基于AMEsim/Simulink联合仿真的川藏线货物列车下坡道纵向动力学研究
2022-09-28郭炎冰杨诗卫杨璨倪文波
郭炎冰,杨诗卫,杨璨,倪文波*,
基于AMEsim/Simulink联合仿真的川藏线货物列车下坡道纵向动力学研究
郭炎冰1,杨诗卫2,杨璨2,倪文波*,1
(1.西南交通大学 机械工程学院,四川 成都 610031;2.中车眉山车辆有限公司,四川 眉山 620032)
川藏铁路线路起伏较大、长大下坡较多,对开行列车进行纵向动力学性能评估十分必要。本文建立了包括机车DK-2制动机和货车120阀在内的列车制动系统AMEsim模型,并结合Simulink建立的纵向动力学仿真模型,进行列车纵向动力学仿真,评估川藏线即将开行货运列车的纵向动力学性能,完成了下坡道紧急制动和循环制动工况的仿真分析。结果表明,机车的制动是造成纵向冲动的主要因素;由于编组较短,空气制动不同步性对列车纵向冲动影响较小;最大车钩力和加速度发生在制动刚开始时,整个制动过程列车总体运行平稳。
川藏线;制动系统;纵向动力学;联合仿真;车钩力
货物列车纵向动力学性能是评价货物列车能否平稳运行的重要指标之一,对开行列车进行纵向动力学性能评估十分必要。川藏铁路长大坡道众多,最大坡度为30‰,牵引重量受最大坡度限制[1]。因此本文对编组形式为两台HXD1重联牵引2000t货车(22辆C70E)的货物列车展开纵向动力学性能研究。
在列车的纵向动力学仿真中,制动力模型的选取对计算结果有显著影响。在目前纵向动力学的仿真中,获得制动力的方式主要有数学模型拟合法(经验法)以及经验模型与流体动力学结合法[2]。孙树磊[3]构建了列车空气制动充气特性多参数数学简化方法。魏伟等[4-5]分别使用气动理论和试验数据插值建立了制动力模型并进行纵向动力学仿真,并对比了两种制动力模型对计算结果的影响。Abdol等[6]使用利用流体动力学原理对制动管建模,采用经验公式的方式来模拟制动缸压力变化,TrainDy[7]和TsDyn[8]使用了这种方法。随着计算机仿真技术的发展,很多研究人员利用AMEsim软件进行制动机的建模,准确地模拟了制动机的制动特性。杨璨[9]和曾军[10]使用AMEsim软件对货车120型制动阀进行了建模。黄晓旭[11-12]利用AMEsim软件,分别对DK-2电空制动机和F8型空气制动机进行了建模。因此,本文拟采用AMEsim建立列车制动系统模型,以获得较为准确的各车辆制动力,通过联合仿真的方法,对川藏线货运列车纵向动力学性能进行分析。
1 120型空气制动阀模型
120型空气制动阀(120阀),是120型空气制动机的关键组成部分,直接影响货车车辆的制动系统性能。120阀具有充气及缓解位、减速充气及缓解位、常用制动位、保压位和紧急制动位等五个工作位,各个工作位分别对应不同的工作状态,通过主活塞带动截止阀和滑阀上下移动,使截止阀和滑阀上不同的孔相通或断开来控制120阀的动作。本文根据文献[9]建立120阀的AMEsim模型,如图1所示,关键参数如表1所示。

