基于STOA-VMD的串补输电线路故障测距
2022-09-21商立群裴超
商立群,裴超
(西安科技大学 电气与控制工程学院,陕西 西安 710054)
近年来,随着我国工业用电和居民生活用电的不断增加,电力资源愈加匮乏,超高压、远距离、大容量输电线路在我国各省市之间得到了广泛运用。串联补偿装置的使用,能够提高系统的稳定性和线路输送能力,改善电压质量,合理分配环网中的潮流[1]。但是,串补装置的加入对故障测距带来了一定的困难,故障特征信息的分离和提取成为串补线路故障测距的关键。目前,串补输电线路的测距方法主要有故障分析法[2-5]、行波法[6-9]。
故障分析法利用故障电压、电流信息量,通过解方程计算得到故障距离。文献[2]使用基于阻抗的故障定位方法,利用双端的电压、电流和序阻抗的信息,构造定位函数,定位函数的最小值对应的距离就是故障距离。文献[3]将串补输电分别建立R-L模型和分布参数模型,先判断故障区段,再利用最小二乘法计算得到的故障后电感值与单位长度电感值之比进行故障测距。文献[4]利用推导的本端电压和对端电流,得到求本端电流的公式,再结合故障边界条件,通过计算得到测距函数。使用故障分析法对串补输电线路故障测距时,金属氧化物限压器(metal oxide varistor,MOV)呈非线性,会使串补装置两端电压难以计算,串补装置进行建模时也存在误差[5]。双端故障分析法存在伪根判别,对测距结果也有一定的影响。
行波法通过行波的折反射,提取故障信息,结合测距算法实现故障测距。文献[6]用单端行波法测距,利用初始行波波头极性以及小波变换模极大值极性,判断故障区段和行波到达时刻,实现故障测距。文献[7]对小波分解后的故障特征信号进行电磁时间反转,通过反转的电流信号假设故障点的位置,计算此时的电流有效值,最大的电流有效值对应的位置即是实际的故障点。但是小波变换受分解尺度和小波基的影响,当行波信号中存在较大的噪声时,小波变换可能无法准确检测出行波波头。文献[8]使用经验模态分解(empirical mode decomposition,EMD)对故障行波进行分解,以此检测故障行波信号,但是EMD受模态分量混叠影响,会造成较大误差。文献[9-10]通过改进EMD算法,使用集合经验模态分解(ensemble empirical mode decomposition,EEMD)抑制模态混叠现象,但是噪声仍会对EEMD造成影响。
为解决串补线路双端行波法的电流波头难以检测且受噪声干扰影响测距精度的问题,本文采用乌燕鸥算法(sooty tern optimization algorithm,STOA)与变分模态分解(variational mode decomposition,VMD)结合的故障测距方案。VMD作为一种故障特征提取方法,能够克服模态混叠和频率效应等缺点[11],可以在噪声较严重条件下,提取行波的波头信号[12]。但是根据VMD的算法原理,模态量和惩罚因子的值会影响最终的分解结果[13]。STOA可以对VMD进行优化,为VMD选择合适的模态量和惩罚因子的值,同时结合适应度函数可以直接选出合适的固有模态分量(intrinsic mode function,IMF)[14],不需要人工选择IMF。最终使用对称差分能量算子(symmetric differential energy operator,SDEO)结合双端行波法实现故障定位,并通过仿真验证其可行性。
1 基本原理
1.1 故障行波的VMD
VMD是一种完全非递归、自适应的变分模态分解方法,由变分约束模型的构建和模型的求解2部分构成,其本质是通过求解带有约束条件的变分模型,得到每个模态分量的中心频率和带宽[15-16]。
a)故障行波变分约束模型的构建。对于故障行波信号f的每个模态分量进行Hilbert变换,混合预估中心频率指数项e-jωkt,将每个模态的频谱调制到基频带,计算各基频带的平方范数。得到的故障行波变分约束模型如下[17]:
(1)
式中:δ为狄拉克函数;t为时间;*表示卷积;{ωk}=ω1,ω2,…,ωK为各个模态分量的中频率;{uk(t)}(k=1,2,3,…,K)为K个模态分量。
b)故障行波变分约束模型的求解。引入二次惩罚因子α和拉格朗日乘法算子λ(t),从而得到求解故障行波变分问题的增广拉格朗日函数
L({uk},{ωk},λ)=

