双臂型巡检清障机器人运动学分析与轨迹规划
2022-10-10马利娜王成军
马利娜,王成军
双臂型巡检清障机器人运动学分析与轨迹规划
马利娜1,2,王成军1,2
(1. 深部煤矿采动响应与灾害防控国家重点实验室,安徽 淮南 232001;2. 安徽理工大学 人工智能学院,安徽 淮南 232001)
针对机器人在巡检领域的清障问题,以双臂型巡检清障机器人为研究对象。基于MDH法建立巡检清障机器人的运动学方程,通过数学推导和仿真实验进行相关验证;根据蒙特卡罗法分别画出左右臂的工作空间点云图,求解出双臂协作工作空间的范围;在CoppeliaSim软件中建立巡检清障机器人模型,并通过Lua脚本语言控制机器人进行清障轨迹规划。仿真结果表明该机器人满足运动要求。
巡检清障机器人;双臂;运动学;工作空间;轨迹规划
随着科学技术的迅速发展,巡检机器人被广泛应用于运输、检修、巡检等环境中,在煤矿产业由劳动化向机械化生产转型中发挥着不可替代的作用。双臂机器人模仿人类双臂协作的生物机制,可在一些特殊复杂多变的环境中完成作业任务[1–2],双臂型巡检清障机器人的研究已然成为研究热点。曹彩霞等[3]对双SCARA机器人采用DH法进行运动学分析;荆学东等[4]对双臂服务机器人利用蒙特卡罗法进行工作空间分析;万正海等[5]对双臂机器人关节空间轨迹规划进行分析;葛连正等[6]基于V-REP对六自由度机器人进行轨迹规划分析。课题组通过MDH法建立双臂运动学模型;使用蒙特卡罗法对双臂工作空间进行分析;在CoppeliaSim软件中通过Lua脚本语言控制机器人运动,为后续巡检清障机器人运动控制提供理论依据。
1 运动学模型的建立
通过SolidWorks软件装配后的双臂型巡检清障机器人,如图1所示。
