近地轨道航天器编队仅测距相对导航方法
2022-09-23龚柏春张伟夫
龚柏春,王 沙,张伟夫,周 亮,李 爽
(1. 南京航空航天大学航天学院,南京 210016;2. 上海卫星工程研究所,上海 201109;3. 航天科工空间工程发展有限公司,北京 100039)
0 引 言
编队航天器因为具有相较于单个航天器的许多优势,成为学术界的研究热点。例如,在太空任务中,单个航天器发生故障将直接导致任务失败,而编队航天器的冗余度设计可以在编队某个成员发生故障时由备用航天器代替完成任务。除此之外,编队航天器可以携带不同的载荷,完成单个航天器无法完成的多角度成像、通信中继等任务。编队航天器的飞行任务比较复杂,需要在协同飞行的过程中控制编队成员之间的相对距离和方位,使整个编队保持确定的几何形态,而完成编队队形控制的前提是编队成员之间的精确相对导航。而要实现相对导航,集群成员之间首先需要进行相对测量,其次需要建立可靠通信连接实现信息的实时交换。受航天器载荷体积和功耗的限制,光学相机仅测角和无线电仅测距成为航天器自主相对导航的主要发展方向。
杜荣华等在仅有目标视线角测量的条件下,提出了一种空间非合作目标交会接近的自主检测和跟踪算法。周文雅等研究了一种改进的基于图像特征点的快速定位和简易旋转算法,能够提高双目视觉无人机之间的相对定位精度。金泽明等联合扩展卡尔曼滤波算法和扩展卡尔曼粒子滤波算法提高了空间非合作目标单目视觉位姿估计的精度和计算效率。然而无源相机仅测角相对导航受光照条件制约,且相机有视场角限制,在测量过程中需要不断调整来跟踪目标的方位,因此常用于非合作航天器的相对导航。
合作航天器利用数据链测距实现相对导航时,不需要考虑光学测量或无线电测量时的传感器指向问题,相对导航设备质量轻、功耗低。Burchett等研究了飞行器在三维空间的仅测距相对导航算法,得出系统是局部弱可观的结论。Wang等和Christian分析了Clohessy-Wiltshire(CW)动力学模型下的仅测距模糊轨道,得到仅测距相对导航存在三种镜像模糊轨道和四种变形模糊轨道的结论。Wang等也分析了TH动力学模型下的仅测距模糊轨道,指出仅测距相对导航理论上存在三种镜像模糊轨道,仿真中存在额外的四种变形模糊轨道。Gong等研究了近程圆或近圆轨道航天器编队利用传感器偏于质心安装提供的杆臂效应来避免仅测距收敛于模糊轨道的方法,但是Wang团队和Gong等所采用的CW和TH方程均没有考虑航天器在轨的各种摄动因素。Shalaby等研究了利用在同一个飞行器安装多个用于测距的通信信标,提升了仅测距相对导航系统的可观测度。但是安装在同一架飞行器上的信标基线受飞行器实际尺寸的限制,因此该方案更适合于近距离或航天器交会对接场景下的相对导航。Xiong等通过在编队中引入一架无人机作为参考信标,文献[12-15]利用多个固定点作为参考信标,研究了超宽带测距相对定位方法。Martel等利用超宽带至少六次的距离测量信息和V-SLAM测量的各飞行器从各原点出发的位移信息,提出了一种独特的四自由度相对位姿定位方案。
本文针对近地轨道航天器编队存在的自主相对导航需求,研究利用低成本数据链测距实现航天器相对导航的方法。论文推导了在地球非球形引力摄动下的航天器高精度相对运动模型,分析了基于该动力学模型设计的仅测距相对导航系统的可观测性。此外,论文设计了以四个航天器为例的编队分布式估计策略并研究了相对导航的误差传播规律,为大型航天器编队的相对导航算法设计奠定了基础。
1 坐标系定义
本节定义描述航天器绝对运动的地心赤道惯性坐标系和相对运动的航天器轨道坐标系,第2节将在此基础上推导航天器在J2摄动下的相对运动方程。
地心赤道惯性坐标系:原点位于地心,轴指向春分点,轴垂直于赤道平面并且与地球自转角速度方向一致,轴位于赤道平面内与轴、轴构成右手直角坐标系。
航天器轨道坐标系:原点位于航天器质心,轴沿径向方向由地心指向航天器质心,轴垂直于轨道平面指向轨道角速度方向,位于轨道平面内与轴、轴组成右手正交坐标系。
2 相对运动动力学模型
相对运动模型的精度直接影响着航天器相对导航的精度,已有的航天器相对导航研究所使用的动力学模型都是基于无摄动二体动力学推导的CW方程或者TH方程,具有一定的局限性。对于近地轨道航天器,特别是中低轨道航天器,地球非球形引力摄动是主要摄动源之一,而J2摄动又是地球非球形引力摄动中的最主要部分。因此为了实现近地轨道航天器的高精度相对导航,本文首先要建立航天器在J2摄动下的相对运动模型。
2.1 J2摄动相对运动模型
记航天器在系下的位置为=[,,],则J2摄动下航天器的动力学方程如下
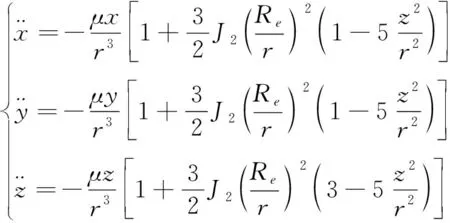
(1)



