基于MATLAB的包装箱盖章机构仿真分析及优化设计
2022-09-16陆武慧
陆武慧
(西安航空职业技术学院 通用航空学院,西安 710089)
0 引言
盖章机构是在产品包装完成后盖上相关印记的一种机构。因此,合理确定盖章机构的运动特性,保证盖章动作的准确和顺利进行,对提高盖章工作效率有重要的意义,也有助于缩短产品生产周期。
目前盖章方式多以手动盖章为主,存在费时、费力和工作效率低等缺点。陈琼等[1]研究了自动盖章机的结构设计与控制方案;李占贤等[2]研究了学生证自动盖章机的设计;周波等[3]研究了基于PLC的自动贴标封箱机设计。现有研究对盖章机盖章功能的实现包括曲柄连杆机构和齿轮齿条机构的应用,以及齿轮、齿条、凸轮和弹簧等的组合应用等,未涉及到使用多连杆的组合机构实现盖章功能。本文针对包装箱盖章机构的优化设计问题,通过Simulink工具搭建盖章机构的仿真模型,对适用于盖章机构的运动特性进行仿真计算,得到盖章机构的位移、速度和加速度等重要参数的变化规律,为盖章机构的运动特性分析提供一种快速有效的仿真方法,保证盖章过程工作运行稳定,且盖章位置操作准确等特点。利用MATLAB优化工具箱中的遗传算法模块进行优化设计[4-7],为盖章机构的参数化设计和进一步优化提供参数依据,具有一定的工程意义[8-9]。
1 包装箱盖章机构的运动分析
为配合生产线包装箱的盖章动作,符合自动化生产线的工作节拍,实现周期性盖章,将包装箱盖章机构简化为五杆机构与四杆机构的组合机构,如图1所示。当主动曲柄转动时,带动连杆、后摇杆、盖章杆和前摇杆转动,后摇杆和前摇杆固结在机架上,通过组合机构驱动盖章杆在印泥盒处吸取印泥,之后通过盖章杆的运动给产品包装箱上盖章,然后往复运动,完成批量产品周期性盖章动作。