机械臂运动学模型是根据机械臂连杆间几何关系,目前建立连杆坐标系的方法有旋量法[7]、T矩阵法、DH法[8]等,采用MDH法建立巡检清障机器人双臂的各连杆坐标系,如图2所示。以巡检清障机器人右臂为例,连杆参数如表1所示。
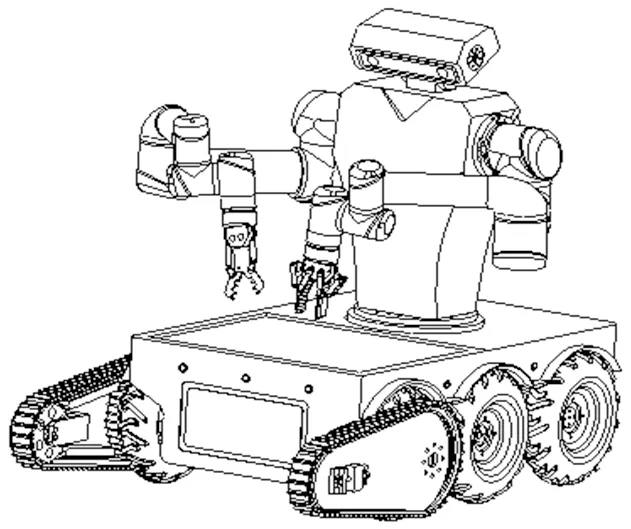
图1 巡检清障机器人三维模型图
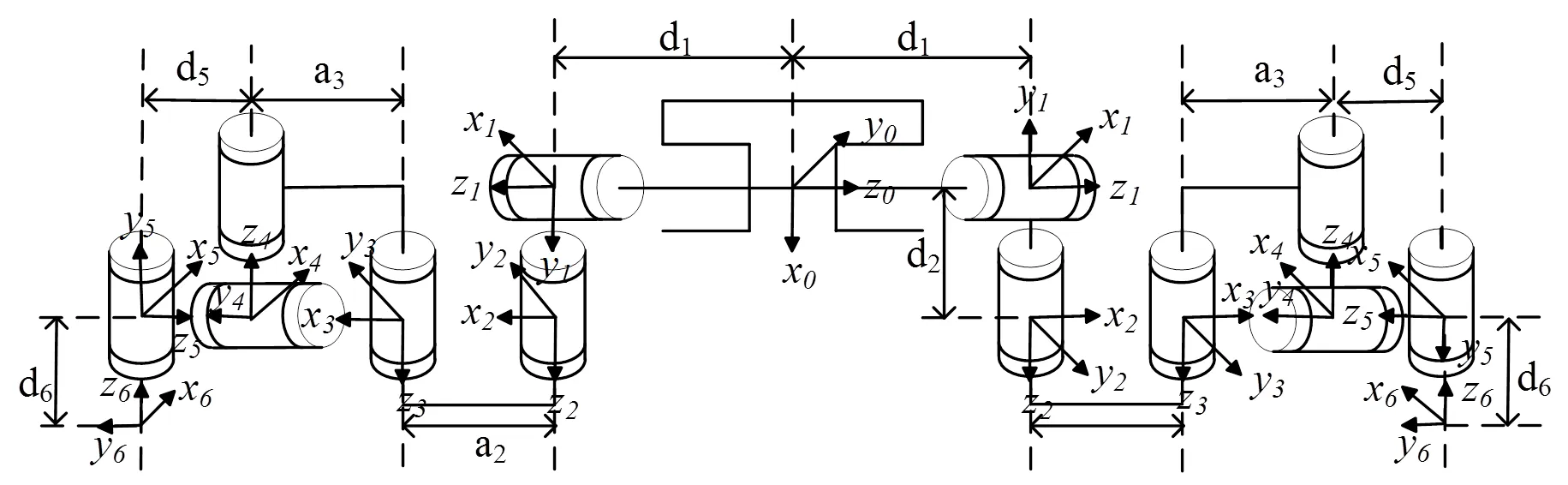
图2 巡检清障机器人双臂的MDH坐标系
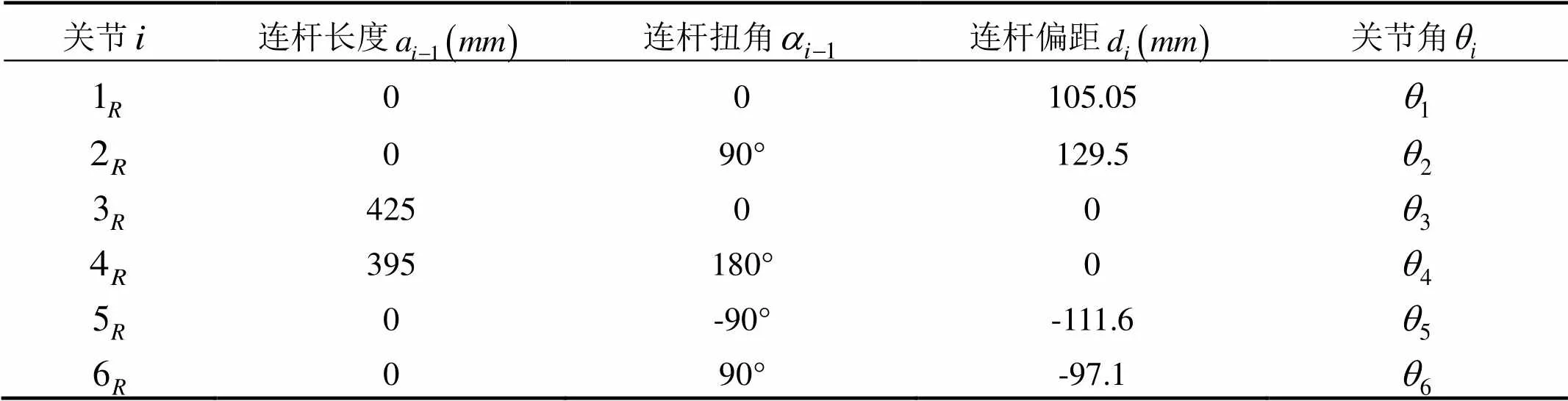
表1 巡检清障机器人右臂的MDH参数表
2 巡检清障机器人运动学求解
2.1 正运动学求解
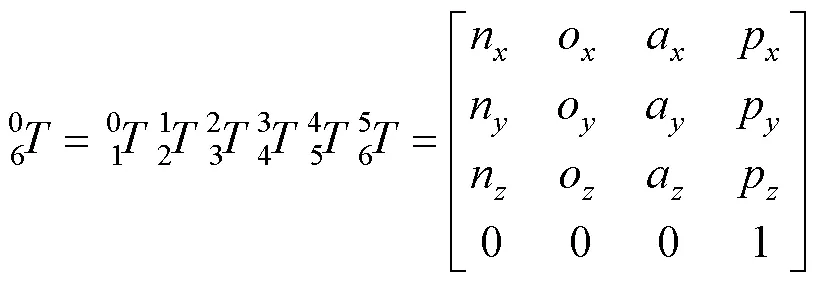