图1 120阀AMEsim模型

表1 120阀参数
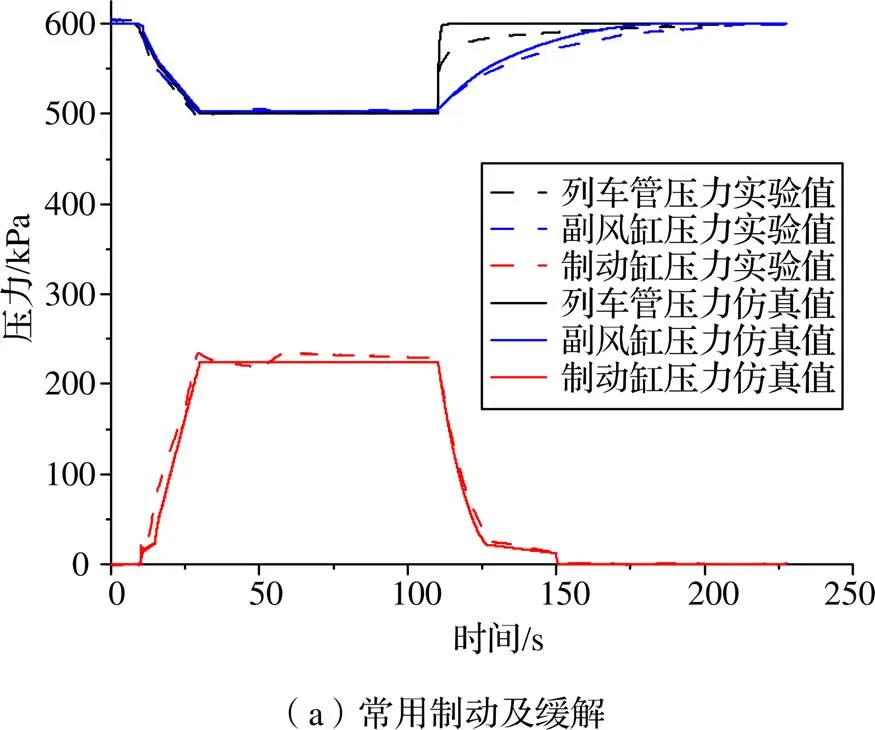
在定压600 kPa时,对建好的模型进行减压100 kPa常用制动缓解、紧急制动缓解仿真,并与文献[9]试验数据对照,结果如图2所示。
由图2可以看出,在缓解时,列车管和各个风缸充值定压时间稍快于实验值,分析原因是由于在仿真时采用理想风源,列车管升压迅速并与副风缸、加缓风缸保持一定压差,故充气较快。除此之外,制动阀内各个风缸压力曲线均与实验数据拟合较好。
2 DK-2制动机模型
新造HXD1型电力机车采用DK-2型制动系统。该制动系统主要包括制动控制器、制动系统显示屏、制动控制单元 BCU、空气制动单元 PBCU,压力传感器及压力开关等。其中,BCU是完成机车制动控制的核心模块,其工作原理为:在常用制动时,BCU接收由自动制动阀(大闸)阀出的制动信号,通过控制均衡风缸的压力变化来控制列车管压力变化,如果此时机车空气制动可用,那么由BCU计算出预控风缸的控制压力,从而控制机车制动缸压力;在紧急制动时,BCU直接控制列车管模块使列车管紧急排风,分配阀动作给容积室充气作为制动缸控制压力。本文使用的DK-2型制动机模型如图3所示[11]。另外,每台HXD1机车由两单节机车“背靠背”组成,每单节机车配备一台螺杆式空气压缩机和两个串联的500 L总风缸,单节机车的风源系统模型如图4所示[13]。空压机额定转速1770 r/min,排量3.0 m3/min。
对上述DK-2模型在定压600 kPa下进行减压100 kPa常用制动和紧急制动仿真,结果如图5所示。将仿真结果与文献[14]中试验曲线进行对比,结果表明,仿真获得的列车管、制动缸压力曲线与试验曲线拟合良好,该模型可用于机车的自动制动和紧急制动的仿真。