(2)


(3)



(4)


(5)




(6)



(7)



(8)


(9)


(10)

(11)

(12)

(13)
2.2 相对运动模型精度分析
理论上,对于近地轨道航天器,J2摄动相对运动模型因为考虑了地球非球形引力摄动源中最主要的J2摄动项,因此比CW和TH相对运动模型具有更高的精度。为了对比三种相对运动模型的精度,进行如下仿真,仿真中航天器绝对运动学只考虑地心引力和J2摄动项。根据第1节航天器轨道坐标系的定义,可以利用航天器在系下的位置换算得到系下的相对位置,并以此作为三种不同动力学模型计算结果的参考,追踪器和目标器轨道六根数设置分别如表1中航天器1和航天器2所示。表1中,,,,,,分别代表轨道的半长轴、偏心率、升交点赤经、轨道倾角、近地点辐角和真近点角。航天器1和2相对距离为10 km到12 km,仿真步长为10 s,总仿真时长为2个轨道周期,约3.4 h。
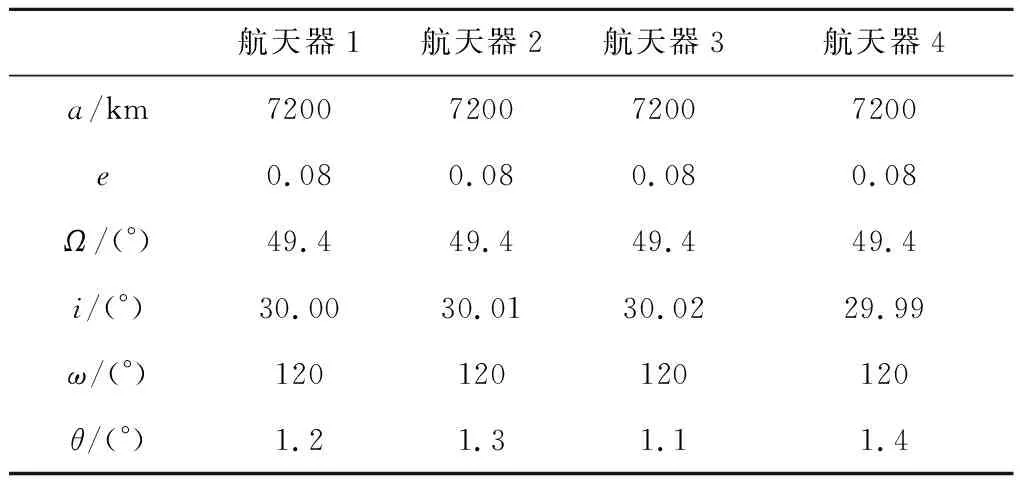
表1 航天器编队轨道六根数设置Table 1 Classical orbital elements setting for spacecraft formation
仿真结果中,随着时间的推移,根据相对运动模型递推的状态误差逐渐增加,这是因为这三种相对运动模型本质上都是只保留了泰勒展开后一阶项的线性相对运动模型。其中,CW相对运动模型状态递推误差在0.5和1.5个轨道周期时达到最大值0.23%,TH相对运动模型状态递推误差在2个轨道周期时达到最大值0.16%。J2摄动相对运动模型精度最高,状态递推误差在2个轨道周期时达到最大值0.06%。
3 数据链测距模型
合作航天器有两种模式可以实现数据链测相对距离,其中一种是飞行时间差(Time difference of arrival, TDOA)测距模式。记Δ是航天器2信号接收时间与航天器1信号发送时间之差,由此计算航天器之间距离
=Δ
(14)
式中:代表光速。TDOA测距是最简单的测距方法,航天器之间的通信可以是单向的,但是它要求航天器时钟必须是同步的。另一种是飞行时间(Time-of-flight, TOF)测距模式,Δ是航天器2接收信号时间与航天器1发送信号时间之差,Δ是航天器1接收信号时间与航天器2发送信号时间之差,航天器相对距离为

