改进免疫PID核电站稳压器控制系统仿真研究
2022-09-28马敏阳
段 宇,马敏阳,薛 锐
(南京工程学院能源与动力工程学院,江苏 南京 211167)
1 引言
压水堆核电站稳压器控制系统的主要作用是:控制稳压器内的压力和水位在预期的规定值附近范围内变化,从而保证压水堆核电站一回路的压力在设定值附近变化[1]。由此可见,稳压器的压力和水位的控制水平对整个核电站运行的安全性和经济性有着重要影响。而由于核电站稳压器本身具有惯性较大、容易受到运行时温度压力等各种因素干扰、系统比较复杂且具有非线性、其系统的传递函数难以获取等特性,所以采用传统的PID控制器及其参数的整定方法往往会出现控制系统的调节时间过长、控制系统稳定性较差、鲁棒性较差等问题,使稳压器控制系统的调节效果较差,进而会影响到压水堆核电站整个一回路的安全、稳定运行。因此有必要对稳压器水位和压力的控制采用其它先进的控制方法或将其它先进控制方法与传统PID控制结合使用,以提高其控制水平。
生物免疫系统具有在经常受到外界病毒、细菌及其它各种环境因素干扰时,保持自身系统稳定性的能力,其系统的鲁棒性较强。而将根据生物系统免疫原理的免疫控制器与传统PID控制器结合使用,可以构造出免疫PID控制器。免疫PID控制是一种非线性控制器,它具有结构比较简单、适应性强的特点,在难以获得精确非线性控制对象传递函数模型的过程控制中可以取得比较满意的控制效果。但传统的免疫控制器与常规PID控制器结合使用时,PID控制器中的三个控制参数只能以相同的比例变化,这会影响到其控制器的调节效果。对此,本文提出一种改进型免疫PID控制器并采用差分进化算法来对控制器中的关键参数进行优化,并将这种控制器应用到稳压器压力和水位的控制中,以提高其控制品质。
2 核电站稳压器控制系统
稳压器主要是用来控制核电站一回路的压力并为一回路提供高压和低压保护,也就是将一回路的压力限定在压水堆核电站正常运行时允许的范围内,它的控制对象主要包括稳压器的压力和水位[2]。稳压器压力控制系统主要是负责压水堆在负荷稳定或负荷按设计要求变化时,将压水堆的压力控制在设定值15.5MPa附近,从而保证整个压水堆一回路冷却剂的压力能够达到设计要求。根据其控制对象的动态特性,其传递函数可以用一个二阶惯性环节来表示,通过查阅相关资料,具体传递函数模型选取如下[3]

(1)
式中:S——拉普拉斯算子;
稳压器水位控制的主要任务是在核电站压水堆工况稳定或按要求进行变化时通过稳压器相关阀门的调节使稳压器水位维持在设定值附近,以保障核电站的安全运行。稳压器水位的传递函数可以根据其动态特性,用一个二阶惯性加延迟环节来表示,其参数具体选取如下[3]

(2)
3 改进免疫PID控制器的设计
3.1 常规免疫PID控制器
生物免疫反馈的原理是:当病毒、细菌等对生物体有害的抗原,由于生物体疲劳、受凉或者受热等原因入侵生物机体并不断繁殖到生物的整个机体后,生物机体免疫系统中的T细胞通过调节自身辅助细胞TH和抑制细胞TS的数量来控制免疫B细胞产生的数量,以消除病毒、细菌等抗原的抗体,进而保证生物个体的健康[4]。B细胞的浓度与抗原浓度的关系式为:
S(k)=K{1-ηf[s(k),Δs(k)]}ε(k)
(3)
式中:K——促进因子;η——免疫系统中的T细胞受到抗原入侵后调节TS和TH的系数;f(·)——非线性函数,用来表示B细胞对病毒、细菌等的抵抗能力;S(k)——B细胞浓度的变化率。
根据上述免疫反馈原理,可以提出免疫控制器,它的离散化控制器输出如下
u(k)=K{1-ηf[u(k),Δu(k)]}e(k)
(4)
式中:u(k)——控制器的输出;△u(k)——控制器输出的变化率;e(k)——控制系统的偏差。
将(4)式的免疫控制器与PID控制器结合使用就得到免疫PID控制器,其输出可表示为
(5)
式中:Kp、Ki和Kd——PID控制器的参数;K′——免疫控制器的作用系数。
其中K′可以表示为[5]:
K′=K{1-ηf[u(k),△u(k)]}
(6)
式中K、η——免疫控制器中的常数。
免疫控制器中表示B细胞抵抗能力的函数f(.)可以用二维模糊控制器来实现,它具有2个输入和1个输出。
模糊控制器采用控制对象的输出值u(k)和其输出变化率△u(k)作为输入,模糊控制器的输出值就是函数f(.)的输出。模糊控制器的输入输出的论域大小通过模糊控制器输入增益Ku、Kdu以及输出增益Ku1的大小来调节。模糊控制器的输入量u(k)、输出量f(·)被模糊化后可表示为“正P”、“零Z”和“负N”;模糊控制器的输入量△u(k)被模糊集模糊化后表示为“正P”和“负N”两个量。模糊控制器的输出量f(.)及输入量u(k)的隶属度函数如图1表示;输入量△u(k)的隶属度函数如图2所示。具体的模糊规则如下[6]:
1) if u(k) is P and △u(k) is P then f is N;
2) if u(k) is P and △u(k) is N then f is Z;
3) if u(k) is Z and △u(k) is P then f is N;
4) if u(k) is Z and △u(k) is N then f is P;
5) if u(k) is N and △u(k) is P then f is Z;
6) if u(k) is N and △u(k) is N then f is P。

