基于小车式起落架地面滑跑振动仿真分析
2022-09-28张振华李胜军
张振华,李 巍,谢 彦,李胜军
(第一飞机设计研究院,陕西 西安 710089)
1 引言
根据波音统计,飞机起降只占飞行时间的6%,但是事故却占41%以上[1]。刹车引起起落架振动问题,是飞机地面动力学面临的关键性的问题之一。随着近几十年来航空事业的高速发展,越来越多的新型飞机大量涌现。飞机逐渐向大型化发展,起飞重量越来越大,小车式起落架广泛应用在大型飞机上。因此,研究小车式起落架的振动问题具有重要的工程意义。通过对振动的分析,找到有助于减弱振动的措施,有助于延长制动装置和起落架的使用寿命,提高飞机在着陆滑跑过程中的安全性。
国内外学者对地面滑跑和仿真建模问题已做过大量研究,Fong,A.和 Eng,P.利用多体系统动力学仿真分析软件ADAMS研究了飞机起落架系统的振动问题[1]。Chris Hetreed[2]利用多体动力学软件MSC.ADAMS/AIRCRAFT模块对飞机机轮振动进行了仿真研究。众多研究分析表明,制动力矩的增加和转子与定子的相对角速度的减小是导致振动的主要原因。国内学者对起落架振动问题起步较晚,但也进行了大量的研究。吴华伟等人[3]针对飞机在着陆滑跑的过程中主起落架和刹车机轮的受力进行了详细分析,从制动引起的谐振机理以及防滑刹车系统的角度来出发,并且就跑道的识别、智能化的控制技术、多偏压级的调节(PBM)技术、机轮速度的采集以及滤波和防振加固等方面,都介绍了相关的能够有效解决刹车诱导振动的手段和方式。徐妩佳[4]通过设计了一种用于单支柱多轮起落架的车架稳定系统,有效减弱了滑跑过程中车架振动问题。侯赤[7]通过ADAMS 对小车式起落架进行仿真,证明了基于ADAMS的起落架仿真技术相对于传统方法而言,具有过程简单,可视化强,通用性好和准确度高的优点。