(15)
利用TOF测距时,航天器之间通信是双向的,可以避免航天器钟差带来的测距误差,因此本文将采用TOF测距模式。若时间测量误差满足高斯白噪声分布,由于和Δ具有线性关系,则数据链测距可以建模为

(16)

4 可观测性分析
可观测性分析是指在不考虑系统噪声和观测噪声的条件下,根据历史测量信息能否唯一确定系统状态初值,它决定了滤波算法能否有效地估计出系统的状态。本节将根据第2节建立的动力学模型和第3节建立的观测模型,分析相对导航系统可能存在的模糊轨道。因为J2摄动相对运动模型比较复杂,非线性系统可观测性分析的李导数方法不再适用,所以本节将结合理论和数值仿真的方法分析系统的可观测性。
4.1 仅测距模糊轨道
仅测距相对导航因为缺少相对方位信息,系统可观测性不足,往往存在模糊轨道。模糊轨道与真实轨道满足相同动力学模型并且具有相同测距输出,它与真实轨道的区别在于系统状态的初值不同。Wang等的研究结果表明,仅测距相对导航可能存在的模糊轨道一共7种,见表2。其中,(a)、(b)和(c)类模糊轨道因为和真实轨道形状大小相同,被称为镜像模糊轨道;(d)、(e)、(f)和(g)类模糊轨道和真实轨道形状和大小不同,被称为变形模糊轨道。
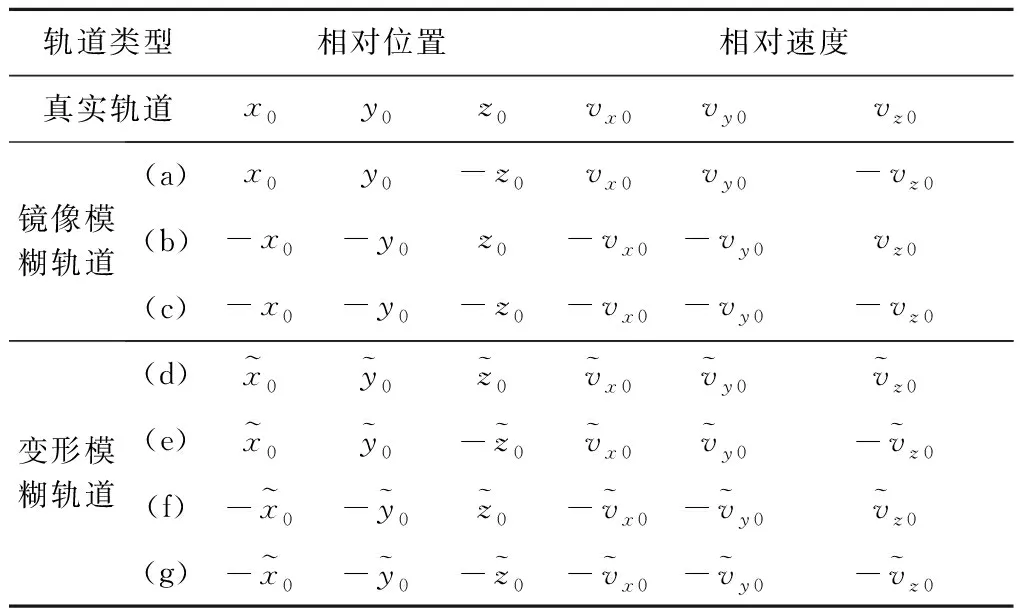
表2 仅测距模糊轨道初始状态Table 2 Initial state of range-only ambiguous relative orbits
4.2 可观测性理论分析
对于如下标准线性时变系统
(17)
根据式(17)设计的仅测距相对导航系统,记模糊轨道初始状态为′=-。可以证明,在动力学模型的约束下,该模糊轨道在任意时刻的状态量′()满足
′()=-()
(18)
它与真实轨道状态()是相反数关系,因此与真实轨道具有同样测距输出,是如表2所示的(c)类镜像模糊轨道。CW方程、TH方程和本文所建立的J2摄动相对运动方程都可以表示为式(17),因此基于这三种相对运动模型的仅测距相对导航系统都存在该类镜像模糊轨道。但是对于式(17)所示的线性时变系统,因为控制量的输入,初始状态为′=-的模糊轨道将不一定满足式(18),因此可能避免模糊轨道。这种思想与Woffinden等通过轨道机动来解决仅测角相对导航的不可观测问题很相似。