(2)
通过交替方向乘法算子(alternate direction method of multipliers,ADMM),对变分约束模型反复迭代计算,找到增广拉格朗日函数的鞍点,即为变分模型最优解。
1.2 STOA
STOA是一种基于种群的仿生元启发式算法,于2019年由 G.Dhiman 和 A.Kaur提出,目的是提升工业优化问题的求解性能。STOA具备良好的全局搜索能力,精度和优化速度要强于粒子群算法、蚁群算法等传统优化算法[16]。STOA模拟了现实生活中乌燕鸥的迁徙和攻击行为,具体描述如下。
1.2.1 迁徙过程
迁徙的定义是乌燕鸥为了寻找更加丰富的食物来源,获得足够的能量而从一个地方到另一个地方的季节性迁徙。在迁徙过程中,成群结队的乌燕鸥在不发生碰撞的条件下向最适合生存的方向,即适应度值较低的方向行进。其过程主要可分为碰撞避免、聚集和更新3个部分。
a)碰撞避免。不发生碰撞下乌燕鸥的位置
Cst=SAPst(z),
(3)
SA=Cf-z(Cf/Zmax).
(4)
式(3)、(4)中:Pst为乌燕鸥当前的位置;z为当前的迭代次数,z=0,1,2,…,Zmax,Zmax为最大迭代次数;SA为用来计算碰撞避免条件下新的位置的变量;Cf为用来调整SA的控制量,设置为2。
b)聚集。在不发生碰撞条件下,通过聚集使乌燕鸥向适宜的位置靠拢,也就是在实际问题中向最优解方向聚集。其表示为:
Mst=CB(Pbst(z)-Pst(z)),
(5)
CB=0.5Rand.
(6)
式(5)、(6)中:Mst为最优解位置的方向;Pbst(z)为最优乌燕鸥的位置;CB为提高搜索空间的随机变量;Rand为0~1之间的随机数。
c)更新。乌燕鸥向最优解位置更新轨迹,其轨迹
Dst=Cst+Mst.
(7)
1.2.2 攻击过程
在迁移过程中,乌燕鸥可以调整自身的飞行速度和攻击角度,其在空中盘旋的运动模型为[19]:
x′=Rsin(i),
(8)
y′=Rcos(i),
(9)
z′=Ri,
(10)
R=ueih.
(11)
式(8)—(11)中:x′、y′、z′为空间坐标值;R为每个螺旋的半径;i为[0,2π]范围之间的变量;u和h为螺旋形状的常数,设为1。乌燕鸥的位置按照式(12)更新。
Pst(z)=Dst(x′+y′+z′)×Pbst(z).
(12)
1.3 峭度因子
峭度因子(kurtosis factor,KF)反映了随机变量的分布特性,它可以用来度量信号在某一频率上的概率密度函数的峰值大小[20]。其公式为
(13)
式中:Kf为峭度因子值;s为振动信号;μ为信号的均值;σ为信号的标准差;E表示数学期望。
1.4 对称差分能量算子
对称差分能量算子(symmetric differential energy operator,SDEO)是对传统能量算子的改进,能够迅速跟踪信号的瞬时能量,不易受信号突变点附近瞬时能量波动的影响[21]。SDEO的具体公式为:
φ(x(n))=
(14)
φ(x(n))=x(n)2-x(n-1)x(n+1).
(15)
式中:x(n)为离散信号;φ(x(n))为x(n)的能量差分算子。
2 基于STOA-VMD的串补线路测距方案
2.1 串补装置对测距算法的影响
在串补线路中,串补电容的存在会破坏输电线路的均匀性,对基于阻抗的测距算法造成影响。
当线路中发生故障时,由于电压行波经过电容时电压不能突变,串补电容两侧存在电压差,故障电压波通过串补电容需要一定的时间,因此使用电压行波故障测距存在一定的误差。电流行波通过串补电容时没有时间差,可以用作故障测距。但是,与电压行波相比,电流行波在幅值上有较大的差异,系统阻抗较大时,电流行波突变量比电压行波突变量相对幅值小,受噪声影响较大,理论上较难测量[22]。因此,在噪声条件下准确检测行波波头到达检测端的时间成为故障测距的关键。
由于MOV与串补电容并联,MOV作为非线性元件,它的导通需要电压达到一定的阈值条件,即使在最严重的故障条件下,MOV导通也需要数毫秒时间(通常大于6 ms)[23],本文的线路长度L为300 km,行波波速v取2.95×105km/s,故障行波到达检测端的最大时间
tmax=L/v=1.017 ms<6 ms.
(16)
因此,故障录波装置在MOV动作之前就能检测出故障电流行波信号,所以本文所使用的方法不需要考虑MOV的动作特性。
2.2 测距基本原理
行波测距算法分为单端法和双端法,当线路较长时,单端法受MOV导通后产生行波的影响,导致测距失败。在串补输电线路中,双端行波测距算法如下[24]:
(17)
(18)
式(17)、(18)中:dM、dN为故障点到线路M、N端的距离;tM、tN为行波到达M、N端的时间。
2.3 故障测距步骤
建立STOA和VMD结合的串补输电线路双端行波测距流程(如图1所示),算法如下:

图1 故障测距算法流程
a)利用故障录波装置对串补输电线路M、N两端的电流行波进行记录。
b)通过Karrenbauer 变换对故障电流解耦,选取1模电流信号用于测距。
c)在MATLAB中通过STOA优化算法对VMD的模态量K和惩罚因子α进行优化,选取STOA的种群数为40,迭代次数为40次,K的取值范围为3~10,α的取值范围为100~5 000,使用峭度值的倒数作为目标函数进行寻优,在迭代过程中的峭度值倒数的最小值(也就是最大峭度值)所对应的K和α值。
d)利用优化后取得的K和α值对解耦后电流信号进行VMD,对峭度值最大的IMF利用SDEO检测出故障电流行波到达线路M、N两端的时间点。
e)判断行波到达线路M、N两端的时间长短,分别利用式(17)和式(18)计算出故障点的位置。
3 串补线路故障仿真
3.1 仿真模型
使用ATP-EMTP建立图2所示仿真模型[25]。线路电压等级为500 kV;串补电容C=95.74 μF,位于线路中点,串补度为40%,接地电阻10 Ω;M端系统——正序阻抗Zm1=(6.139+j52.98)Ω,零序阻抗Zm0=j130.6 Ω;N端系统——正序阻抗Zn1=(17.56+j46.11)Ω,零序阻抗Zm0=(1.6+j65.13)Ω;线路参数——正序电阻r1=0.027 9 Ω/km,零序电阻r0=0.253 Ω/km,正序电感L1=0.882 mH/km,零序电感L0=2.33 mH/km,正序电容C1=0.013 06 μF/km,零序电容C0=0.008 5 μF/km,线路总长度L=300 km。

图2 串补输电线路仿真模型
采样频率为1 MHz,故障发生在0.02 s,记录 0.018~0.023 s 时M、N两端的电流数据。
3.2 仿真分析
假设A相发生接地故障,且故障点距离线路M端50 km。对M、N两端的故障电流进行解耦得到波形的1模分量分别为im1、in1,如图3所示。

图3 1模电流
为了验证本文算法提取行波波头的优势,分别与VMD和EMD测距算法作对比。对N端电流1模分量分别加入信噪比(signal to noise ratio,SNR)为50 dB、60 dB、70 dB的高斯白噪声,分别采取VMD和EMD,VMD的模态量取4,惩罚因子取2 000。图4和图5是N端电流1模分量经VMD、EMD后的第一个IMF(IMF1)的分量inv1、ine1。
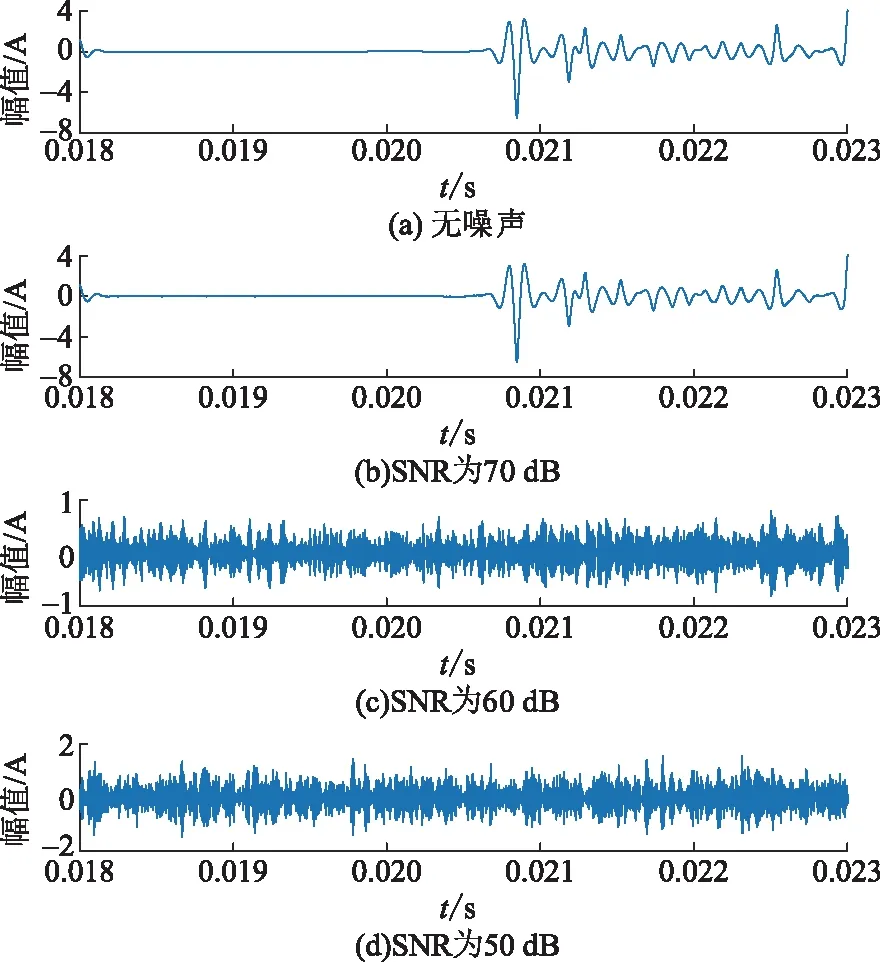
图4 VMD后的N端电流IMF1分量inv1