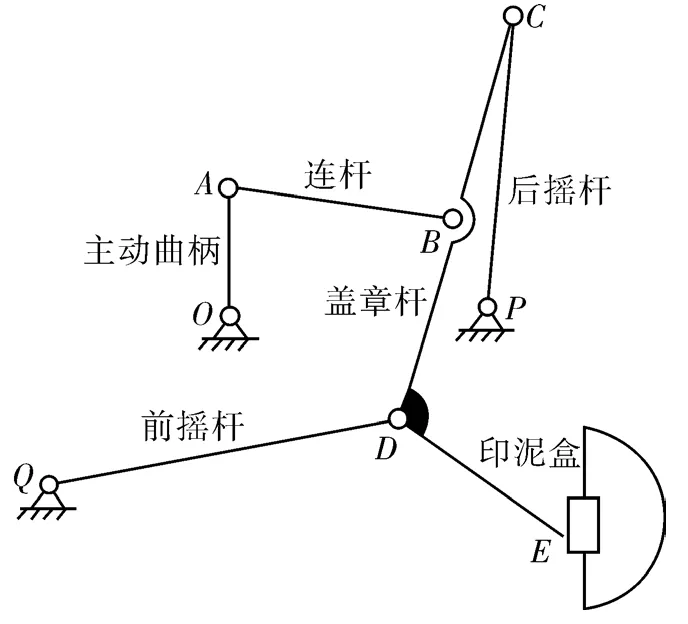
图1 包装箱盖章机的机构简图Fig.1 Mechanism diagram of the packing box stamping machine
定义φ1,φ2,φ3,φ4,φ5,φ6,φ7分别为与x轴正向的夹角,根据机构简图可知φ5=φ3-π。
定义φ0为盖章杆D点处的夹角,即φ0=∠CDE。
定义ω1,ω2,ω3,ω4,ω5,ω6,ω7分别为杆OA、AB,BC,CP,BD,DQ,DE的角速度,α1,α2,α3,α4,α5,α6,α7分别为上述各杆的角加速度。
盖章机构闭环矢量方程:
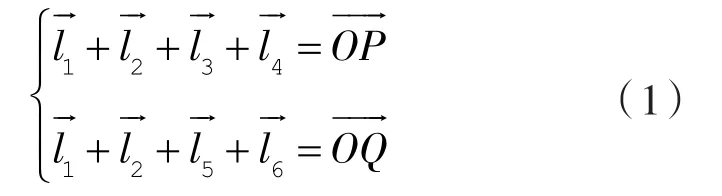
将闭环矢量方程写成三角函数形式,消去φ5之后,得出位置方程:
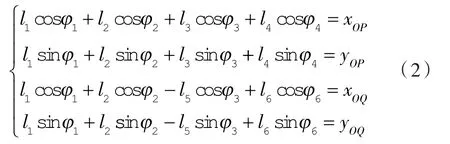
方程组中xOP,yOP,xOQ,yOQ为已知量,φ1为初始条件给定值,可求解得到φ2,φ3,φ4,φ6的值。
位置方程对时间求导,得到速度方程,整理成矩阵形式:
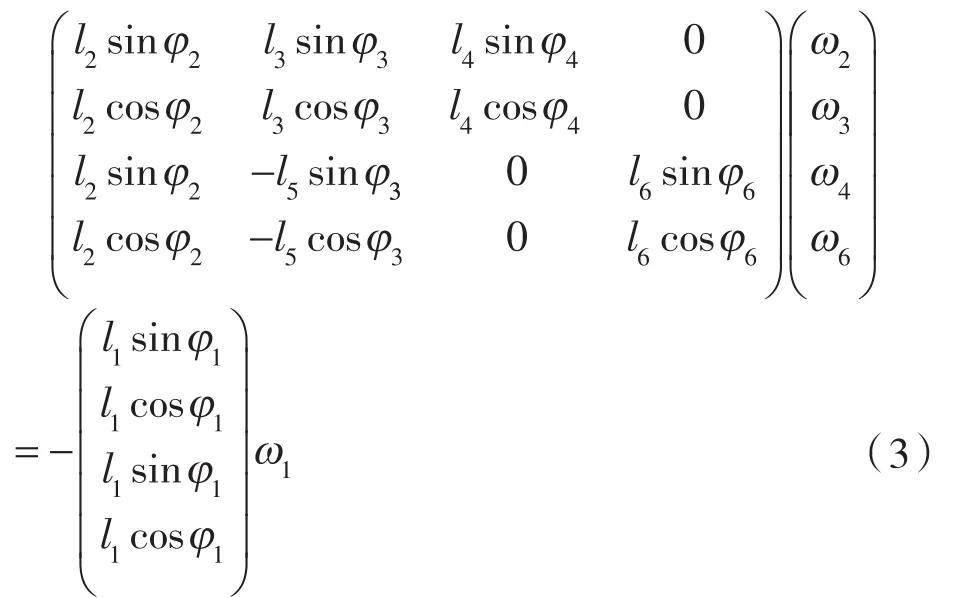
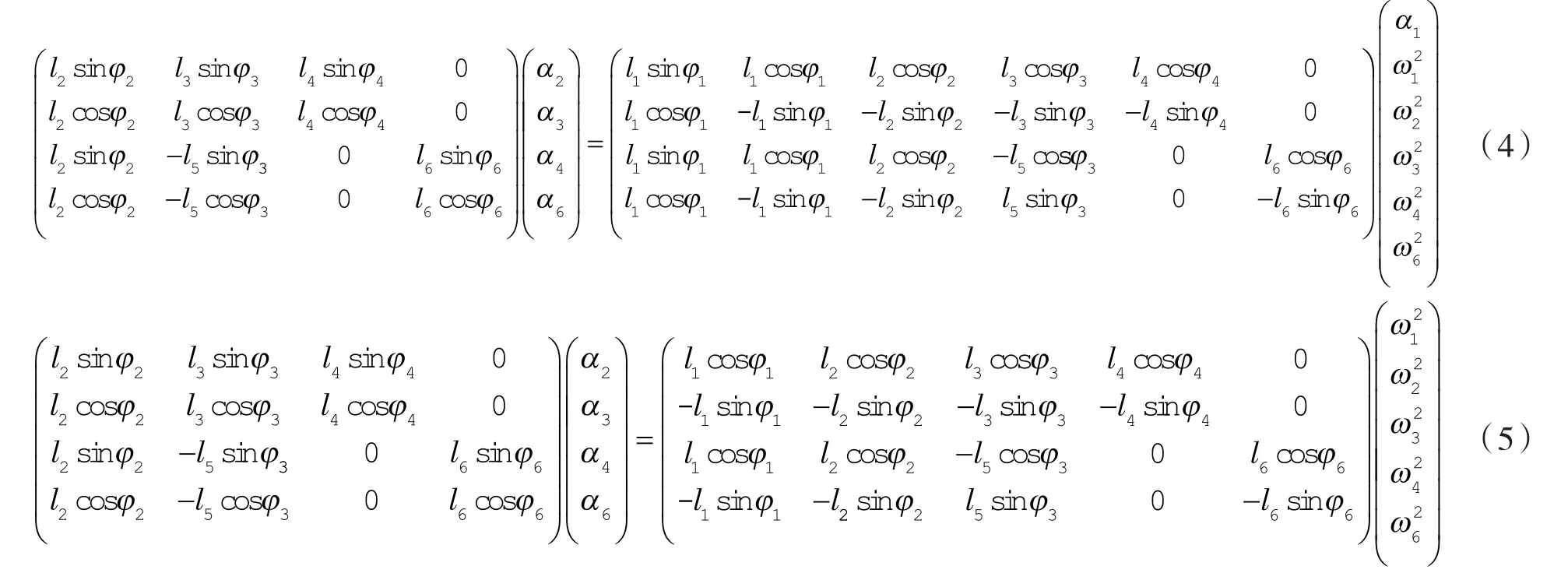
速度方程对时间求导,得到加速度方程,整理成矩阵形如式(4)。