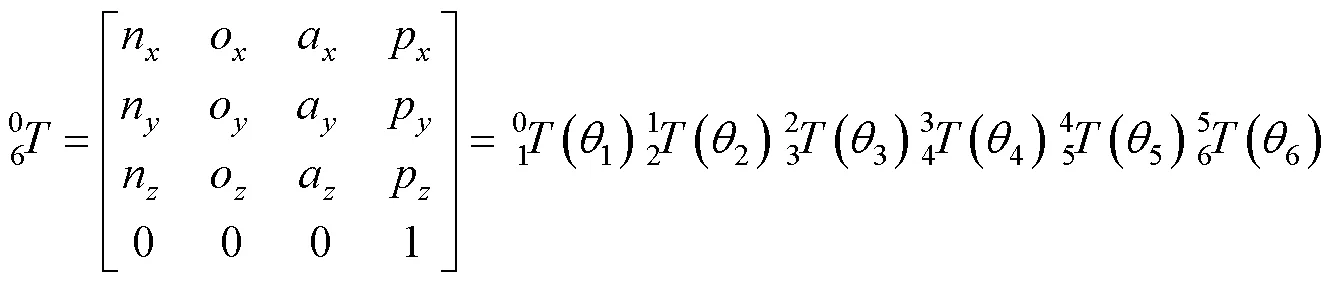
根据MDH法建立运动学方程,按照右乘法则,将各连杆对应的齐次变换矩阵依次相乘,给定关节角变量,求解操作臂末端坐标系相对基坐标系的位姿[9]。机械臂相邻连杆之间的齐次变换矩阵[10]的一般表达式为:

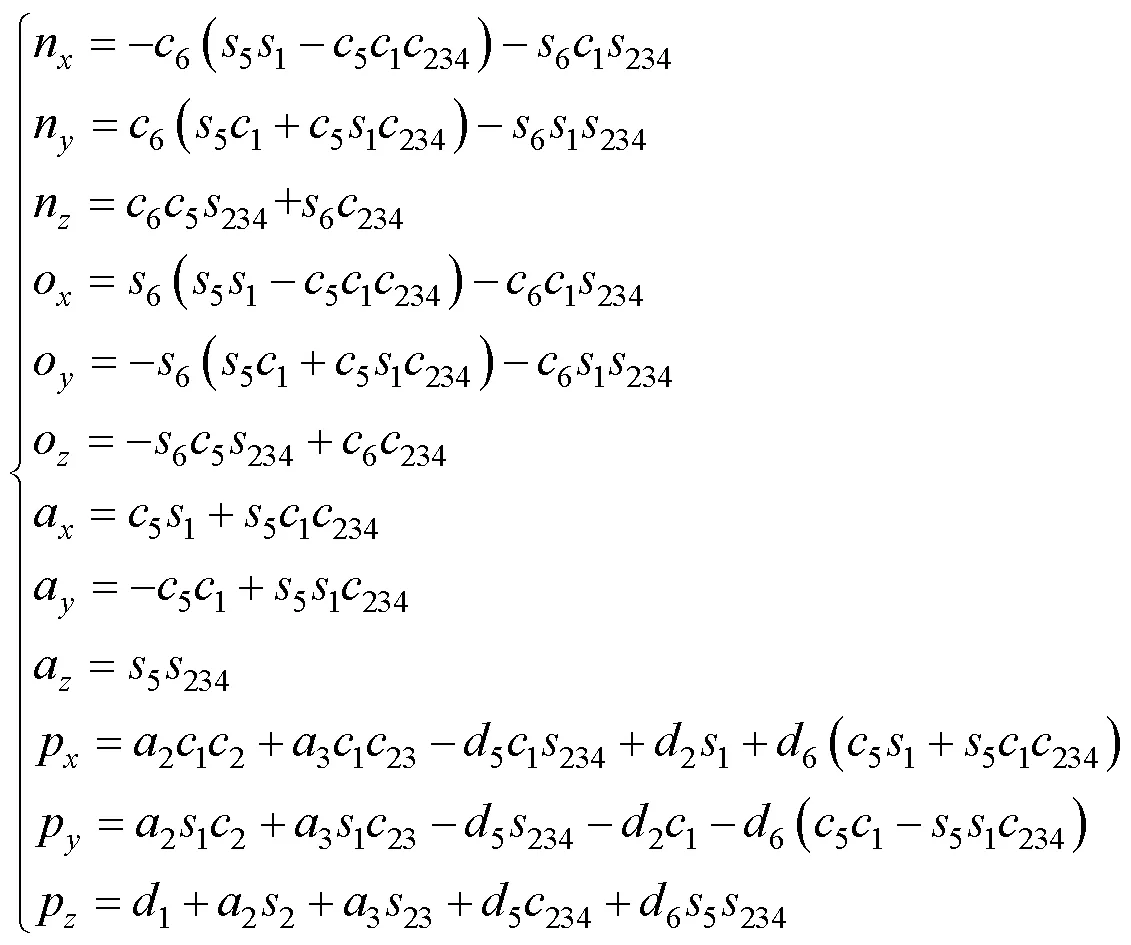
巡检清障机器人右臂的运动学方程为:
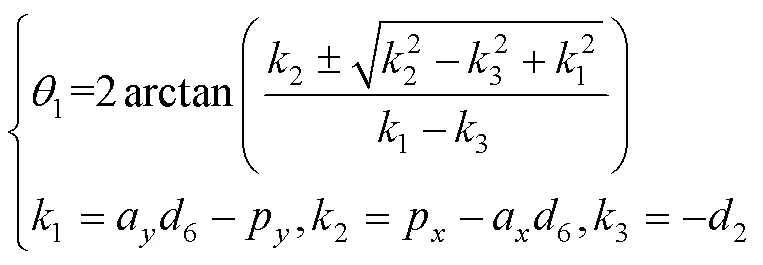
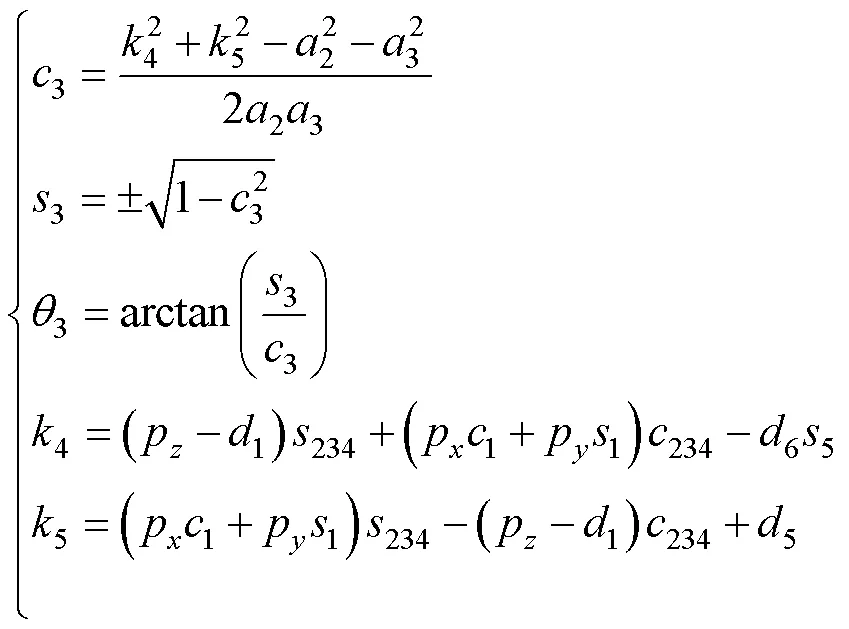
2.2 逆运动学求解



2.3 逆运动学验证

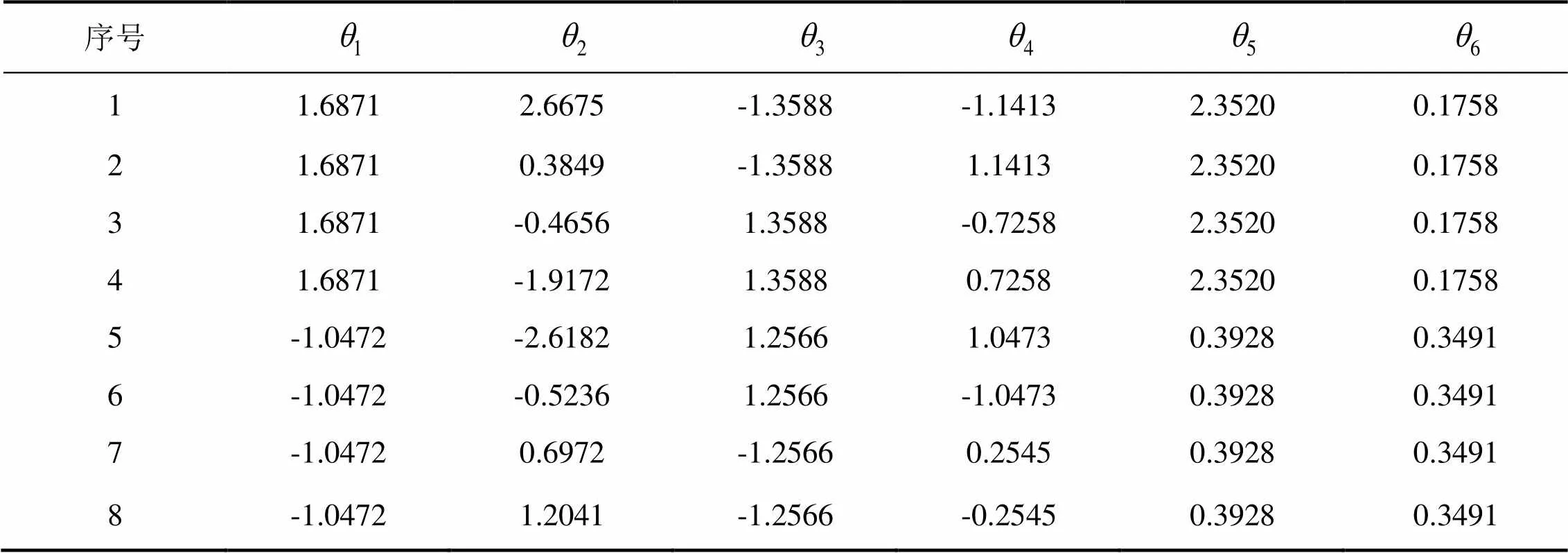
表2 右臂末端位姿所得逆解