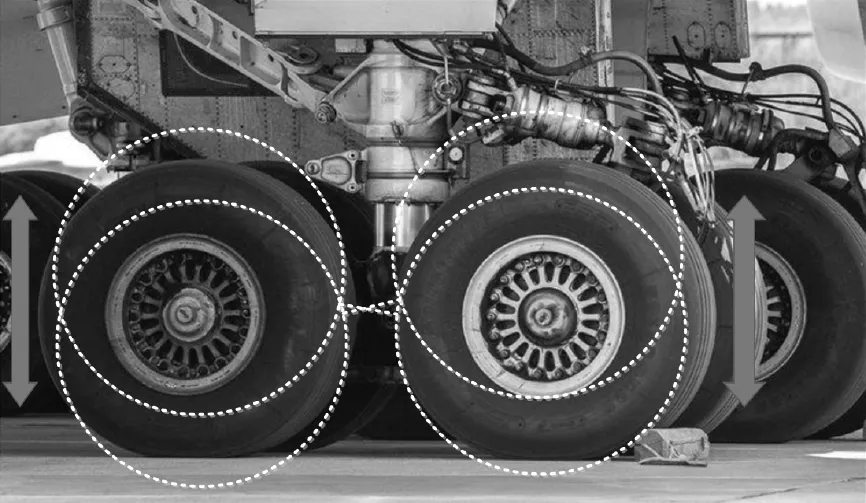
图1 车架俯仰振动示意图
国内外对于起落架的相关研究很多,但是关于小车式起落架车架的振动问题及抑制措施研究较少。本文在其他学者研究基础上,基于四轮小车式起落架,分析其缓冲器的动力学特性,使用LMS Virtual.Lab建立起落架的多体动力学模型。利用MATLAB中的Simulink模块建立防滑刹车控制系统模型,进行联合仿真。计算落震和刹车两种工况引起的车架俯仰振动,对计算结果进行分析,并提出抑制振动的措施。
2 起落架动力学分析
飞机起落架刹车振动问题是一个综合了飞机运动、起落架振动、防滑刹车控制律、刹车动态响应、轮胎动态特性等多个方面的综合课题,需综合起来进行考虑。小车式起落架除了主缓冲器以外,又增加了辅助缓冲器,还有刹车平衡装置。主缓冲器的下端与车架铰接,在车架上装有前轮轴和后轮轴,每个轮轴上对称的安装两个或多个机轮。由于多了一个车架绕接头转动的自由度,虽然辅助缓冲器的存在可以抑制这个自由度的运动,但在刹车力矩的持续激励下,依然会导致车架产生剧烈的俯仰振动。
常用的起落架系统主要由支柱、缓冲器、扭力臂、轮胎、机轮(含刹车装置)等组成。主缓冲器起到支撑和缓冲的作用,这些结构可以改善飞机的垂直方向和水平纵向的受力情况。为了研究的方便,将不考虑侧风和非对称着陆的影响。本文将小车式起落架模型简化为一个质量-阻尼-弹簧系统。
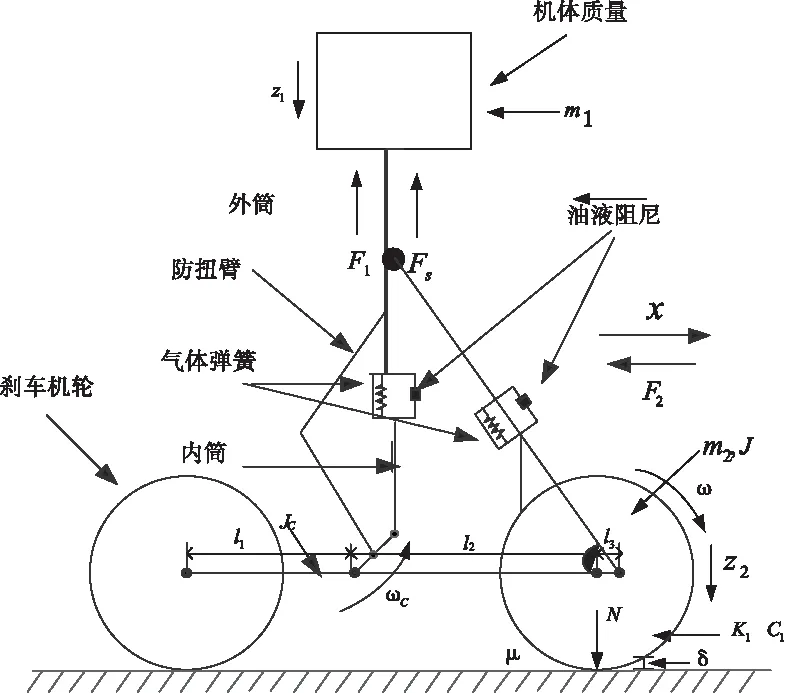
图2 起落架简化示意图
机轮与道面之间的正压力
N=K1δ+C1δ
(1)
K1轮胎刚度,C1轮胎阻尼系数,δ为轮胎压缩量。
Fs=Fl+Fα+Fh+Ff
(2)
机体质量的垂直运动