(19)
4.3 可观测性数值分析
Wang等在论文中通过数值仿真发现,保留CW方程或者TH方程推导过程中泰勒展开的二阶项、三阶项,可以提高仅测距相对导航系统的可观测性,避免滤波收敛于模糊轨道。下面通过数值仿真分析式(9)中的J2摄动项,是否同样有抑制滤波发散的作用。对于表1中的航天器1和2,使用无味卡尔曼滤波(Unscented Kalman filter, UKF)进行相对运动状态的估计,仿真中假设追踪器在系下的位置和速度精确已知。滤波关键参数设置见表3,总仿真时长为10000 s,约2个轨道周期。

表3 滤波算法参数设置Table 3 Simulation parameters setting for Kalman filter
定义仅测距相对导航收敛域为能使滤波收敛于真实轨道的初始估计误差集合,收敛域越大,表示系统的可观测性越好。但是在比较考虑J2摄动和不考虑J2摄动(采用TH模型)系统的收敛域时,因为不能穷举所有的初始估计误差,因此选取如表4 所示的8个方向进行比较。

表4 初始估计误差的八个方向Table 4 Initial error setting for the eight directions


(20)
图1是两种相对运动模型的距离估计误差图,由图1(a)可知,仅测距相对导航不同方向的收敛性是不一样的。通过对比图1(a)和图1(b)可知,J2摄动模型和TH模型在选定的8个方向上具有相同的收敛性。另外,J2摄动模型具有更高的相对导航精度。例如在方向1上,当=03时,TH模型对应的RMSE为245 m,而J2摄动模型对应的RMSE为19 m。因此,可以预测J2摄动模型与TH模型存在相同的收敛域,都至少存在如表2所示的(a)、(b)和(c)三种镜像模糊轨道,下面将对该结论进行验证。
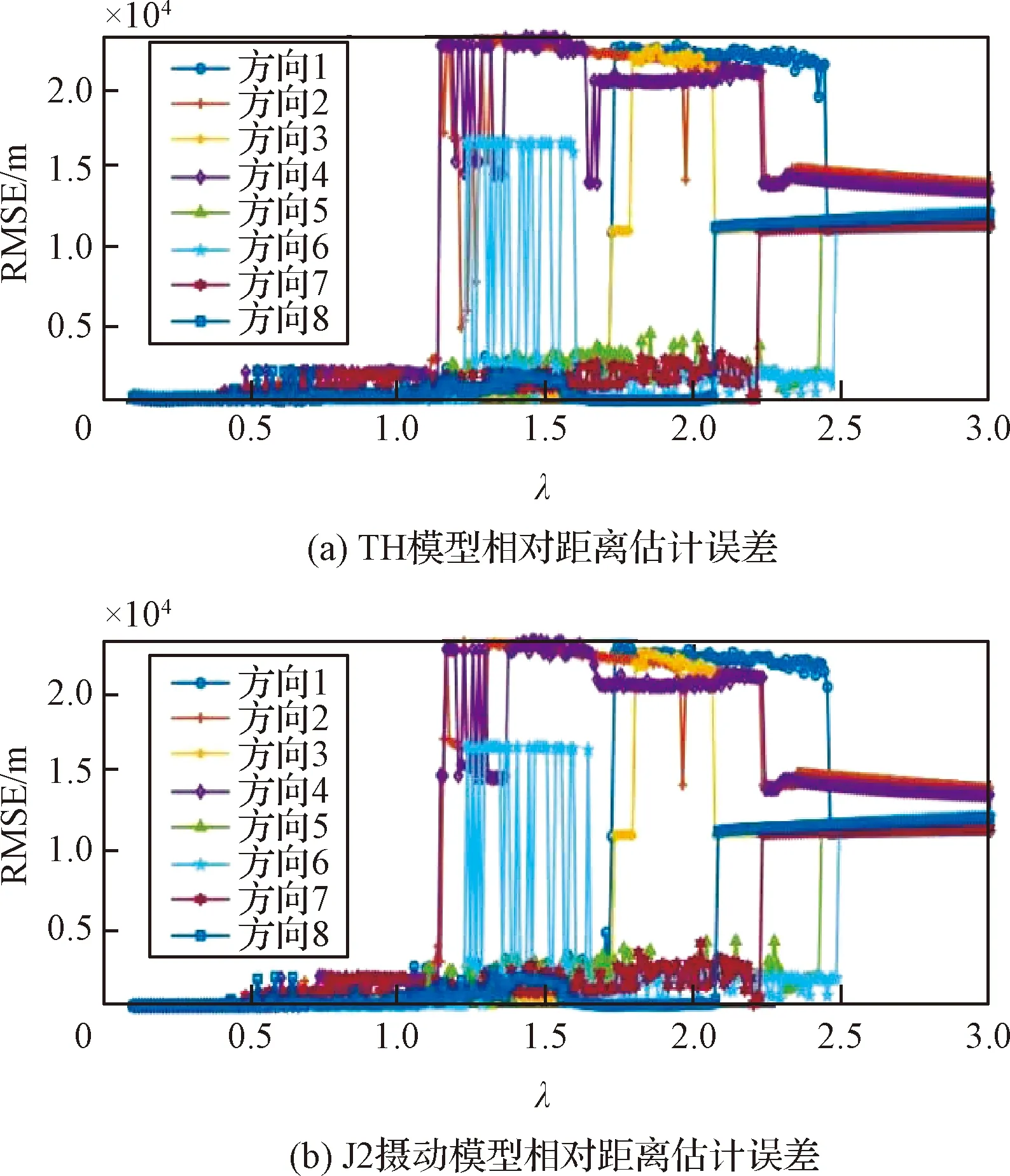
