基于耦合电感的永磁同步电机容错控制方法
2022-09-28王思仲贾文超
王思仲,贾文超
(长春工业大学电气与电子工程学院,吉林 长春 130012)
1 引言
永磁同步电机[1]在航空航天、舰船潜艇、汽车等领域具有广泛应用。近年来,由于日益严峻的环境能源问题,永磁同步电机的重要性备受关注且与日俱增。各相关领域对永磁同步电机的安全可靠性要求也越来越高,要求电机具有理想的容错运行能力[2],该能力指电机本体及其控制系统某个环节出现故障,则能够利用设备冗余或采取合理的容错控制措施,使电机仍旧可以保持稳定运行的一种能力。常见永磁同步电机优点是高功率因数、高功率密度、高可靠性、良好的容错能力。快速发展的微电子与现代电力电子技术推动了永磁同步电机容错技术的更新升级,使系统安全可靠性受到越来越多的重视[3]。
文献[4]针对永磁同步电机矢量控制系统中存在的电流传感器故障问题,提出一种基于矢量旋转的故障诊断方法。该方法基于不同轴定向的坐标系,根据对应的定子电流分量,对各相电流传感器故障信息进行判定,依据坐标系下逻辑判断机制,利用合适的反馈电流,重构永磁同步电机矢量控制系统,利用电流估计算法,防止反馈电流与指令值之间发生恒等于现象,确保出现故障后,电机仍可以平稳运行。该方法可有效对永磁同步电机故障进行诊断,但该方法未过多考虑容错问题,存在一定局限性。文献[5]以电动汽车续航里程、安全可靠性以及运行特性为优化目标,构建出一种电动车用的多盘式永磁同步电机协同优化与容错控制方法。该方法通过构建多盘式永磁同步电机的数学模型,以效率MAP(Manifold Absolute Pressure Sensor,进气压力传感器)图为基础,对效率优化控制策略展开设计,分析电机的容错控制性能,基于效率优化,架构出转矩协同控制方法,通过模糊控制来改进转矩波动,实现容错控制。但该方法在模糊控制中存在控制波动较大,难以提升永磁同步电机容错能力。
基于上述传统方法中存在的局限性,本文以耦合电感为研究基础,提出一种永磁同步电机容错控制方法。耦合电感是指在两个或以上的线圈内,当各线圈生成的磁通均与另一个线圈相交,且是静止状态,线圈内电阻与匝间的分布电容也可被忽略时,这些线圈将属于一种理想化状态的耦合电感元件。本文方法对提升电机转矩输出能力起着积极的推动作用;构建耦合电感磁链模型,为后续容错控制方法设计奠定基础;通过取得极大程度幅值的输出转矩,赋予推进系统较大的输出功率与调速范围,降低对电机正常运行的干扰,令电机原本作用得到充分发挥;增设对应且合理的约束方程,使方程组解具有唯一性,提升容错控制效果。与传统方法相比具有一定优势。
2 永磁同步电机耦合磁链模型构建
永磁同步电机的磁链中存在磁路交叉耦合电感,而产生的交叉耦合效用将直接影响电磁转矩[6-7],且电机转矩越大,影响力越强。所以,以永磁同步电机处于大转矩运行状态为前提,构建出耦合电感下的磁链模型,为后续容错控制方法设计奠定基础。
不失一般性,永磁同步电机的d、q轴磁链模型常用下列表达式描述
(1)
式中,d、q轴磁链用ψd、ψq表示,d、q轴电流用id、iq表示,其电感用Ld、Lq表示,永磁体生成磁链用ψpm表示。
采用下列计算公式求取电磁转矩Tem

(2)

若忽略磁路饱和状态,则电感Ld、Lq与永磁体生成磁链ψpm均为常数;反之,若将磁路饱和情况作为考虑因素,则电感Ld、Lq是电流id、iq的函数。
基于永磁同步电机交叉耦合作用[8],改写式(1)为
(3)
式中,对于d轴,其电流生成的自感磁链为ψdd,由于交叉耦合生成的q轴磁链为ψqd;同理,对于q轴的自感磁链与d轴磁链分别为ψqq、ψdq;磁路饱和会导致永磁体磁路不对称,此时得到的d、q轴磁链分量分别为ψd,pm、ψq,pm。
将式(3)磁链方程用电流、电感等参数加以描述,得出下列表达式

