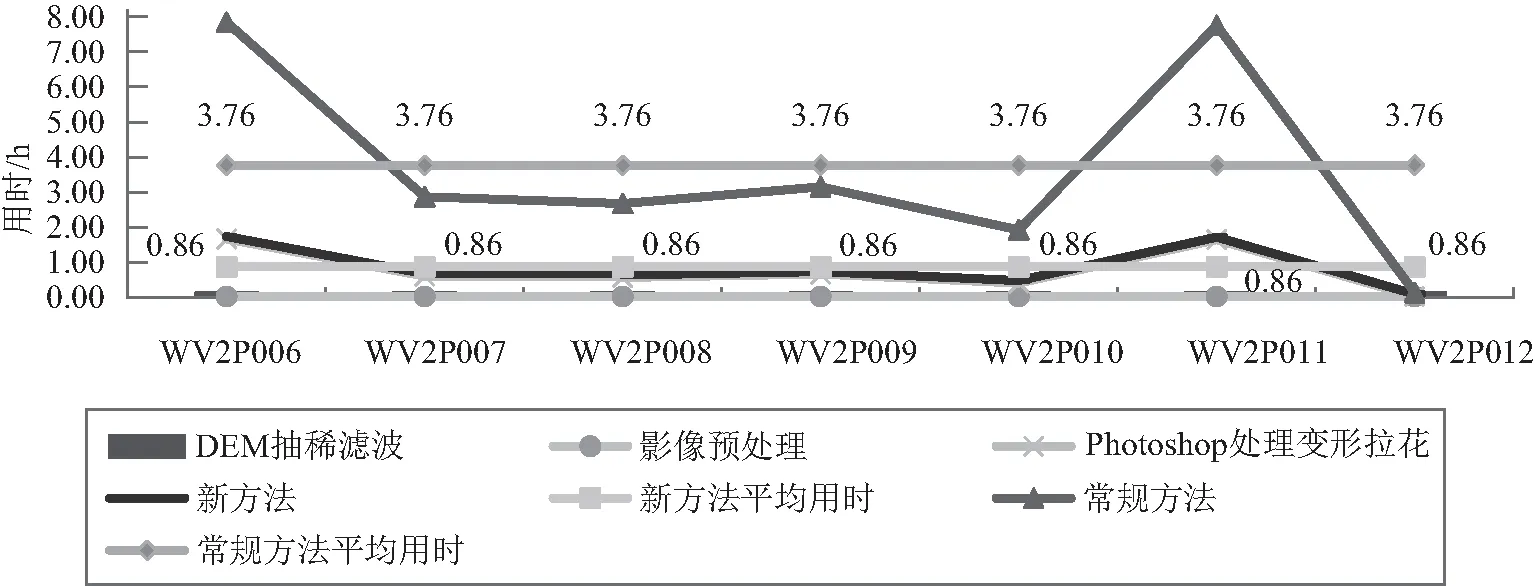
图9 新方法与常规方法的效率比对
5 结论
本研究以5 m DEM为基础,对其进行格网抽稀和平滑滤波处理,统计所纠正DOM的变形拉花,比较不同DEM的变形拉花消除率,评价DOM精度和生产效率,得出以下结论:
(1)基于RFM模型的卫星影像正射校正过程,5 m DEM抽稀为10 m和15 m,用于纠正卫星影像,15 m DEM消除的变形拉花多于10 m DEM和5 m DEM。在15 m DEM基础上,采用不同模板进行平滑滤波,11×11像素均值滤波DEM所纠正DOM的变形拉花消除率最高;
(2)根据规范《CH/T 9009.3—2010基础地理信息数字成果1∶5 000、1∶10 000、1∶25 000、1∶50 000、1∶100 000数字正射影像图》要求,1∶5 000比例尺DOM产品平地、丘陵地的平面位置中误差为2.5 m,山地高山地的平面位置中误差为3.75 m。11×11像素均值滤波的15 m DEM所纠正DOM的平面位置精度满足规范要求;
(3)根据海南省历年的生产经验可知,11×11像素均值滤波的15 m DEM所消除DOM的变形拉花,与方法一相比,效率提高约3.37倍;
(4)从DOM生产的前期正射校正环节处理变形拉花,而不是匀色影像的基础上处理,有效释放人力,减少后期人工处理的工作量,并在一定程度上减少对第三方软件的依赖,快速解决了变形拉花问题。
基于格网抽稀和平滑滤波协同处理DEM,纠正DOM显著消除变形拉花的方法,已广泛应用于海南省航空航天遥感影像获取与统筹服务卫星数字正射影像生产项目,涉及影像景数1 067景,并在实际生产中发挥着重要作用。
6 结束语
本方法基于同一传感器的同轨卫星进行试验研究,侧摆角较小,经过DEM抽稀和平滑滤波协同处理,消除DOM变形拉花效果显著。但不能解决100%的DOM变形拉花,未消除的少部分变形拉花需用方法一或方法三进一步处理,仍存在一定的工作量。本次试验未考虑较大侧摆角,如侧摆角达到20°或者更大数值(35°),本方法对DOM变形拉花的影响。一般情况下,卫星影像侧摆角越大DOM变形拉花越大。下一步将针对侧摆角20°及以上的卫星影像进行测试,根据实际情况调整优化本方法的技术参数,不断提升本方法的普适性。