(3)

(4)
式中,F1为气动升力,ρ为空气密度,Cy为升力系数,Sy为升力计算面积;
刹车机轮的垂直运动

(5)
刹车机轮的转动
Jω=μNR-Mb
(6)
机体水平运动
在探讨德福的一致性方面,儒家将道德置于绝对优先的地位:一个人幸福与否,不能通过道德之外的事物来衡量,幸福必须具备相应的道德资格。因为儒家用道德和价值性的眼光审视全体,使全体成为价值性的全体,由此道德概念在全体层面获得了最大的普遍性,“依儒家的看法,道德秩序即是宇宙秩序,反过来说,宇宙秩序即是道德秩序,两者必然通而为一”①,因此儒家视野下的世界是道德世界,其所建立的世界观是道德世界观;据此,幸福被道德化,道德行为的完全实现即是最大的幸福。

(7)

(8)
式中,F2为气动阻力,Cx为阻力系数,Sx为阻力计算面积;
车架的转动
JCωC=2Nl1-2Ml2-2μN(R-δ)+Ff(l2+l3)sinα
(9)
式中Ff为辅助缓冲器内力。当施加刹车作用时,机轮会受到刹车力矩的作用,此时由于轮胎与地面的摩擦力突然增大,车架受到转动力矩的作用,车架开始俯仰振动。
3 仿真模型的建立
3.1 防滑刹车控制系统
防滑刹车控制律是起落架系统中最复杂的控制律,现代的飞机采用的控制方式普遍为偏压控制方式,可以用Matlab/Simulink建模实现。控制律框图如图3所示.