图3 DK-2制动机AMEsim模型
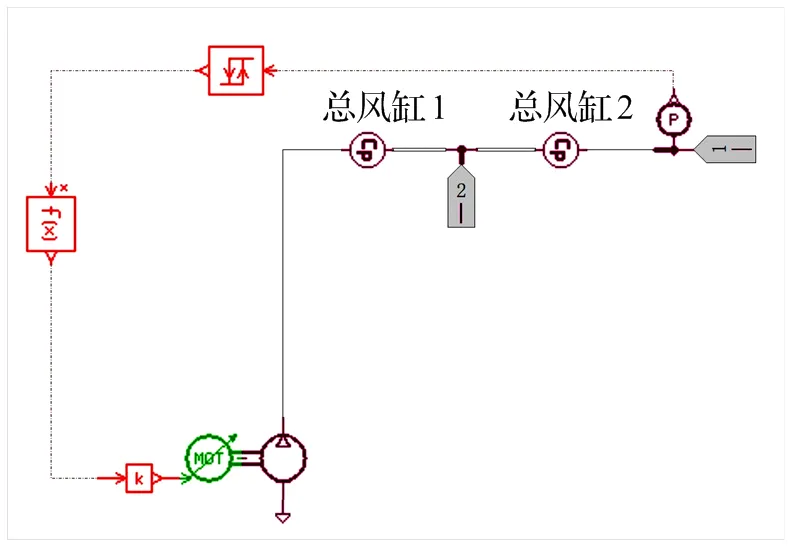
图4 单节机车风源AMEsim模型

图5 DK-2制动机仿真与试验数据对比
3 列车纵向动力学模型
列车编组是由一系列机车和车辆之间通过车钩缓冲器连接而成的多质点系统,取第节车为研究对象,对其进行受力分析可得纵向动力学微分方程为:

HXD1的电制动力模型是与运行速度有关的曲线,如图6所示。机车、车辆的基本阻力,实算空气制动力按照《列车牵引计算规程》(简称《牵规》)[15]中的规定分别计算。

图6 HXD1电制动力特性曲线
缓冲器特性也是影响列车纵向冲动水平的一个重要因素,缓冲器模型选择的合理与否直接影响仿真结果的准确性。HXD1使用QKX100型胶泥式缓冲器,C70E使用MT-2型干摩擦缓冲器。在本文的计算中,QKX100缓冲器模型使用落锤实验得到的缓冲器位移-力特性曲线[16],如图7所示。
MT-2缓冲器是摩擦式缓冲器,其阻抗力受速度影响较大,在加载末端由于速度无限接近于0,摩擦力大大增加而出现阻抗力尖峰,所以选用合理的MT-2缓冲器阻抗力模型十分关键。

图7 QKX100缓冲器特性曲线
根据文献[17]提出的MT-2缓冲器模型,进行适当改进,得到MT-2缓冲器阻抗力模型为:


在计算时,车钩力从0加载到缓冲器初压力的过程使用一段较小的位移过渡;缓冲器尾部尖峰采用附加力的方式给予补偿,利用指数函数的衰减特性可以很好地描述这种特性,公式如下:

