伺服电缸加压系统的压力控制方法
2022-10-08张文琪
韦 杰,张文琪,温 岩,田 芳
(中国电子科技集团公司第二研究所,山西 太原030024)
伺服电缸是伺服电机与机械传动装置集成于一体的模块化产品设计,具有结构紧凑、响应速度快、抗过载能力强、占用空间小等特点,在工程机械、压力实验设备、航空航天等领域中被广泛应用。随着工业应用需求的不断提高,伺服电缸正在向大推力、智能化、数字化的方向发展。液压伺服系统在100 kN以上的加压场景下被广泛使用,但是液压伺服系统的组成复杂、体积大,在空间有限的净化间内很难安置。相比之下,电动加压系统结构简单,操作方便,控制精确,适用于空间有限、洁净度和噪声要求高的场所[1]。另外,电动伺服加压系统中执行器同步性好,电缸控制精度高,更容易实现同步协调。随着伺服电缸控制技术的不断完善,伺服电缸加压系统在高精度、大压力场景中的推广应用成为一种必然趋势[2]。
针对大尺寸芯片倒装工艺过程的加压需求,伺服电缸提供了一种大压力、高精度的加压方法,其结构示意图如图1所示。
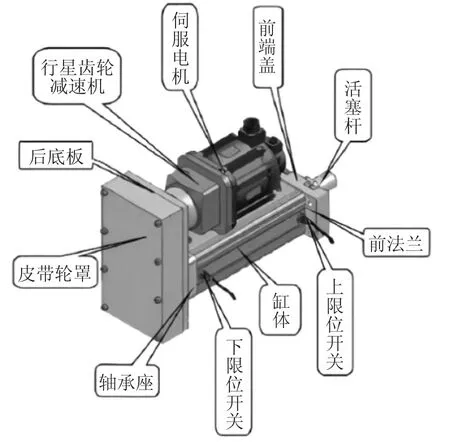
图1 伺服电缸结构示意图
1 工作原理
在伺服加压系统中,电缸装有旋转编码器和直线编码器,利用双编码器反馈实现了电缸的高精度位移,其步进精度可达到0.5 μm;然后,在推力的输出部分设置了碟簧,在同样的输出力矩下,增加了电缸的行程,提高了系统整体的加压分辨率。通过PLC对电缸进行控制,利用增量式PID控制方法对电缸的输出力进行调节,达到高精度、宽范围的输出效果。
加压系统的压力控制原理为:上位机进行压力参数编辑、压力曲线监测和设备状态监测;通过OPCUA协议下位机与上位机进行实时通讯,并执行上位机的指令和回传相关数据,根据接收的加压指令,按给定参数命令伺服电机运动,同时获取压力反馈、运动机构位移和I/O等数据,利用压力控制算法实时处理数据,并纠正压力偏差,实现伺服加压系统的压力实时闭环控制,其控制原理如图2所示。
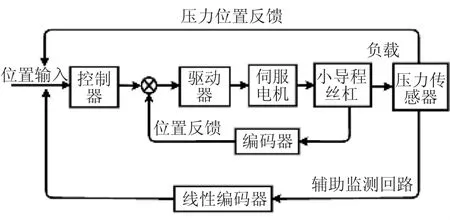
图2 压力闭环控制原理图
2 压力实现方式
压力实现方式为伺服电缸推动加压机构进行产品压合,其控制方式是力矩模式或位置模式。力矩模式的本质是控制电流,在大推力情况下需要有持续的大电流,长时间保持大推力对电机和控制器的要求较高,且有安全风险。而位置模式在位移结束后电流会明显减小,且能持续保持加压状态。要保持2 h以上的大压力,控制方式采用位置模式,将压力转换成位移。
该加压系统使用表面平整的不锈钢片作为试验样片,加压时记录位移与压力的变化量,位移与压力的关系如图3所示。因此,位移与压力变化的传递函数可近似为比例环节[3],其计算式为:
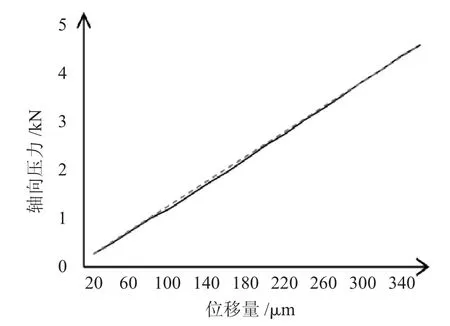
图3 位移-压力曲线图