3 工作空间分析
巡检清障机器人的工作空间由左臂和右臂的可达工作空间共同决定。蒙特卡罗法[12]错误!未找到引用源。是通过随机数求取机器人工作空间,具备简单和计算速度快的优点,适用于求解各种关节机械臂的工作空间。
采用蒙特卡罗法对巡检清障机器人的工作空间进行仿真分析,根据左右臂的关节角,及各关节有相应的角度范围约束,结合正运动学方程和在其约束内随机取值,得到末端执行器位置空间坐标值的集合即机器人的工作空间,绘制巡检清障机器人工作空间点云图如图3所示,协作工作空间为巡检清障机器人左右臂工作空间叠加部分。
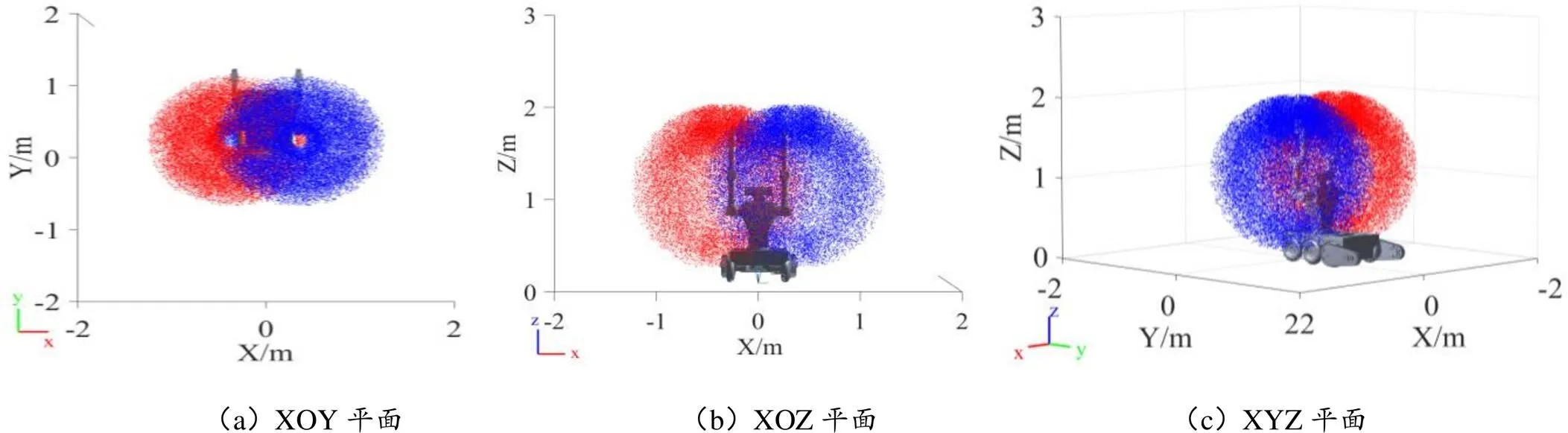
图3 巡检清障机器人工作空间
4 清障轨迹规划
以巡检清障机器人双臂协作完成清障作业运动到指定状态为例,在CoppeliaSim软件中建立巡检清障机器人模型,并通过 Lua脚本语言控制机器人,双臂初始状态及目标状态如表3所示。