图3 防滑刹车控制律框图
计算两个速度之差,当其超过防滑工作门限时,产生防滑电流使伺服阀输出松刹压力以调小实际刹车压力来解除打滑。使用参考速度来代替飞机速度的原因是滑跑速度不易测量和难于实时传送。参考速度的产生器模型能够使其输出反应飞机速度的主要特征。在每次打滑解除后系统可以维持刹车压力于较低水平,并防止二次打滑,系统采用偏压调节,使电流按一定规律下降。
滑移率定义如下
(10)
结合系数与滑移率的关系可由下图所示的非线性函数表示[9]。在滑移率影响下,结合系数存在着一个最大值,与之对应的滑移率称为最佳滑移率,此时可以提供最大结合力,刹车控制律都是尽量将滑移率控制在最佳滑移率附近。
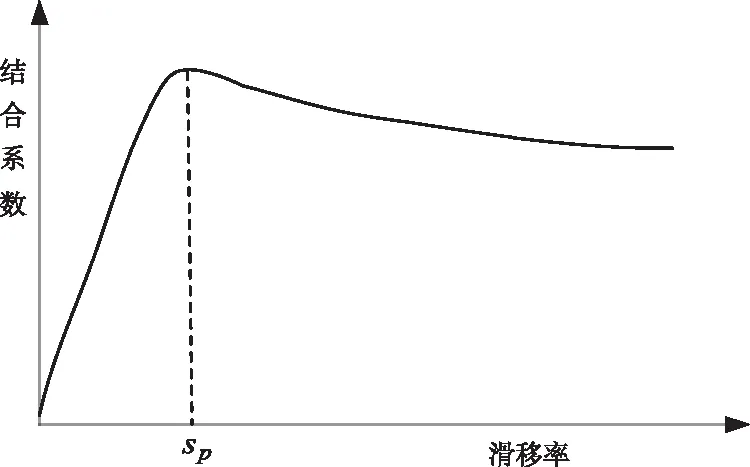
图4 结合系数与滑移率关系曲线
根据前面的分析和防滑刹车系统的逻辑控制关系,在MATLAB/Simulink中通过其模块化的操作建立各个子系统的模型,其中包括刹车控制律、刹车执行通道、与Motion接口等模块,将各个子系统连接,并设置好参数,就可以对飞机防滑刹车系统进行联合仿真。
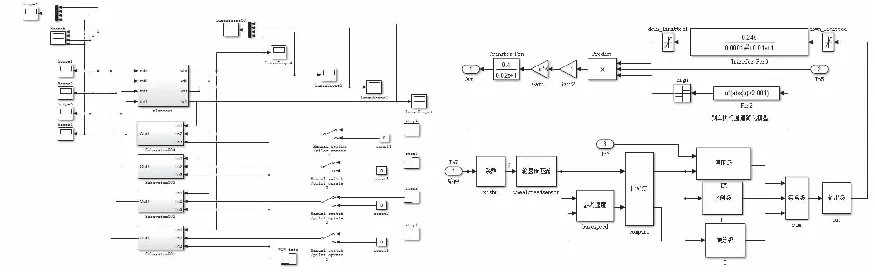
图5 防滑刹车控制系统
3.2 动力学模型建模
首先将三维模型的各个部件进行预处理,由于主要考虑的是车架的俯仰振动,除轮胎外将支柱、车架等部件视作刚性体,对各个连接点、转动、铰接点添加运动副,对轮胎、缓冲器、道面等进行处理,建立三维动力学模型。
3.2.1 轮胎模型
飞机通过物理轮胎与道面接触,物理轮胎在印记处接触地面,物理橡胶轮胎安装在金属轮毂上,轮胎产生法向力(弹簧力)、侧向力(转向)和操纵力(牵引力)。虚拟轮胎或轮胎模型产生由轮胎和道面间的相互作用生成的轮胎力。本文采用Motion模块中的高级轮胎模型,竖直力由垂直刚度计算得出,阻尼值为常数,侧向力由转弯刚度计算得出,纵向力为常数或可由可变摩擦力及滚动阻力得出。
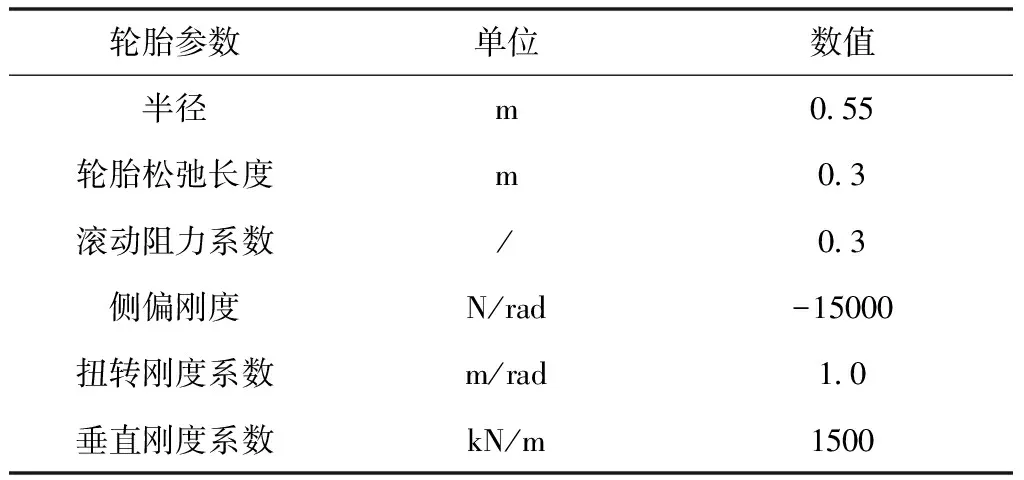
表1 轮胎典型参数
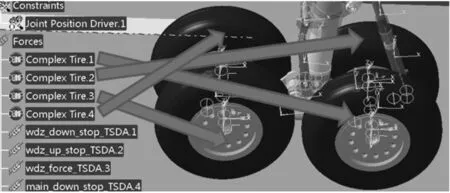
图6 高级轮胎模型
3.2.2 缓冲器模型
小车式起落架吸收能量部件主要由主缓冲器和辅助缓冲器组成,主缓冲器主要吸收落地时的冲击能量,辅助缓冲器在收放时可将车架折叠收起,在地面滑跑时还可提供阻尼,可吸收车架俯仰振动产生的能量。根据公式[4]