图5 EMD后的N端电流IMF1分量ine1
对图4和图5的IMF1分量inv1、ine1,采取SDEO检测行波波头到达检测端的时间,结果如图6、图7所示。

图6 inv1的SDEO波头时间标定

图7 ine1的SDEO波头时间标定
由图6和图7可知,由于电流行波的波头较缓,随着电流行波中噪声的增大,难以准确检测行波波头到达检测端的时间。
为了准确提取出故障特征,采用本文的STOA-VMD的方法对信号进行故障特征提取,对于上文中不同SNR的电流1模量,采用STOA优化VMD的模态和惩罚因子。SNR为50 dB时,优化后的K=9,α=3 252;SNR为60 dB时,优化后的K=6,α=355;SNR为70 dB时,优化后的K=8,α=100;无噪声时,优化后的K=10,α=100。对应的峭度值见表1。

表1 in1信号VMD后各分量峭度值
选取表1中峭度值最大的IMF分量(invmax),使用SDEO检测行波波头,检测结果如图8所示。

图8 STOA优化后invmax的SDEO波头时间标定
对比图6、图7和图8,可以看出,STOA-VMD行波波头检测方法可以在更大的噪声条件下,准确检测出行波波头,提高了故障测距的精确度。
同理对im1分量先进行STOA优化,得到K=10,α=189,同时得到各IMF的峭度值如表2所示。

表2 im1信号VMD后各分量峭度值
由表2可知,在IMF9处,峭度值取得最大值13.61,因此对IMF9分量使用SDEO检测故障电流行波到达M端的时刻,如图9所示。

图9 故障电流行波到达M端时间
由图8、图9可知,故障电流行波到达M端、N端的时间分别是0.020 170 s、0.020 847 s,由测距公式(17)可得故障点距离M端50.14 km,计算误差为0.14 km。因此,使用STOA-VMD的串补线路故障测距方法能够较为准确地检测出故障点的位置。
3.3 不同故障位置的测距结果
根据图2所示仿真模型,记录不同故障位置电流行波到达线路M、N两端的时间点(tM、tN),根据式(17)和式(18)计算故障点的位置,并计算误差率:
误差率=|实际故障距离-计算值|/线路全长
表3是在串补线路中A相发生接地故障、使用STOA-VMD进行故障测距时不同故障位置的测距结果,故障接地电阻为10 Ω。
由表3可知,在不同故障位置,STOA-VMD的测距的结果相对误差较小,测距误差在0.2%以内。

表3 不同故障距离的测距结果
3.4 不同故障类型对测距的影响
表4是在不同故障点发生各种类型故障时的故障测距结果。其中A、B、C代表三相线路,G为大地。

表4 不同故障类型对测距结果的影响
由表4可知,不同的故障类型对串补输电线路的测距结果影响较小,测得的故障误差率保持在0.2%以内。
3.5 过渡电阻对测距的影响
表5是在不同过渡电阻下串补线路发生单相接地故障时的测距算法结果。由表5可知,故障电阻的测距结果影响很小,故障误差率在0.2%以内。

表5 过渡电阻对测距结果的影响
4 结束语
本文针对串补线路进行故障测距时,因故障行波出现噪声面无法有效提取特征信号的问题,在考虑串补电容和MOV非线性保护装置启动时间的基础上,提出了基于STOA优化的VMD信号分解方法。该方法能够解决VMD的模态量和惩罚因子选择困难的问题,可以在串补输电线路的故障行波信号含噪声条件下实现特征信号的有效提取,通过SDEO计算最大峭度值的IMF,简单有效地确定故障突变点的时间,利用双端行波测距方法实现故障位置的有效确定。仿真结果表明该方法不受故障类型和过渡电阻的影响,具有较高的定位精度。