表3 巡检清障机器人双臂状态
规划的巡检清障机器人双臂路径通过机械臂正运动学计算出的末端轨迹如图4所示,对机械臂清障作业过程进行无干涉轨迹规划后,以 50 ms为间隔生成总时长3 s,其中关节角度随时间变化如图 5所示,由图5可以看出,规划的路径平滑无突变,运动平稳,同时说明巡检清障机器人双臂各连杆设计参数的合理性。
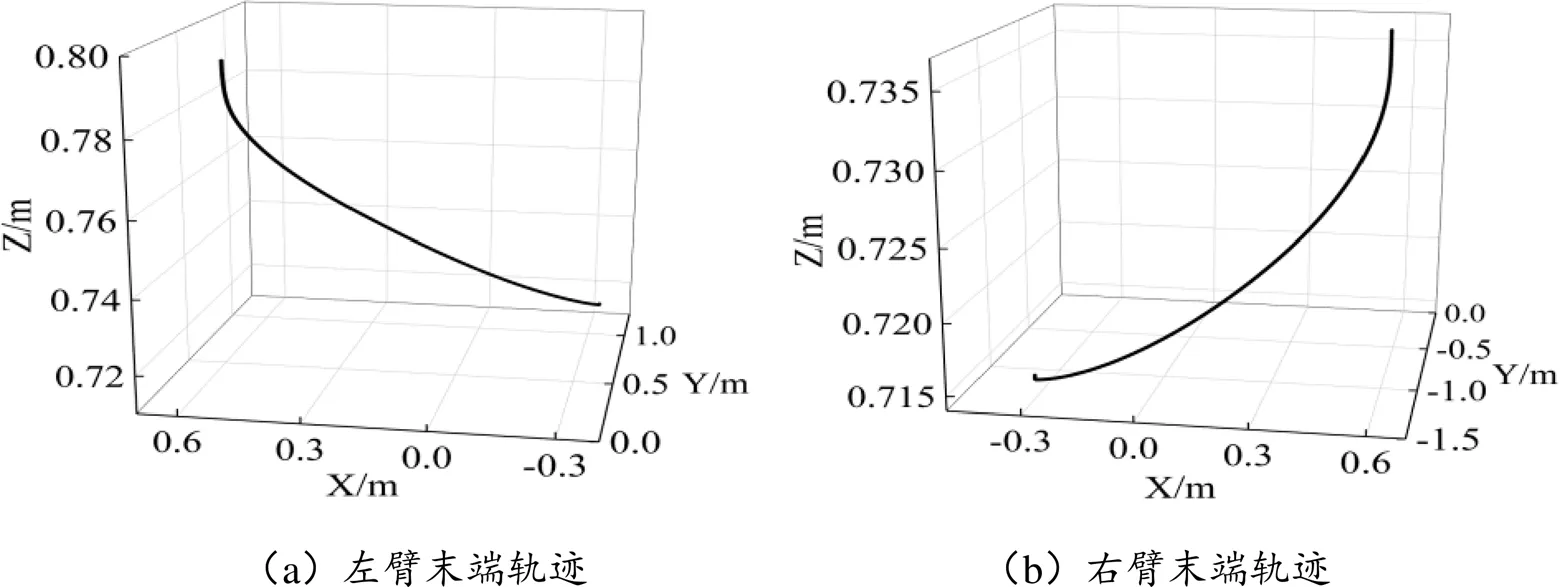
图4 双臂末端轨迹
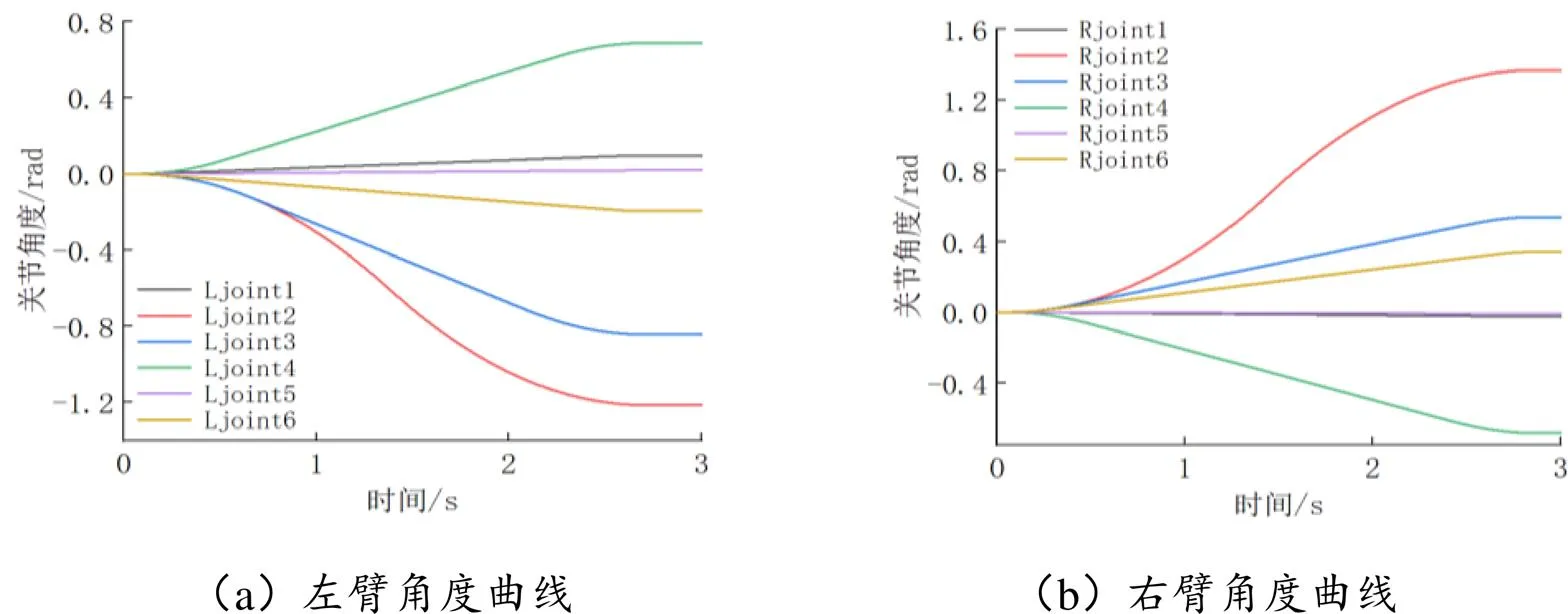
图5 关节角速度随时间变化图
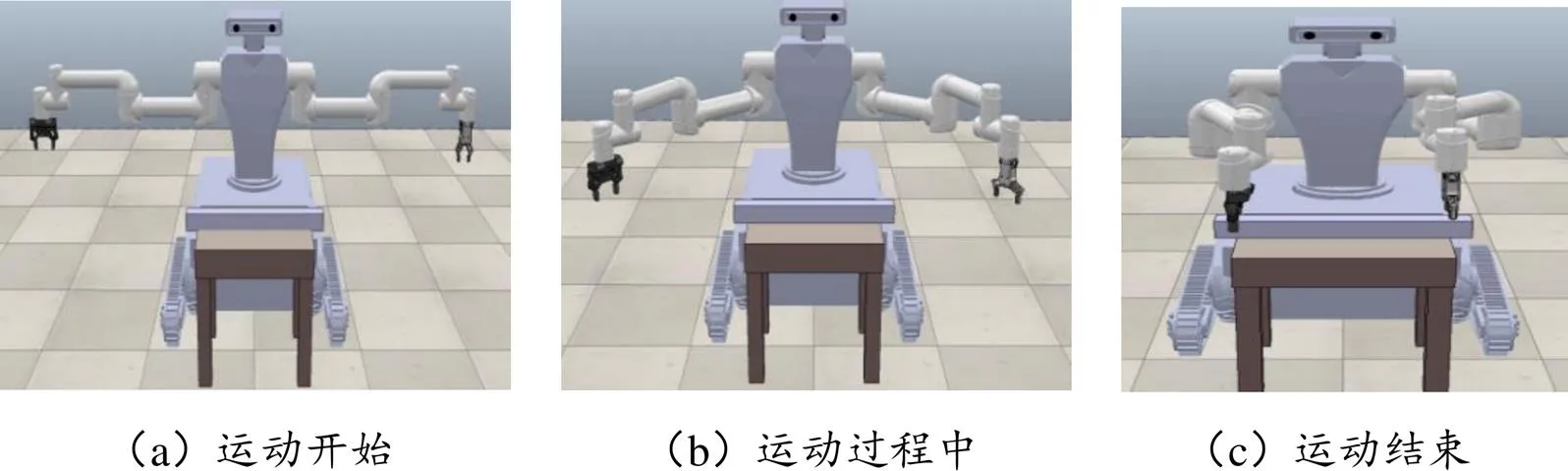
图6 基于任务的双臂轨迹规划
5 结论
基于MDH法建立了巡检清障机器人双臂正、逆运动学方程及运动学模型,通过数学推导和仿真实验验证了模型的正确性。采用蒙特卡罗法求解巡检清障机器人的协作工作空间,验证了其工作空间满足机器人清障的空间需求。在CoppeliaSim软件中建立巡检清障机器人模型,再通过 Lua脚本语言控制机器人进行清障轨迹规划,仿真结果表明,所设计的巡检清障机器人能够有效完成清障等工作要求。
[1] LIU LUYU, LIU QIANYUAN, SONG YONG, et a1. A collaborative control method of dual-arm robots based on deep reinforcement learning[J]. Applied sciences, 2021, 11(4): 1816.