图1 输入量u(k)、输出量f(.)的隶属度函数
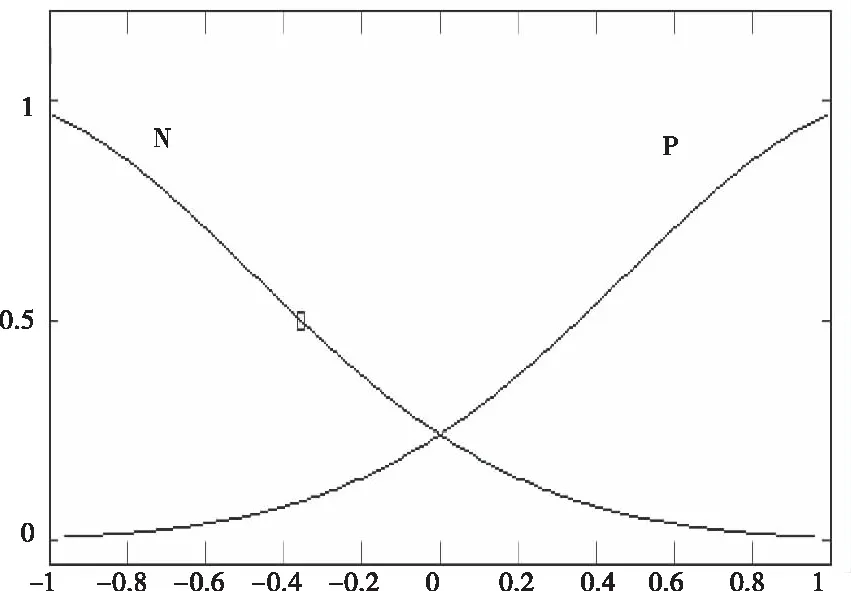
图2 输入量△u(k)的隶属度函数
3.2 改进免疫PID控制器
由生物免疫原理而设计的免疫控制器主要受对象输出和输出的变化率影响较大,而并不完全依赖于控制对象的模型,因此将它与常规PID结合设计而成的一般免疫PID控制器也具备一定的鲁棒性。但由(5)式可知,一般的免疫PID控制器中的免疫控制器只能以相同的效果作用于PID控制器中的比例增益Kp、积分增益Ki和微分增益Kd三个参数,也就是说这三个参数只能以相同的比例变化。然而在实际中由于控制对象不同,经常会要求PID中的三个参数以不同的规律进行变化,所以一般的免疫控制器作用于控制对象时,控制系统经常会由于受到各种干扰而使系统的稳定性变差、调节时间变长。因此本文设计一种改进型免疫PID控制器,它将免疫控制器的输出乘以不同的系数再作用于常规PID中的三个参数,这样PID中的3个参数可以根据具体的控制要求采取不同的规律进行变化,以取得更好的控制效果。改进型免疫控制器的输出可表示为

