基于改进PF的锂电池RUL预测比较研究
2022-09-28冀超骥袁学庆
冀超骥,袁学庆,张 阳
(1. 中国科学院沈阳自动化研究所,辽宁 沈阳 110016;2. 中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110169;3. 中国科学院大学,北京 100049)
1 引言
锂离子电池相比铅酸和镍氢等电池具有高能量密度、低记忆效应且环境友好等优势,从手机、笔记本电脑等便携式消费电子设备到混合动力汽车、航空航天领域,目前其都是理想能源。然而,使用中的电池受内外部环境负载的影响其性能会逐渐退化,具体表现为容量衰退及内阻增加,随之其寿命逐渐衰减直至最终失效。锂离子电池作为动力来源,是设备正常运转和系统功能实现的关键,其出现失效的后果可能从带来不便到灾难性故障和大型任务的失败,随着锂电池应用的增加,其在使用中的故障预测和健康管理(prognostic and health management,PHM)受到了更多研究人员的关注。电池健康管理的三个关键内容是荷电状态(state of charge,SOC)估计、健康状态(state of health,SOH)估计和剩余寿命(remaining useful life,RUL)预测。RUL可以定义为电池从当前工作状态至其寿命达到终止前所能经历的充放电循环次数。通过有效预测RUL,可使电池在失效之前提前更换,实现自主预防性维护,提高系统可靠性。
近年来,针对锂离子电池RUL预测的研究主要围绕基于性能的方法展开,通过估计电池性能,如当前电池实际容量的衰退情况,判断电池充满电后的容量能否满足可保证电池正常工作的阈值要求,将对RUL的预测转化为对容量的预测,获得RUL预测结果。基于性能的锂电池RUL预测方法可分为模型法、数据驱动法及融合型方法。基于模型的RUL预测所用模型又分为退化机理模型、等效电路模型和经验退化模型。其中,经验退化模型无需考虑电池内部的物理化学特性,转而从数据角度出发,通过描述电池内部能够代表电池性能退化的状态量随时间变化的规律或描述前后两个时刻状态量之间的关系,实现电池退化特征的模型表达。基于经验退化模型实现电池RUL预测,一般是利用滤波算法对电池退化信息进行跟踪,针对特定状态采集数据,求出模型的最优化参数完成模型构建,再基于模型进行状态滤波。因此,基于经验退化模型的预测又被称为基于统计滤波的预测。广泛使用的统计滤波算法主要有卡尔曼滤波、粒子滤波及与其相关的优化算法。
基于经验退化模型,利用粒子滤波(particle filter,PF)算法进行锂电池RUL预测的统计滤波方法,由于能够适应非线性、非高斯的状态预测并可提供预测结果的不确定性表达,在实际中应用广泛。但是,PF本身存在不可避免的粒子退化问题,即算法经过数次迭代后,许多粒子的权重变得很小,只有少数粒子的权重较大,使大量计算浪费在对后验概率估计几乎不起作用的粒子上导算法性能下降。采样重要性重采样粒子滤波(sampling importance resampling PF,SIR-PF)引入的重采样过程虽然可以减小粒子退化影响,但又会导致粒子多样性降低,即最后所有粒子可能都由同一个大权值的粒子复制而来,影响预测精度。除增加粒子数和重采样之外,减小粒子退化影响的重要途径是选择合适的重要性概率密度函数使粒子间的方差更小。因此,本文将通过两个途径对基于PF算法进行锂电池RUL预测的方法做出改进:①选择合适的建议分布进行重要性采样;②免重采样。
2 锂离子电池容量双指数经验退化模型
2.1 锂离子电池容量退化现象
与其它二次电池一样,锂离子电池的实际容量会随充放电循环次数的增加而衰减,且不可避免,RUL随之减少,造成这种现象的主要原因有过充、自放电、电解质还原、金属锂沉积、活性物质溶解等。
本研究使用NASA公开的锂电池数据集,该数据集在环境温度25℃下由18650电池获取,电池失效阈值取1.38Ah。对所需数据进行提取后,在matlab中绘制编号B0005、B0006、B0007和B0018四组电池的容量退化曲线如图1。