[2] 张续冲, 张瑞秋, 陈亮, 等. 仿人机械双臂的运动学建模及实验[J]. 机械设计与研究, 2020, 36(6): 24–28+34.
[3] 曹彩霞, 赵明扬, 朱思俊, 等. 双臂机器人协调搬运运动的运动学分析[J]. 组合机床与自动化加工技术, 2017, 8(11): 44–47.
[4] 荆学东, 薛毓铨, 陈亚楠. 6R双臂服务机器人协作空间分析及参数优化[J]. 机械科学与技术, 2021, 40(6): 840–845.
[5] 万正海, 李锻能, 王冲, 等. 移动机器人机械臂运动分析及轨迹规划[J]. 机床与液压, 2019, 47(23): 56–60, 68.
[6] 葛连正, 赵立军. 基V-REP的机器人仿真实验系统及教学[J]. 实验技术与管理, 2021, 38(3): 132–135.
[7] 刘冠隆, 贺晓莹, 高兴宇, 等. 七自由度双臂机器人旋量理论正向运动学与工作空间分析[J]. 机械科学与技术, 2019, 38(5): 704–712.
[8] QIAO GUIFANG, WAN QI, LV ZHONGYAN, et al. Kinematic parameters calibration method of serial robot based on ZRM-MDH model transformation[J]. Transactions of the Chinese society for agricultural machinery, 2021, 52(3): 382–389.
[9] SHI XIAOHUA, GUO YU, CHEN XUECHAN, et al. Kinematics and singularity analysis of a 7-DOF redundant manipulator[J]. Sensors, 2021, 21(21): 7275.
[10] CAI SIQI, HUANG GUOWEI, HUANG LEDENG, et al. Kinematics, analysis, design, and simulation of a dual-arm robot for upper limb physiotherapy[J]. IOP conference series: materials science and engineering, 2018, 397(1): 12049.
[11]陈波芝, 陆亮, 雷新宇, 等. 基于改进快速扩展随机树算法的双机械臂协同避障规划方法[J]. 中国机械工程, 2018, 29(10): 1220–1226.
[12] 谢生良, 刘祚时. 双臂机器人工作空间的分析与仿真[J]. 机械传动, 2018, 42(6): 139–143.
Kinematics Analysis and Trajectory Planning of Dual-armed Obstacle-clearing Inspection Robot
MA Li-na1,2,WANG Cheng-jun1,2
(1. State Key Laboratory of Mining Response and Disaster Prevention and Control in Deep Coal Mines, Huainan Anhui 232001, China; 2. School of Artificial Intelligence, Anhui University of Science and Technology, Huainan Anhui 232001, China)
For the problem of obstacle clearing in inspection robots, a dual-armed obstacle-clearing inspection robot is taken as the research object. The kinematics equation of the obstacle-clearing inspection robot is established based on modified Denavit-Hartenberg method, and is verified by mathematical derivation and simulation experiments. The point cloud maps of the working space of the left and right arms are drawn respectively, and the range of the working space of the two arms is solved according to the Monte Carlo method. The model of obstacle-clearing inspection robot is established in CoppeliaSim, and the robot is controlled by Lua script language for obstacle clearing trajectory planning.
obstacle-clearing inspection robot; dual arm; kinematics; range of working space; trajectory planning
2022-04-14
深部煤矿采动响应与灾害防控国家重点实验室开放基金项目(SKLMRDPC19ZZ01)
马利娜(1997—),女,陕西榆林人,硕士研究生,研究方向:机器智能与人机融合。
A
2095-9249(2022)03-0078-05
〔责任编校:陈楠楠〕