式中:v为临界速度,m/s;=()为控制阻抗力大小的系数。
由于缓冲器是吸能结构,其在加载和卸载曲线之间存在间断点,必须进行加载卸载之间的过渡处理,本文采用速度法对加载和卸载之间间断进行过渡[19]。
使用以上MT-2模型进行落锤实验仿真,并于实验数据进行对照[17],结果如图8所示。仿真结果表明,该模型与落锤试验数据比较接近,并且能够很好的描述缓冲器在加载末端的阻抗力尖峰。
4 纵向动力学联合仿真模型
4.1 联合仿真模型
使用Simulink建立列车纵向动力学计算程序,该程序包括空气制动力计算模块、电制动力计算模块、坡道阻力计算模块、基本运行阻力计算模块、车钩力计算模块以及动力学计算模块等六部分组成,如图9所示。
接着在AMEsim软件中将建立好的120阀模型和机车DK-2制动机模型通过管路子模型和T型接头子模型连接,组成列车的制动系统模型。每台HXD1电力机车由2单节4轴机车重联构成。本文编组中,使用两台(共4节)机车重联牵引,机车重联时,各单节机车之间、机车与车辆之间通过制动管连接,各节机车总风缸使用总风联管连接;制动信号由本务机车发出(第一节机车),后部机车作为重联机车,受第一台机车控制。
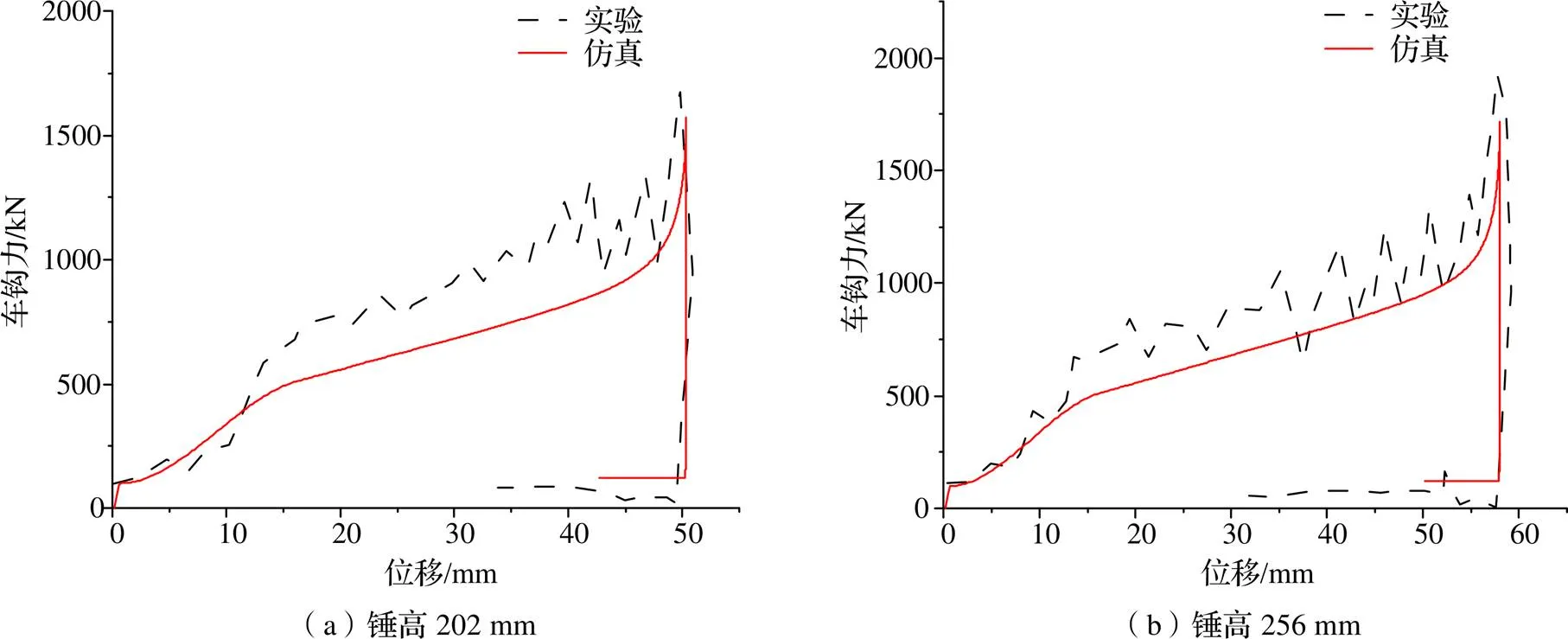
图8 MT-2缓冲器落锤实验仿真与试验数据对比

图9 用于计算纵向动力学的Simulink模型
为加速仿真,使用DYNCOSIMSHM模块将模型分割以进行并行计算,该模块能够实时获取其余模型的仿真数据,图10为两台HXD1+前5辆C70E的AMEsim与Simulink联合仿真模型。将Simulink模型使用AMEsim提供的sl2amecosim方法转换为可执行的C代码并生成AMEsim子模型,以实时获取制动系统相关参数,并与AMEsim模型进行数据交互以完成相关计算。