图1 电池容量退化曲线
2.2 锂离子电池容量退化模型的构建
通过统计滤波方法预测锂电池RUL,需要确定滤波过程所基于的电池容量退化模型。目前广泛使用的电池容量双指数经验退化模型对于电池容量的非线性退化特征跟踪效果较好,其形式如下
=·exp(·)+·exp(·)
(1)
其中,代表周期数,电池的一次充放电是一个循环周期;是第周期的电池容量;,,,是需要进行参数拟合的未知参数。
为验证模型可行性,首先借助matlab曲线拟合工具箱进行模型参数拟合。由于编号B0007的电池在实验周期结束时容量仍未达到失效阈值,这里取B0005、B0006和B0018三组电池的参数拟合结果见表1。
文献[2]采用常用评价指标:和方差(SSE)、确定系数(R)、调整确定系数(Adjusted R)和均方差(RMSE)评价模型拟合结果的优劣,表明了双指数经验退化模型能够有效描述锂电池容量的退化趋势。
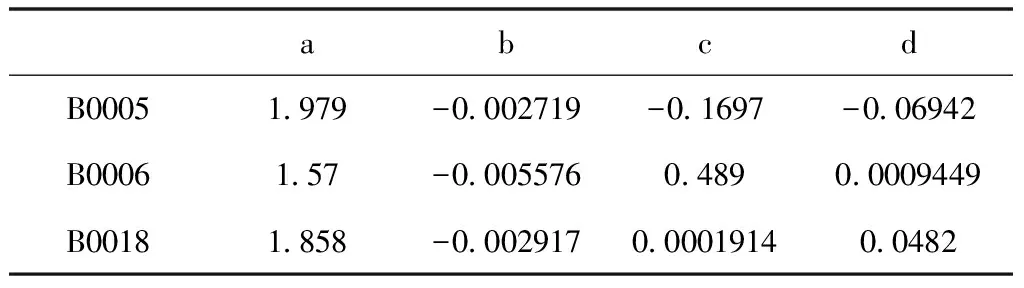
表1 模型参数拟合结果
从曲线拟合工具箱得到的a,b,c,d参数值经过一定处理后可作为初始模型参数,完成对电池容量退化模型的构建。本研究将以B0005电池数据作为实验对象,为减少特殊参数的影响,这里使用平均值法,即取三组电池拟合结果的平均值作为B0005电池容量退化模型的初始参数,,,,计算结果如下:
=18023;=-00037;=01065;=-00068。
3 粒子滤波及其相关改进算法
PF在实际应用中存在“粒子退化”问题,减小粒子退化影响的主要措施有增加粒子数、重采样和选择合适的重要性采样概率密度函数(又称建议分布)。
增加粒子数的方法最为简单直接,但粒子数的增加也意味着计算量和时间消耗的增加。重采样的思想是将权值较小的粒子剔除,对权值较大的粒子依据其权值大小按比例复制,即权值大的多复制,从而构成新的粒子集,各粒子的权值均为1/N。文献[12]中介绍并比较了四种重采样方法。选择合适的重要性概率密度函数是克服粒子退化的又一重要途径。
3.1 SIR粒子滤波
SIR-PF在PF的权值归一化步骤后加入了重采样的操作,并对建议分布做出特定的选择,即

(2)
SIR-PF选取(2)式丢失了当前时刻的测量值,使当前状态值严重依赖于模型,如果模型不准确或测量噪声突变,则这种选取将不能有效表示后验概率的真实分布。解决办法可以是使用利用无迹卡尔曼滤波(unscented kalman filter,UKF)将最近的测量信息计入建议分布的无迹粒子滤波(unscented particle filter,UPF)。同时,选择好的重要性概率密度函数也可减少粒子退化现象,选择标准是使采样粒子之间的权值方差更小。
3.2 无迹粒子滤波(UPF)
已知一个动态系统有如下形式的状态方程和观测方程
=(-1,-1)
=(,)
,是独立同分布的过程噪声和测量噪声,~(0,),~(0,)。
的具体步骤如下:
321 初始化