(4)
式中,d轴自感与q轴交叉耦合电感分别用Ldd、Lqd表示,q轴自然与d轴交叉耦合电感分别用Lqq、Ldq表示。
整理合并上式与电磁转矩Tem计算公式,推导出下列交叉耦合电磁转矩表达式为

(5)
式中,永磁转矩为Tpm,不失一般性的磁阻转矩与交叉耦合产生的磁阻转矩分别是Trel1、Trel2,两者之和即为总磁阻转矩Trel。
3 永磁同步电机容错控制
基于构建的耦合磁链模型,研究永磁同步电机的容错控制方法,既要确保容错运行状态下电机输出转矩稳定,还需控制输出转矩脉动保持在尽可能小范围内。通过取得极大程度幅值的输出转矩,赋予推进系统较大的输出功率与调速范围,降低对电机正常运行的干扰,令电机原本作用得到充分发挥。
电机出现故障后,在耦合电感影响下,合理调整故障后电机剩余的正常电流矢量幅值与相位。经过容错控制后随时间变化,电机各相绕组通入电流矢量的瞬时表达式:
(6)
式中,故障运行状态下接入的电机定子绕组电流幅值是Im,经过容错控制调整,与电流矢量ie、if、ig、ih相对应的空间重分布相位值分别是β、γ、δ、ε。
若令故障前后磁动势不变,要在电机出现A相绕组开路故障时保证电机圆形旋转磁势在故障前后不发生改变。因此,为达到该控制目的,使电机其它能够正常运行的各相绕组磁动势等同于正常运行的电机,且令下列所示的圆形旋转磁场生成条件成立,即

(7)

采用三角函数[9-10]将上式指数表达式改写成复数形式,使等号两边虚实一致,表达式为

(8)

(9)
通过上列两个方程式可以看出,其构成方程组的解不具有唯一性,需增设对应且合理的约束方程。
令∑im(t)=0,防止单相开路故障的容错控制连接永磁同步电机中线,故设立下列约束条件为
ie+if+ig+ih=0
(10)
β+γ=π
(11)
令各相电流瞬时表达式具有相同幅值,以确保空间中的电机各相绕组电流矢量呈对称分布,且能够为系统提供电力[11]。因此,将下列各式设定为电机出现A相绕组开路故障的约束条件
ie=-ig
(12)
if=-ih
(13)
通过结合上述两个约束条件,将经过容错控制的电机各相绕组接入电流,用下列表达式进行描述

(14)
由以上各式,综合计算上式方程组后,得到下列容错运行过程中,随时间变化的各相电流矢量瞬时[12]表达式

(15)
根据上列方程组可知,当发生A相绕组开路故障时,利用电流容错控制方法,可适当调整其它各相电流矢量幅值与相位,重新分布空间相位,且符合圆形旋转磁场的必要条件。
4 仿真分析
4.1 实验环境及参数
为验证所提方法的有效性,进行仿真分析。采取130BH55E型号的五相混合式永磁同步电机,在MALTAB平台上进行,实现操作系统为WINDOWS XP,运行内存为8GB,CPU 为3.6 GHz,实验用电机参数如表1所示。