图10 两台HXD1+前5辆C70E的AMEsim与Simulink联合仿真模型
4.2 仿真结果
综合考虑川藏铁路线路条件、列车编组特点以及制动操纵方式,本文计算在以下条件进行:考虑潮湿工况下的黏着条件对制动力的限制;由于编组较短,故不考虑变坡点对列车纵向力的影响;优先使用机车电制动,投入不超过黏着限制的最大电制动力,电制动力上升速度 75 kN/s;紧急制动距离为1400 m,定压600 kPa,坡度-30‰,根据《牵规》计算得到在-30‰坡道下的紧急制动限速为97 km/h,制动初速选定90 km/h;串联车钩间隙取10 mm。由此,在以下两种工况下进行列车纵向动力学仿真。
4.2.1 工况1:紧急制动停车
在任何条件下,列车应具有紧急制动能力,所以,考虑当电制动失效时列车的紧急制动。工况Ⅰ的仿真结果如图11所示。图11(a)表明,最大压车钩力为389.168 kN,出现在第10钩位,制动过程中没有拉钩力产生。最大加速度1.70 m/s2,最大减速度-1.501 m/s2。结合图11(b)和图11(b)分析可知,紧急制动时,机车制动缸升压较快,机车迅速减速而车辆还没有明显减速,导致后方车辆向前涌,所以在列车制动刚开始时,列车前部受到较大压钩力作用,并于第10车出现最大车钩力,同理,加速度波动也出现在制动缸快速升压期间;随着制动缸压力上升至最大值,制动力随速度的变化缓慢增加,车钩力和加速度也缓慢变化,列车制动过程运行总体平稳;由图11(b)可以得出,列车紧急制动波速约为277.3 m/s,120阀紧急制动波速参考值为270~280 m/s之间[10],本文仿真结果和参考值范围相吻合。
4.2.2 工况2:-30‰坡道循环制动
由于川藏线长大坡道众多,最大下坡坡度达-30‰,并且机车的电制动力受到黏着条件限制,列车需要进行循环制动才能满足在-30‰下坡道的调速要求,故在-30‰的坡道上进行循环制动仿真,包含制动、投入电制动的缓解、再制动过程。计算分析可知,列车管减压80 kPa时,缓解最后一辆车副风缸充至定压约用时85 s,缓解速度为60 km/h时,可用于缓解的时间约为102 s,能够满足列车再充气时间要求。仿真结果如图12所示。

从图12(a)可知,最大压钩力387.461 kN出现在第4钩位,整个调速过程没有拉钩力产生。最大加速度为1.861 m/s2,最大减速度 为-1.467 m/s2。与紧急制动过程相似,在制动开始时,车钩力波动比较剧烈。

