低频液体表面波衍射光斑分布研究
2022-09-27王江宏
王江宏
(陕西国防工业职业技术学院, 陕西西安 710300)
在激光应用领域里, 光的衍射原理在光学测量方面得到了广泛应用。最早发现衍射现象的是意大利物理学家格里马地[1], 其在1665年出版的书中记载了观察到光线通过棍棒后的强弱分布, 发现光的分布没有截然的边界, 不能用当时通行的光的微粒说来解释。1979年, Weisbuch等[2]首次提出了用液体表面波实现光学衍射光栅, 并以此建立了液体表面波的光学测量方法。人们认为, 平面波形成的衍射条纹在分布中与其正负级数是一一对应的。那么是否所有的衍射条纹都是对应分布的, 衍射条纹的相对光强又遵循哪些规律。由传统理论结合声光理论得知, 液体表面波波长远远大于激光波长时, 仍可观察到清晰并且稳定的衍射图样[3-5]。
目前国内研究中张晓琳[6-7]等用激光干涉方法证明水下声信号的可行性。苗润才团队运用了激光衍射方法探测水下声信号, 并在以往的研究中, 对液体表面振幅与激发深度[8-10]、衰减[11-12]、衍射光斑不对称性[13-14]等物理关系进行了研究。那么声源在不同深度位置时, 液体表面波是如何分布的。基于以上研究基础, 本文对实验系统装置进行改进, 采用丝杆直线模组来控制声源入水深度。承托水下声源部分采用Z字形拖杆, 并与定位器连接, 用来调节声源入水深度, 定位器调节精度可以达到毫米级。此部分改进装置提高了测量精度, 在实际应用中具有很强的实践指导意义。
本文主要研究当水下声源处于不同深度位置时, 液体表面波的光衍射现象, 以期从获取的衍射图样中判断其分布特性。
1 水下声信号探测系统实验装置
1.1 实验系统
实验装置图如图1所示, 分别为有机玻璃样品池和液体样品, 低频信号发生器和表面声波激发源, 473 nm蓝光激光光源, 水下声源定位器, 衍射图样的采集和数据处理系统。

图1 水下声信号探测系统实验装置及原理图Fig.1 Equipment and schematic diagram of underwater acoustic signal detection system
1.2 衍射光强原理
对斜射到表面波的激光束进行调制, 实现声光衍射。入射光波在有表面声波存在的介质表面发生反射后在光屏上可以观察到清晰的衍射图样, 激光光斑长轴长度远小于入射点到光屏的长度, 所以该衍射近似为夫琅禾费衍射。假设该波纹形状恒定, 为线性波, 则表面波可表示为

其中A为表面波的振幅,k为表面波波矢量,k=2π/Λ。
由傅里叶光学知识可知, 经表面波调制后的光场分布[15]为
式(3)中,ω为表面波角频率,z为激光光斑的宽度,x′为衍射光斑位于光屏的坐标,L为光屏到激光入射点的距离,Jn为第一类贝塞尔函数, 其中n为整数, rec(tx/L)为矩阵函数, sinc(x)为特殊函数,Jn2表示为第n级衍射条纹的相对强度, sinc2函数表示第n级衍射条纹形状及位置。
通过上面的分析可知, 表面波波长决定衍射的空间分布。
假设以激光作为入射光源, 从空中以一定角度入射到水面, 由光的波动原理和表面声光效应可知, 其照射到水面后, 在水表面发生声光衍射现象。为便于讨论, 假设接收屏上某一点P, 若P点对应的衍射角为θ, 则相邻两狭缝间的光程差为δ, 结合光栅方程, 得出第q级衍射光斑的衍射角为
讨论

从上述讨论中可以看出, 除0级外, 其余衍射级的正负级衍射条纹的衍射角大小不相等, 那么在接收屏上呈现的衍射光斑分布就不对称。
2 实验结果与分析
实验选择473 nm蓝光激光器作为激光光源, 声源频率设定为120 Hz, 接收屏与激光入射点的距离为5.5 m, 水池深度尺寸为0.4 m。激光束以1.47 rad入射角斜射到液体表面上, 通过调整角度, 使得激光束通过波形转换器后照射在液体表面, 在观察屏上可以看到清晰的衍射图样。实验过程中, 通过调节丝杆直线模块的定位器旋钮, 使得水下声源与水面的距离发生变化, 得到相应的水下深度位置的衍射图样。当水下声源深度离水面6.5 cm时, 用CCD拍摄衍射图样, 每次增加1.0 cm声源深度, 直到声源深度至10.5 cm位置。图2是声源在不同深度位置采集的液体表面波衍射图样。可见衍射图样中心光斑强度及大小相对稳定, 随着声源入水深度的增加, 衍射光斑正负高衍射级光斑强度逐渐减小, 高衍射级光斑逐渐消失。