图1 航天器距离估计误差Fig.1 Graphs of relative distance estimation error
4.4 可观测性仿真校验
无味卡尔曼滤波4组状态初值设置见表2中真实轨道和镜像模糊轨道状态初值,其余滤波参数设置见表3。双星编队的轨道参数设置见表1中航天器1和2,通过设置不同滤波初值可以分别得到真实轨道和镜像模糊轨道。图2是J2摄动下仅测距相对导航系统的镜像模糊轨道与真实轨道。

图2 仅测距相对导航镜像模糊轨道Fig.2 Mirror ambiguous orbits for range-only relative navigation
从图2可以看出,因为J2摄动项的存在,蓝色实线表示的真实轨道不再闭合。但是三种镜像模糊轨道与真实轨道在三维空间内仍然具有相同的形状和大小,呈现“镜像”特性。验证了之前的可观测性分析结论:
1) 对于式(17)所示的仅测距相对导航系统,始终存在镜像模糊轨道;
2) 根据式(9)与TH方程设计的仅测距相对导航系统可观测性一样,都至少存在三种镜像模糊轨道。
5 编队航天器分布式相对导航
Wang团队研究了由三个航天器组成编队的分布式相对导航算法,并利用一致性滤波来提高系统的可观测性。三个航天器是相对简单的航天器编队,本节以四个航天器为例,研究不同分布式估计策略的相对导航精度与导航误差传播特性。
5.1 分布式估计策略
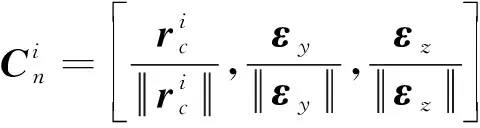
设无向图由顶点集合和边集合组成,顶点表示编队中的航天器,边表示两个航天器相邻,它们之间相互通信并估计彼此的相对运动状态。为了实现编队中任意两个成员的相对导航,无向图必须是连通的。这样即使两个航天器在无向图中不相邻,它们之间的相对运动状态也可以通过如下坐标转换矩阵与矢量运算得到

(21)

(22)


(23)