(7)
式中:Kp1、Ki1、Kd1——改进免疫PID中可以变化的控制器3个参数。
Kp1、Ki1、Kd1的具体形式为

(8)
式中:Kp′——改进免疫控制器用来调节PID中比例增益系数;
Ki1′——改进免疫控制器用来调节PID中积分增益系数;
Kd1′——改进免疫控制器用来调节PID中微分增益系数。
从改进免疫PID的数学表达式(7)和(8)中可以看出改进免疫PID控制器中需要整定的参数比较多,主要包括常规PID控制器中的Kp、Ki和Kd以及改进免疫控制器中的Kp′、Ki1′、Kd1′、η、Ku、Kdu、Ku1(其中Ku、Kdu、Ku1是用来表示f(.)的模糊控制器的输入输出的3个参数)。而本文所采用的整定办法是:
1)对于常规PID控制器的参数采用工程上常用的衰减曲线法进行整定,并依据工程经验对整定的结果进行调整,最后其控制器参数的整定结果为:对于稳压器压力的控制Kp=187.5、Ki=26、Kd=450;而对于稳压器水位的控制Kp=6、Ki=0.05、Kd=160。
2)对于免疫控制中的参数η、Ku、Kdu可以根据一般免疫控制器的整定方法根据经验进行整定,具体整定的结果为:对于稳压器压力的控制:η=0.9、Ku=4.13、Kdu=5.63;对于稳压器水位的控制:η=0.7、Ku=0.8、Kdu=20。
3)而对于改进免疫PID的参数Kp′、Ki′、Kd1′没有一定的整定原则可寻,而依据经验法来整定需要花费大量时间并且整定的参数常常不能满足控制的要求。对此本文采用智能优化算法中的差分进化算法来整定改进免疫PID控制器中的参数Kp′、Ki1′、Kd1′,使其参数更加适应稳压器对其压力和水位的控制要求,以获得更好的调节效果。
3.3 基于差分进化算法的参数优化
差分进化算法(Differential Evolution,DE)是一种采用浮点矢量编码在连续空间进行随机搜索的群智能优化算法,而DE改进免疫PID控制器优化算法将控制器参数的整定问题转变为对本文改进免疫控制器中参数Kp′、Ki′、Kd′优化问题的求解,它实质上是一种改进型的贪婪遗传算法[7]。DE算法的原理简单,参数设置少,易于编程实现。实验研究表明,DE算法在用标准函数测试及实际应用领域上的性能都超越了PSO、GA等多种知名优化算法。用于改进免疫PID控制器中参数Kp′、Ki′、Kd′整定的DE算法参数优化问题本质上是以控制系统输出响应的性能指标作为目标函数的优化,其具体步骤如下[8]:
1)DE参数设定,初始化种群。根据经验设定DE算法中的参数值,包括:变异因子F、交叉因子cr、种群的数量size、进化的代数G、需要优化的控制器参数的个数及每个参数的大致取值范围等。采用实数编码的方式,利用rand()函数在每个控制器参数的取值范围内随机产生每个控制参数作为初始种群NP。
2)计算适应度函数J,针对本次改进免疫PID控制器中参数的整定,为了兼顾控制系统的各项性能指标采用ITAE指标作为适应度函数J

(9)
式中:t——控制系统的时间;
e(t)——控制系统在t时刻的误差。
3)变异操作。变异是DE算法优化过程中的关键步骤,本次变异是从种群中随机选择4个不同的个体,分别设为b1、b2、b3、b4且满足b1≠b2≠b3≠b4以及种群中的最优个体BestS,则
hij=BestS+F*(xb1j-xb2j+xb3j-xb4j)
(10)
式中:F——缩放因子;
hij——种群在第j代中新产生的变异个体;
Xij——i=b1、b2、b3、b4为种群中的4个不同个体。
4)交叉操作。为了进一步增加优化种群的多样性,DE算法依据交叉概率因子cr得到下一代新的个体

(11)
式中:t——差分进化的当前代;
t+1——进化的下一代;
K——种群第i个个体对应的系数,uij(t+1)表示交叉后种群个体;
xij(t)——原来的种群个体;
vij(t+1)——执行交叉操作后产生的下一代新的个体。
5)选择操作。DE算法根据适应度函数的值采用“优胜劣汰”的选择操作以保证种群不断在全局来进化

(12)
6)通过步骤3)到5)种群进化到下一代并反复循环,直到算法迭代次数t达到设定的种群代数,算法结束。
采用上述DE算法对本次设计控制器的相关参数进行寻优,寻优的具体过程是对于压水堆稳压器压力和水位的控制,差分进化算法的初始参数都选择F=1.5,cr=0.6,size=30,G=30,其控制系统的输入信号为单位阶跃输入信号,经过循环迭代优化后得到对于稳压器压力控制器参数:Kp′=30.05、Ki′=40、Kd′=19.47,此时DE算法的最佳适应度函数值BsJ=7134.2;而对于稳压器水位控制器也通过DE算法得到优化的具体参数:Kp′=0.4573、Ki′=0.1、Kd′=0.4397,此时最佳适应度BsJ=2.859。
4 稳压器控制系统仿真结果及分析
为了验证本次设计的改进型免疫PID稳压器控制系统的控制效果,本文对压水堆核电站稳压器的压力和水位分别采用常规PID控制器、一般免疫PID控制器和本次设计的改进型免疫PID控制器进行控制;并且在matlab软件中的simulink环境下对控制系统进行仿真研究,得到稳压器压力控制系统的输出响应曲线如图3所示,稳压器水位控制系统的输出响应曲线如图4所示。