(11)
阻尼是非线性的,即F=c·u2,方向与速度方向相反。其中非线性阻尼系数与油液密度、油液缩流系数、压油面积和油孔面积有关,通常通过改变油孔面积来改变非线性阻尼系数。
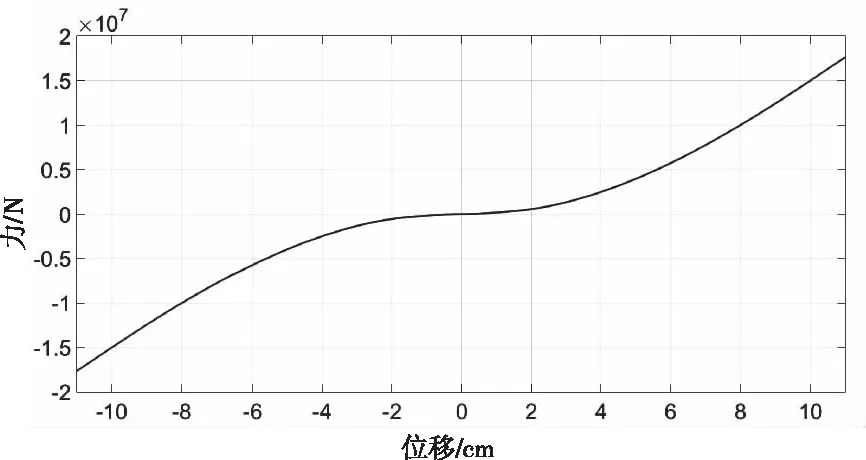
图7 力随行程变化曲线
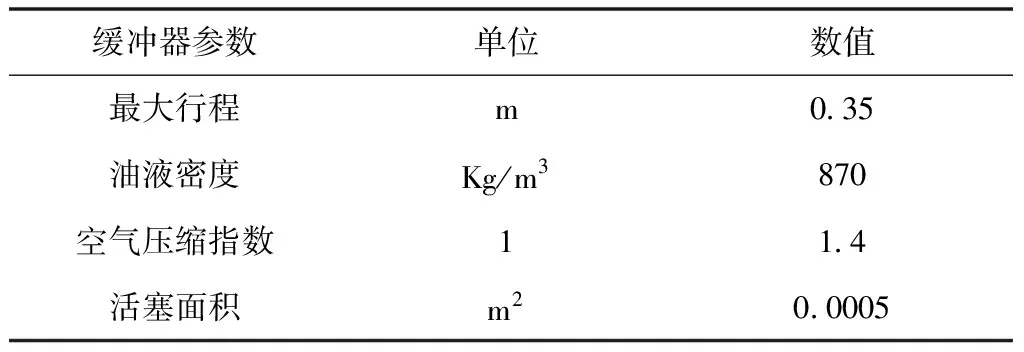
表2 缓冲器典型参数
3.3 联合仿真模型
LMS Virtual.Lab软件提供了与MATLAB的接口,Motion模块在计算结束后会生成plantout文件,将该文件添加到Simulink模型中,为模型提供所需的输入,计算结束后,计算结果会自动链接到LMS Virtual.Lab中。

图8 联合仿真示意图
4 仿真结果与分析
4.1 落震仿真
下图为车架转动角度随时间变化曲线。在起落架刚落地的前一段时间里,巨大的冲击能量靠支柱缓冲器吸收掉大部分的能量,随后支柱缓冲器趋于稳定。起落架在着陆短时间内,车架绕铰接点剧烈振动,频率12Hz,持续时间较短。在持续约0.5s后逐渐趋于平稳。不同速度下车架的振动频率一样,振动幅值随速度增加而增大。
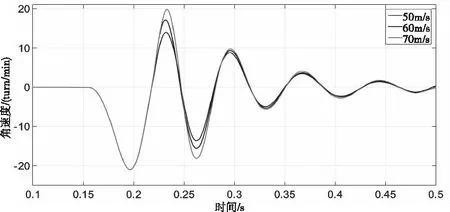
图9 不同速度车架转动角速度

图10 不同速度车架转动角加速度
4.2 抑制措施及结果
由于在落震时,车架俯仰振动主要依靠辅助缓冲器提供阻尼吸收能量,因此通过改变辅助缓冲器的一些参数,通过增加辅助缓冲器吸收的能量,减弱车架的俯仰振动。缓冲器的阻尼系数可以通过改变油孔面积来实现,在仿真时,通过改变缓冲器的力随位移变化曲线,实现增大阻尼的效果。结果表明,增大阻尼后,振动的频率变化很小,振动的幅值减低20%。通过增加辅助缓冲器的阻尼参数来减弱振动的方法是可行的。