图2 声源不同入水深度的相对光强衍射图样Fig.2 Relative light intensity diffraction pattern of sound source at different water depth
从图2可以看出, 衍射光斑对比度很高, 同时也观察到衍射光斑的级数及亮度的变化。在声源入水深度为6.5 cm处时, 可以看到±3级光斑, 逐渐增加声源入水深度, 在入水深度达到7.5 cm时, ±3级光斑消失, ±2级光斑亮度相对较亮, 继续增加声源入水深度到10.5 cm时, ±2级光斑亮度相对减弱。
使用Matlab软件编辑程序, 并对衍射光斑图样进行处理分析, 得到水下声源深度与相对光强的三维关系图。相对光强曲线如图3所示。
(1)通过三维衍射光斑图对比可知, 在声源深度变化过程中, 光斑强度随着声源入水深度位置的增加而减小, 光斑衍射级数也随之产生变化。从图3中可直观地看出, 声源入水深度不断增加, 光斑的亮条纹数在不断减少, 并且呈不对称减少。
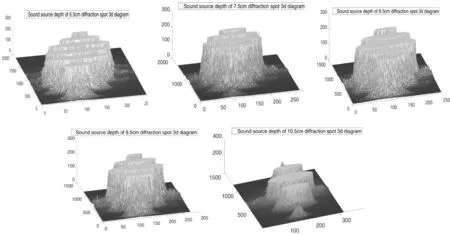
图3 衍射光斑扫描图Fig.3 Diffraction pattern
(2)对声源在不同深度位置时衍射光斑的每一级光斑大小进行分析可知, 0级光斑和±1级光斑的直径变化趋势基本稳定, 但是随着声源位置深度的不断增加, ±2级光斑的大小逐渐减小, 如图4所示。

图4 衍射光斑大小分析图Fig.4 Diffraction spot size analysis diagram
(3)由光斑直径随着声源深度的变化关系可知, 声源深度不断增加, ±2级光斑直径逐渐变小, 衍射光斑尺寸像素减小, 并且两者之间呈非线性关系。对采集的衍射图样用Matlab软件进行分析, 通过对光斑位置的分析, 得到各级衍射光斑的间距值。当水下声源处于6.5 cm位置时, 得出±1级衍射光斑与0级衍射光斑的相对间距为X+10=25pixle,X-10=24pixle, 同理,X+20≠X-20, 同级光斑的正负衍射级间距差基本在毫米量级, 肉眼观察不出它的分布不对称性。当水下声源深度逐渐增加, 可以看出X+10≠X-10, 同理,X+20≠X-20。这表明各级衍射光斑相对于0级衍射光斑呈现出的不对称性具有普遍性, 如图5所示。
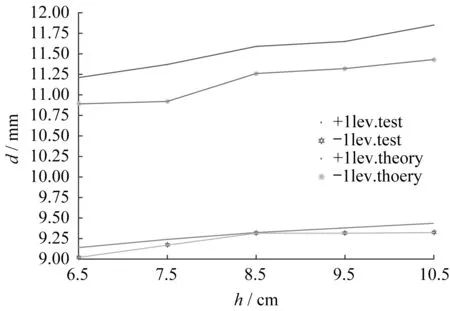
图5 不同声源深度的光斑间距Fig.5 Spot spacing at different source depths
3 结 论
根据声光衍射效应, 水下低频声信号探测装置采用丝杆直线模组来控制移动, 可精确控制声源入水深度。通过调节直线模组, 改变水下声源与水面的深度, 在接收屏上得到高清衍射光斑。实验室环境中, 在低频液体表面波和入射激光光波波长不比拟的条件下, 观察到了衍射现象, 并获得了清晰的衍射图样。
当激光斜射到受声源激励的液体表面波时, 通过改变声源入水的深度位置, 用CCD采集获得一系列不同深度的衍射光斑图。且衍射光强度随着声源深度增加逐渐减弱。通过对衍射光斑大小的分析, 发现衍射光斑大小随着声源深度的增加逐渐减小。
分析衍射图样位置, 得知衍射光斑在不同水下声源深度位置, 分布具有不对称性。通过仿真和实验数据对比可知, 随着水下声源深度的增加, 衍射光斑的级次在减少, 并且级次也表现出不对称性。