图3 稳压器压力控制系统的曲线
对图3中的曲线1(常规PID稳压器压力响应)、曲线2(一般免疫PID稳压器压力响应)和曲线3(改进型免疫PID稳压器压力响应)的控制系统质量指标进行计算如表1所示。从表1可以看出对于稳压器的压力控制:三种控制方法的稳态误差都为0,说明它们的控制准确性都很好;而采用常规PID控制时系统的衰减率比较小,超调量比较大,说明其控制的稳定性较差,而一般免疫PID和改进型免疫PID控制稳定性都较好;从调节时间上看,改进型免疫PID的快速性最好,常规PID控制系统的快速性最差。从上述控制系统的各项性能指标可以看出,本次设计的改进型PID在控制稳压器压力时可以取得较好的控制效果。

图4 稳压器水位控制系统的曲线
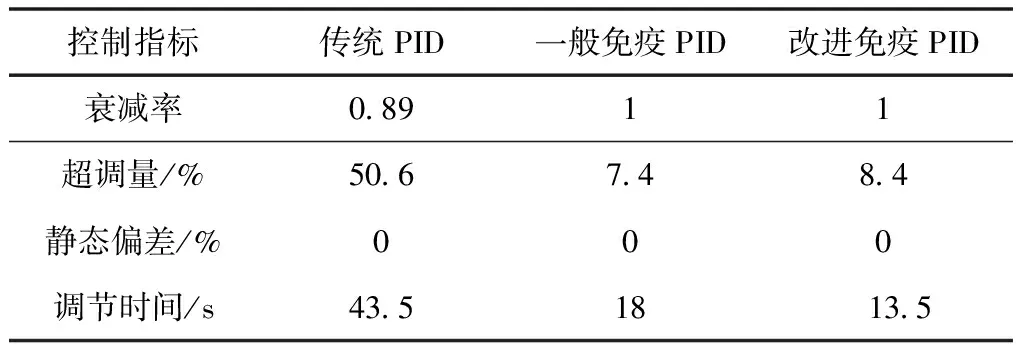
表1 压力控制器的动态性能指标
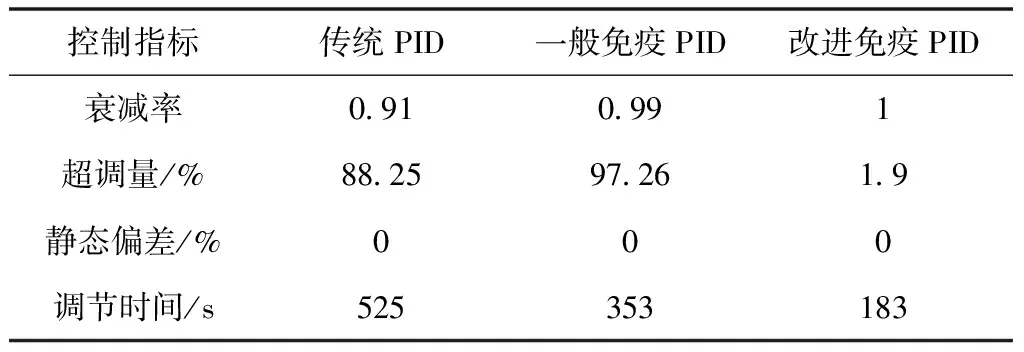
表2 水位控制器的动态性能指标
同样分别对图4中的曲线1(常规PID稳压器水位响应)、曲线2(一般免疫PID稳压器水位响应)和曲线3(改进型免疫PID稳压器水位响应)的控制质量指标计算如表2所示。从表2中可以看出对于稳压器的水位控制:三种控制方法的准确性都很好,但改进型免疫PID控制器在衰减率、超调量、调节时间这些质量指标上都明显优于其它两种控制算法,也就是说采用改进型免疫PID的稳压器水位控制系统具有更好的快速性和稳定性。
5 结束语
本文在对压水堆核电站稳压器的压力和水位控制系统进行分析的基础上,针对其模型的参数经常随时间变化以及非线性、大迟延的特点,对其采用PID控制经常会出现调节时间较长,系统不够稳定等问题,引入了基于DE算法进行参数优化的改进型免疫PID控制器。通过matlab中的simulink仿真结果表明,改进性免疫PID控制器与常规PID控制器及一般免疫PID相比较调节性能更好,可以应用到具有非线性、大迟延的核电站稳压器系统控制系统中。但本文的传递函数模型与真实被控对象的输出特性之间还具有一定差距,以及如何消除压水堆核电站稳压器在实际工作过程中压力和水位的相互耦合对其控制性能的影响等问题在设计控制系统时还值得进一步研究,以提高稳压器的控制性能指标,保证压水堆核电站的安全、经济运行。