图11 不同阻尼对应的车架角速度
4.3 刹车诱导振动分析
在1.5s时开始刹车,车架产生绕与支柱铰接点俯仰振动,整个俯仰振动持续约1.5s后逐渐趋于平稳。刹车系统持续输出刹车力矩,对于起落架系统是一个外部激励,是刹车系统引起车架振动的主要原因。通过不同速度下车架振动角速度结果,可以得出,幅值和频率变化很小,幅值基本相同。这是因为对于刹车诱导的振动,主要是由于刹车力矩的作用,速度对其影响相对较小。
图12 车架转动角速度

图13 车架转动角加速度
4.4 抑制措施及结果
对于刹车诱导车架的俯仰振动,由于刹车系统给车架提供的转动力矩,控制系统和结构的耦合作用引起车架的俯仰振动。通过改变辅助缓冲器参数增加吸收振动产生的能量,可以达到减弱振动的作用效果,振幅减弱10%。
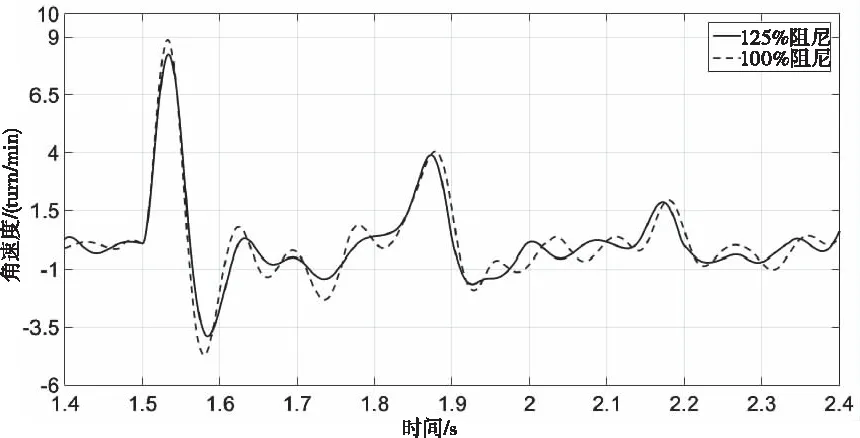
图14 不同阻尼值对应的车架角速度
优化刹车控制律,适当减小在刹车刚开始时的刹车力矩,这样虽然会损失一定的刹车效率,但是可以有效地减弱车架的俯仰振动。通过结果表明,优化后的控制律对于振动的减弱有明显的作用。由于减小了起始刹车力矩,使得车架在刚开始振动时幅值明显减小,幅值减小了10%,对整个振动过程也有一定减弱作用。通过改变控制律,实现对刹车力矩的控制,减弱车架的俯仰振动的方法是可行的。

图15 刹车力矩随时间变化曲线

图16 控制律优化前后角速度响应
5 结论
通过计算落震和刹车两种工况,分析了不同情况下振动产生的机理,振动过程。对于落震工况,由于飞机在触地瞬间,产生巨大的冲击能量,整个车架开始剧烈的俯仰振动,但持续时间较短。刹车系统为每个机轮提供刹车力矩,由于刹车系统与起落架的耦合作用,会引起车架的俯仰振动。通过改变缓冲器参数和控制律参数对振动进行抑制,取得一定的效果。起落架车架振动会导致部件磨损,影响刹车效率等一系列问题,对其研究对于起落架工程设计具有重要工程意义。
本文以相关力学及控制理论为基础,运用LMS软件的Motion模块和Simulink对某飞机起落架进行了动力学仿真,优点在于Motion与CAD模型的无缝连接,能够导入真实的实体模型,进行快速计算仿真分析。通过分析,验证其分析方法和模型的可行性,其结果能够为改进产品设计、提高产品性能提供分析设计手段。