在某次更新相对运动状态时,无向图的边表示执行一次滤波算法,记计算量为。若无向图G的边个数为,则编队总的计算量为。图3是四个航天器组成编队的分布式估计策略,图3(a)是最简单的情形,其计算量也最少(为3),图3(b)、(c)和(d)估计策略的计算量分别为4,5和6。以图3(a) 为例,航天器2相对于航天器1的运动信息可以通过滤波算法获得,而航天器3和航天器4相对于航天器1的运动信息需要通过式(21)所示的关系计算得到。

图3 四个航天器组成编队的分布式估计策略Fig.3 Decentralized estimation strategy for spacecraft formation
5.2 相对导航误差传播规律
为了研究编队相对导航误差传播规律,本节采用蒙特卡洛打靶法。轨道和滤波参数设置分别见表1和表3,滤波初值误差δ为相对运动状态初值的0.1倍。另外,与4.3节可观测性数值分析的仿真中假设追踪器在系下的位置和速度精确已知不同,本节与第6节的仿真中均为表1所示四个航天器在系下的初始位置和速度添加均值为0、方差分别为10 m和0.1 m·s的高斯误差。
以图3(a)最简单三条边估计策略为例,图4是航天器2、3、4相对于航天器1的200次蒙特卡洛打靶仿真的距离估计误差统计结果。图4中蓝色双划线、橙色实线和红色点划线分别代表估计误差的+3σ边界、均值和-3σ边界,边界值表示导航精度,边界范围表示导航稳定性。8000 s时,航天器1和2相对距离估计误差在13 m到18 m之间。相比之下,8000 s时航天器1和3相对距离估计误差较大,在42 m到74 m之间。8000 s时航天器1和4相对距离估计误差最大,在77 m到150 m之间。

图4 相邻和非相邻成员相对距离估计误差Fig.4 Relative distance estimation error for nearby and no-nearby members


(24)

(25)
式中:表示相关的状态量估计误差。另外,不同航天器进行相对导航时的滤波算法和数据链测距结果是相互独立的,相对导航误差也是相互独立的。式(24)和式(25)的导航误差是近似线性叠加的,这揭示了编队航天器相对导航的误差传播规律。因此,在实现编队中两个航天器的相对导航时,应尽可能利用这两个航天器的相对测距信息并进行滤波。
6 编队航天器一致性算法
式(21)是航天器相对运动状态需要满足的物理约束,通过在滤波状态更新算法中引入该等式确定的先验估计,可以设计一致性滤波算法。一致性滤波算法与UKF算法结合,便得到一致性无味卡尔曼滤波算法(CUKF)。因为时间更新方程和UKF相同,下面仅给出一致性滤波算法的状态更新方程


(26)

以图3(b)左边四边形环估计策略为例,研究CUKF算法下航天器相对导航系统可观测性。仿真的轨道和滤波参数设置见表1和表3,令航天器1对航天器2的初始相对导航误差为δ=2δ,δ见表4。图5对比了UKF和CUKF滤波结果的相对距离估计误差,由图可知,在CUKF算法下仅测距相对导航系统是收敛的,验证了一致性算法对于提高系统可观测性的作用。

图5 UKF与CUKF相对距离估计误差Fig.5 Relative distance estimation error under UKF and CUKF
7 结 论
本文研究了近地轨道航天器在不完备测量即仅有相对距离情形下的相对导航问题,建立了航天器在地球非球形引力J2摄动下的仅测距相对导航系统,并对系统进行了可观测性分析和分布式估计策略设计。论文的主要研究成果包括四个方面:
1) 推导了航天器在地球非球形引力摄动下线性的J2摄动相对运动模型,该模型适用于航天器运行在圆或椭圆轨道的情形;
2) 可观测性分析结果表明,利用J2摄动相对运动模型设计的仅测距相对导航系统不可观测,存在三种镜像模糊轨道;
3) 对于四个航天器组成的编队,设计了六种不同的分布式估计策略,理论上分析并通过数值仿真校验了航天器相对导航的误差具有近似线性传播的特性;
4) 对比了一致性算法和无味卡尔曼滤波算法的蒙特卡洛打靶结果,验证了一致性算法对于提高系统可观测性的作用。
下一步的研究将从利用航天器轨道机动提高仅测距相对导航系统可观测性的角度出发,研究仅测距编队控制问题。