322 对每个周期=1:
1) 重要性采样
对每个粒子=1:,通过获得更新值:
①计算sigma点集
取2+1个点为

②时间更新






③测量更新





④用UKF运行结果得到的均值和协方差进行重要性采样

2) 计算个粒子的权值

3) 归一化个粒子的权值
4) 重采样
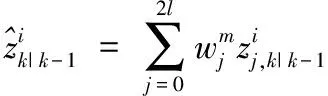
5) 计算状态估计值并输出
这里的步骤是按照后续实验实际使用的步骤给出的,即对粒子权值归一化后,先重采样使权值变为1再求状态量的平均值。
3.3 高斯粒子滤波(GPF)
重采样能够克服粒子退化现象,但是重采样也会带来新的问题,最后所有粒子可能都是同一个大权值粒子的子代,粒子总体的多样性降低,不足以用来近似表征后验概率密度,即出现“样本贫化”。现有的各种改进粒子滤波算法仍未能很好地解决重采样过程中计算量较大、出现样本枯竭而导致滤波发散的问题。
为了保证粒子多样性,研究人员又提出了重采样-MCMC算法、权值选择粒子滤波等改进了重采样步骤的方法预测锂电池RUL。本研究则选择从“免重采样”的思路入手,提出将改进的高斯粒子滤波(improved gaussion particle filter,GPF)应用于锂电池RUL预测。
高斯粒子滤波(gaussion particle filter,GPF)是用高斯分布去近似后验分布,本质上是利用重要性采样去近似未知状态变量的后验均值和协方差。与一般的粒子滤波相比,只要所用的高斯分布是正确的,就不会产生粒子退化问题,因此无需重采样,从而降低了算法在原理和实现过程上的复杂度。
GPF算法步骤如下:

1) 量测更新
①重要性采样

②计算粒子权值

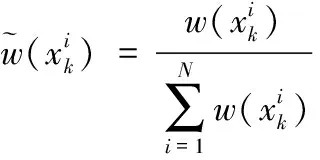
③粒子权值归一化

④估计状态后验概率密度(|0:)的均值和协方差


2) 时间更新
①从量测更新阶段估计的后验分布采样

②计算预测粒子集:

③计算预测粒子集的均值和协方差



3.4 改进的高斯粒子滤波(IGPF)

4 实验
实验将以0005电池数据为基础,将对锂电池RUL的预测转换为对电池在某个循环周期实际容量的预测。以(1)式的参数[a,b,c,d]作为系统状态量,选取不同的起始预测周期,在该周期前分别利用SIR-PF、UPF和IGPF进行模型参数更新,在该周期后参数不变,用这些参数建立电池容量退化模型,预测后续周期的电池容量,得到电池容量退化至失效阈值容量时对应的周期,进而得出锂电池RUL。具体步骤如下:
4.1 模型参数更新
1) 将12节中计算的,,,作为初始模型参数,即=[,,,]。
2) 建立锂电池系统状态方程和测量方程如下
=[,,,]


在实验中取



4) 以起始预测周期=81、为例,某次实验对模型参数的更新情况如图2,具体参数更新结果为
=18023,=-00022,=01076,=-00071
后续周期将使用这组参数进行容量预测。