表1 混合式永磁同步电机参数
4.2 实验结果分析
4.2.1 码道故障分析
为验证所提方法的有效性,实验分析了所提方法的对电机码道故障分析,实验结果如图1 所示。
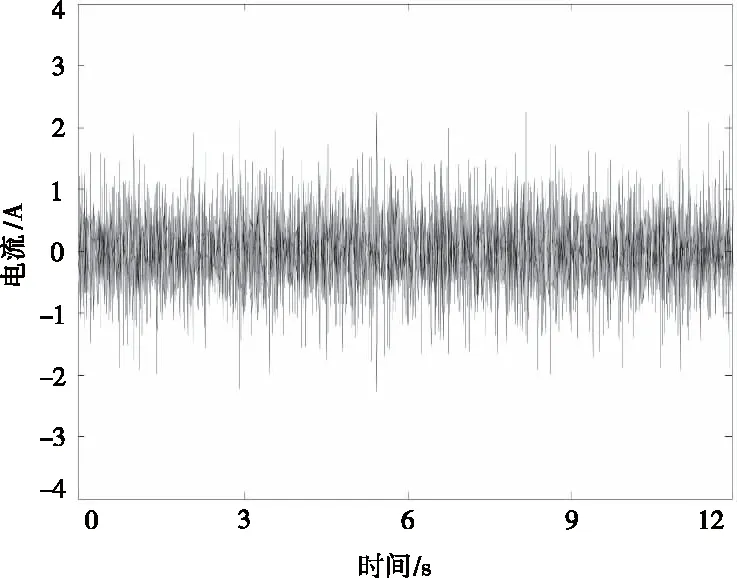
图1 容错控制效果
分析图1结果可以看出,实验中电机的定子电波形比较稳定,这是由于所提方法结合了永磁同步电机的交叉耦合作用,利用磁链模型取得了交叉耦合电磁转矩,根据得到的极大程度幅值输出转矩,将较大的输出功率与调速范围赋予推进系统,并增设了合理的约束方程,使构建的方程组解值具有唯一性,令各相电流瞬时表达式具有相同幅值,因此,本文方法有效检测并处理了电机故障,抑制了码道故障产生的影响。综上所述,说明本文方法具有一定的稳定性与鲁棒性。
4.2.2 断路故障分析
设定5rad/s是定期望转速,若条件概率变化率取值0.999,则短路故障下的转速预估准确率是73.7%,转速采集准确率约是67%,则断路故障下的容错控制效果如图2所示。

图2 容错控制效果
从波形图中可以看出,本文控制方法对断路故障具有有效性,可以准确检测出断路故障的故障种类,通过过滤了转速采样周期中的数据坏点,成功判定该故障为断路故障,经过令故障前后磁动势不变,使电机其它能够正常运行的各相绕组磁动势等同于正常运行的电机,且满足圆形旋转磁场生成条件,防止单相开路故障的容错控制连接永磁同步电机中线,空间中的电机各相绕组电流矢量呈对称分布的同时为系统提供电力,所以,控制效果较好。这说明本文控制方法可有效抑制断路引发的震荡影响,具有可行性与有效性。
4.2.3 有限元模拟分析
为进一步验证所提方法的有效性,实验采用有限元分析软件ansoft模拟电机本体,获取更精准的控制结果。取得实验用电机的空载反电势波形,通过谐波分析,得到反电势谐波分量与基波分量比。如图3 所示。

图3 电机空载反电势波形与谐波分析
假设电机各相电流在正常运行状态下的幅值为6A,电机转速是500 r/min,有限元仿真分析不同容错控制方法的效果,各方法对应的电磁转矩曲线如图4所示。

图4 有限元仿真结果
通过分析图4可以看出,本文方法因考虑了永磁同步电机的交叉耦合作用,构建了用电流、电感等参数描述的磁链模型与交叉耦合电磁转矩模型,分析了耦合电感,既确保了容错运行状态下电机稳定输出转矩,还将输出转矩脉动控制在了尽可能小的范围内,降低了对电机正常运行的干扰,令电机原本作用得到充分发挥,基于耦合电感,合理调整故障后电机剩余的正常电流矢量幅值与相位,使电机圆形旋转磁势在故障前后不发生改变,因此,相对比文献[4]、[5]方法,具有更理想的容错控制效果,电机运行更加平稳。
5 结论
电力电子技术稳步发展,使电机日益打破供电相数的局限,为电机后续的深入研究与应用领域扩展奠定了基础。其中,永磁同步电机就凭借其高能量密度等诸多优势,广泛应用于航空航天等各大领域。本文以永磁同步电机为研究对象,提出一种耦合电感的容错控制方法。该方法通过构建永磁同步电机耦合磁链模型,以及合理调整故障后电机剩余正常电流矢量幅值与相位,令电机能够正常运行的各相绕组磁动势等同于正常运行的电机。验证了控制方法的有效性,具有一定优势性能。
但因个人能力等局限性,方法中存在遗漏与缺失,应在今后的工作中继续深入探索,令容错控制方法更加完善;应以电机矢量容错控制为研究视角,检验控制方法的精准度;应在模拟实验过程中,针对性地对其它多相电机故障容错控制方法展开探析,考察本文控制方法的适用性;故障状态较多,本文只考虑了几种常见故障,下一步应对其它故障状态的对应检测方法与容错控制方法进行研究。