结合图12(b)和(c)分析,原因是由于该阶段机车电制动力上升较快,而常用制动时车辆制动缸压力上升慢于紧急制动,导致该阶段机车和车辆之间存在较大速度差,造成第4钩位出现最大车钩力,同时该阶段的加速度振荡也最为剧烈;当车辆制动缸压力不再上升,车钩力和加速度趋于平稳;当速度低于60 km/h时,后部车辆缓解,机车电制动保持,这时后部车辆随着制动缸压力慢慢降低而逐渐加速下滑,从而车钩力缓缓增加,此过程由于制动缸缓解需要一个过程,所以车钩力缓慢变化;当速度高于90 km/h时,列车再次采取空气制动,这时仅后部车辆制动缸升压,而机车电制动力不变,各车钩仍处于压钩状态,由于空气制动的不同步性,车钩力和加速度有轻微波动而后趋于稳定;随着车辆制动力逐渐增加,车辆速度降低,车钩力下降;由图12(b)可以得出,列车常用制动波速约为223.79 m/s,120阀常用制动波速参考值为219~230 m/s[10],常用制动波速仿真结果也与参考值相吻合。
5 结论
本文通过建立列车制动系统的AMEsim模型并利用此模型获得实时制动缸压力,并与Simulink联合进行纵向动力学仿真,评估了川藏线列车在限制坡道下制动工况的纵向动力学性能,得到如下结论:
(1)文献[20]中指出,货物列车在正常运行时,车钩力应小于1000 kN,纵向加速度应小于9.8 m/s2。所以,在本文的计算工况中,列车编组的纵向动力学性能满足要求。
(2)由于机车空气制动和电制动上升速率和能够提供的最大制动力均高于后部车辆,所以机车的制动是影响纵向冲动水平的关键因素。最大车钩力通常发生在制动刚开始时,并且发生在车辆前部。
[1]李伟,毕强,林世金. 川藏铁路雅安至林芝段最大坡度分析[J]. 高速铁路技术,2020,11(3):97-100.
[2]Wu Q, Spiryagin M, Cole C. Longitudinal train dynamics: an overview[J]. Vehicle System Dynamics,2016,54(12):1688-1714.
[3]孙树磊. 重载列车纵向冲动动力学研究[D]. 成都:西南交通大学,2014.
[4]魏伟,于海龙. 制动特性对重载列车纵向冲动影响的比较[J]. 大连交通大学学报,2013,34(4):1-6.
[5]魏伟,李文辉. 列车空气制动系统数值仿真[J]. 铁道学报,2003(1):38-42.
[6]Adbol-Hamid K S, Limbert D E, Gauthier R G, et al. Simulation of freight train air brake system[C]. ASME. Proceeding of the ASME Winter Annual Meeting,1986:5-9.
[7]Cantone L. TrainDy: The New Union Internationale des Chemins de Fer Software for Freight Train Interoperability[C]. Proceedings of the Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit. 2011,225(9):68-71.
[8]Belforte P, Cheli F, Diana G, et al. Numerical and experimental approach for the evaluation of severe longitudinal dynamics of heavy freight trains[J]. Vehicle System Dynamics,2008,46(S1):937-955.
[9]杨璨. 货运列车制动系统的建模及仿真研究[D]. 成都:西南交通大学,2010.
[10]曾军. 货运列车空气制动系统特性试验及仿真研究[D]. 湘潭:湘潭大学,2019.
[11]黄晓旭. 动力集中动车组制动系统仿真与研究[D]. 成都:西南交通大学,2020.
[12]黄晓旭,倪文波. 普通旅客列车电空制动系统建模及仿真分析[J]. 机械,2019,46(3):48-52.
[13]项宇航. 重载列车机车风源系统研究[D]. 大连:大连交通大学,2010.
[14]齐洪峰,黄晓旭,倪文波. DK-2型制动机建模与试验分析[J]. 铁道机车车辆,2020,40(5):14-18.
[15]国家铁路局. 列车牵引计算规程:TB/T 1407-2018[S].
[16]杨辉,原俊荣,付雅婷,等. 重载列车QKX100与MT-2缓冲器动态特性[J]. 北京工业大学学报,2020,46(9):1018-1026.
[17]赵旭宝,魏伟,张军,等. 缓冲器分段阻抗特性对重载列车纵向冲动的影响[J]. 铁道学报,2017,39(10):33-42.
[18]刘嘉. 缓冲器建模对列车纵向动力学仿真的影响研究[D]. 成都:西南交通大学,2019.
[19]吴庆,罗世辉,马卫华,等. 重载电力机车钩缓系统建模研究[J]. 铁道机车车辆,2012,32(4):15-19.
[20]《铁路货车概要》编委会. 铁路货车概要[M]. 北京: 中国铁道出版社,2020.
Study on Downhill Longitudinal Dynamics of Freight Train on Sichuan Tibet Line Based on AMESim / Simulink Co-simulation
GUO Yanbing1,YANG Shiwei2,YANG Can2,NI Wenbo1
( 1.School of Mechanical Engineering,Southwest Jiaotong University,Chengdu610031, China;2.CRRC Meishan Co., Ltd., Meishan620032, China )
The topographic conditions along the Sichuan-Tibet Railway are extremely rough with many ups and downs and long steep downhills. It is necessary to evaluate the longitudinal dynamics performance of the trains on this railway line. In this paper, the AMESim model of the train braking system including the locomotive DK-2 brake and the wagon 120 valve is established. And combined with the longitudinal dynamics simulation model established by Simulink, the evaluation of the longitudinal dynamics performance of the freight train on the Sichuan-Tibet Railway and the analysis of the train's emergency braking and cycle braking on the downhills are conducted. The results show that the locomotive braking is the main factor leading to the longitudinal impulse, and the different synchronicity of air braking has little effect on the longitudinal impulse due to the short train formation. The coupler force and acceleration are maximal at the beginning of braking, and the overall running of the train is stable during the whole braking process.
Sichuan-Tibet railway;braking system;longitudinal dynamics;co-simulation;coupler force
U270.1+1
A
10.3969/j.issn.1006-0316.2022.08.008
1006-0316 (2022) 08-0047-08
2021-10-19
四川省科技计划资助项目(2019ZYZF0034)
郭炎冰(1997-),男,河南新乡人,硕士研究生,主要研究方向为列车动力学,E-mail:13569012049@163.com。*通讯作者:倪文波(1969-),男,云南建水人,博士,教授,主要研究方向为列车制动技术、列车主动控制,Email:nwb@home.swjtu.edu.cn。