式(1)中,GL(s)为压力与位移的传递函数,KA为比例系数,s为加压机构位移量。
在上位机操作界面预先设置加压工艺曲线,如图4所示。在加压过程中实时参照压力传感器的反馈进行调节,使过程中读取的压力曲线与预设加压工艺曲线一致。
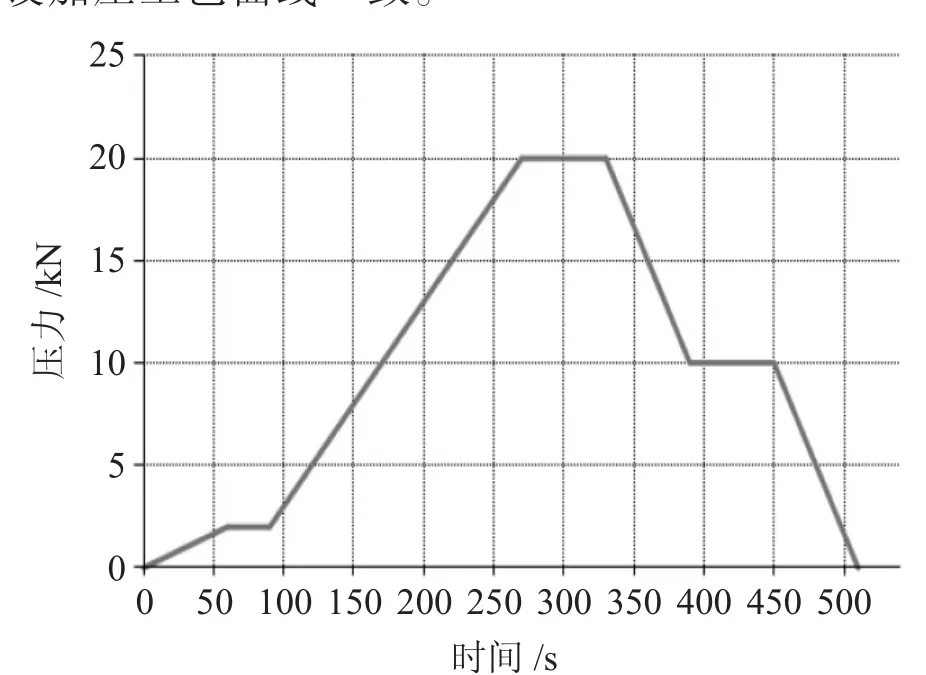
图4 预设加压曲线示意图
采用增量式PID控制进行压力控制,PLC进行运算处理,并按照设置值与反馈值的偏差进行调节[4]。

式(2)中,u(k)为PID计算的输出值,Kp为比例系数,Ki为积分系数,Kd为微分系数,e为偏差。取得计算结果后,PLC将位移指令下达给驱动器,执行机构移动相应的距离实现压力的控制。采用碟簧设计提高了系统加压的分辨率,在最大压力100 kN的情况下,该加压系统的最高分辨率可以达到20 N,即0.2‰。
3 仿真与试验研究
3.1 测试平台搭建
为验证该伺服电缸加压系统的各项参数指标及性能,在大理石平台上搭建了三梁四柱结构的加压系统进行试验,测试平台示意图如图5所示。该加压系统能实现100 kN的最大压力,测试仪器为2个外置压力传感器,量程分别为5 kN和100 kN,保证宽范围、高精度的压力输出效果。

图5 三梁四柱结构测试平台示意图
3.2 仿真与测试
该系统压力控制时的给定值按照预设压力曲线更新,且加压过程长,如果采样时间过短,离散后的给定值相差较小,产生过多无意义的给定值,增大计算负担。因此,采样时间设为200 ms,给定值间隔时间为1 000 ms,理想控制曲线为阶梯状上升(或下降),采样时间小于给定值间隔的PID测试结果如图6所示。结果表明,该算法能够满足实际的压力控制要求。
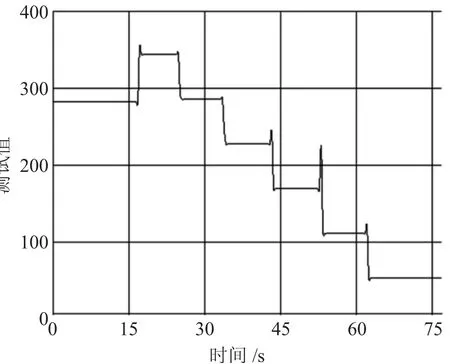
图6 PID算法测试
实测的压力曲线如图7所示,从图7可以看出,实际测量值与设置值吻合,加压过程中的压力偏差不超过0.3%,且在加压过程中上下台面的平行度保持良好,最大偏差不超过1.8 μm,结果符合设计要求。
最大偏差:1.8 μm长度计最大值:8.8 μm长度平均值:7.8 μm
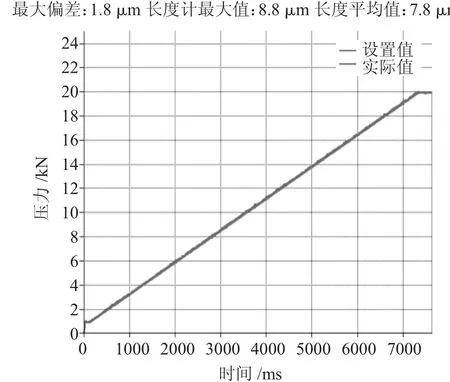
图7 实测的压力曲线
4 结束语
本文介绍了一种伺服电缸加压系统的实现方式及控制策略,通过位移控制实现了压力的精确控制,在PLC中应用PID算法对偏差值进行计算并驱动执行机构进行压力修正。通过搭建测试平台进行验证,验证结果表明,伺服电缸加压系统设计及其控制方法可以实现精确的加压控制,而且压力控制范围大,在芯片的大压力互连工艺应用中具有一定的推广意义。