图2 IGPF更新的模型参数
4.2 锂电池容量和RUL预测
1) 在起始预测周期=81之后的周期,模型参数不再变化,将=81时的参数代入容量退化模型计算当前周期的电池容量预测值。起始预测周期后第个周期的容量计算表示为:
+=·exp[·(+)]+·exp[·(+)]
在程序中可以通过循环逐一计算后续各周期所对应的电池容量。
2) 找出失效周期。本实验中是选取电池容量未低于失效阈值1.38Ah的最后一个周期作为电池寿命截止周期,用PEL(Prediction of End of Life)代表该周期的预测值,REL(Real End of Life)代表已知数据集中实测容量值对应的失效周期,求解PEL可用下式表示
138>·exp[·(+1)]+
·exp[·(+1)]
使用SIR-PF、UPF和IGPF的电池容量跟踪和预测曲线如图3。
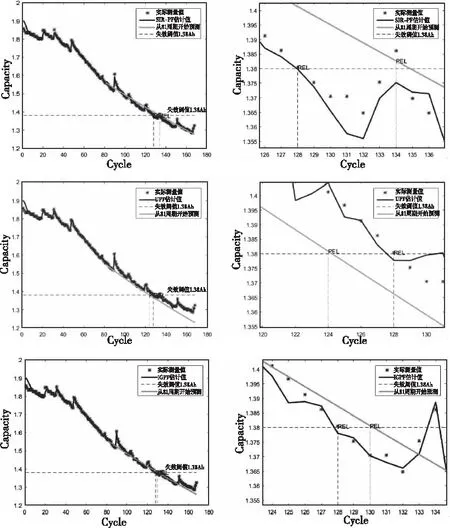
图3 锂电池容量跟踪与预测曲线
3) 计算锂电池RUL、预测误差error(cycle)
=-(+)
()=-
4) 取不同的起始预测周期k=71、k=81和k=101,分别使用SIR-PF、UPF和IGPF进行10次失效周期的预测,计算预测误差的均值和方差进行比较分析。具体数据见表2。μ和∑分别代表预测结果误差的均值和方差。表中的/两侧分别代表取误差绝对值求和与直接将误差求和的结果。
5) 计算SIR-PF、UPF和IGPF预测结果的不确定性表达,绘图并进行比较分析。本研究在实验中发现预测阶段直接代入起始预测周期的状态量滤波结果,即用一个确定的向量=[,,,]去计算容量,实现简单,且尤其对于新提出的IGPF算法得到的预测结果分布更稳定、精度更高。这里为给出粒子集预测结果的后验概率分布,也使用起始预测周期的粒子集计算容量和RUL。

表2 N=100时不同起始周期各算法误差
计算起始预测周期k后第m周期的预测容量:


计算预测容量的均值
计算起始预测周期粒子集对应的失效周期


计算失效周期的均值

计算剩余寿命的均值

计算剩余寿命的后验概率密度函数

以粒子数N=100,起始预测周期k=101,预测失效周期结果为129为例,使用SIR-PF、UPF预测RUL的概率密度和IGPF预测RUL的概率密度及不同RUL预测结果对应的原始粒子数分布如图4所示。

图4 RUL的概率密度及IGPF的原始粒子分布
说明:从RUL预测结果的概率密度图可知UPF比SIR-PF的粒子退化程度小,具体表现为pdf的宽度窄、峰值高,说明权重偏小的无效粒子更少。而IGPF的图像较为特殊,每次实验均有约1/3数量的粒子计算所得到的容量值在实验结束周期(第168周期)仍未达到失效阈值,经实验发现如将它们的失效周期定为168加权计算的预测结果精度已足够高,其它粒子预测值分布均匀,由于免重采样所以无粒子贫化现象,且最终结果可以有效预测RUL。
5 结论
研究通过理论分析和实验验证,表明UPF和IGPF均能够有效预测锂电池RUL,预测结果误差的方差均比SIR-PF小。其中,UPF预测误差的均值最小,IGPF运行速度则更快,且误差全在大于0的一侧,预测结果更加稳定。
总结如下:
1) UPF:使重要性采样的粒子方差变小,可以抑制粒子退化现象。
2) IGPF:免重采样避免了粒子贫化现象,具有运行速度快、精度高且易实现的优势。