若主动曲柄为匀角速度转动,即α1=0,则加速度方程简化为式(5)。
由图中矢量关系,得到盖章机构上末端点E的位置方程:

求导得到盖章机构上末端点E的速度方程:

再求导得到盖章机构上末端点E的加速度方程式:

由此可得盖章机构上点E的位置、速度和加速度特性。
2 仿真模型建立
2.1 Simulink仿真平台
Simulink是MATLAB软件中常用的一种仿真工具,经常用于系统设计、信号处理和动力学仿真等。Simulink使用图形编辑器和自定义的模块库,通过求解器进行系统建模和仿真。利用Simulink工具进行机构的运动学和动力学仿真计算,方便观察机构的运动特性,为机构的进一步优化设计提供依据[10-12]。同时Simulink仿真平台也可以与ADAMS软件等共同进行机构仿真。
2.2 盖章机构Simulink仿真模型建立
对包装箱盖章机构进行结构简化,建立盖章机构运动学模型,运用MATLAB中Simulink工具对盖章机构进行动态仿真设计,以此获得机构末端的运动特性和规律。
Simulink仿真模型的输入参数由3部分构成。第1部分为曲柄的角速度,模型中表示为常量omg1;第2部分为简化模型的各个杆长、盖章杆夹角和固定端铰链坐标,模型中表示为常量数组模块l;第3部分为初始状态下各杆与x轴正向的夹角,在模型中表示为6个积分器的初值,通过求解机构的位置方程得到。
根据机构仿真需要,建立3个嵌入式MATLAB函数模块:角速度求解模块“solve_omg”以曲柄角速度、各杆杆长和固定端坐标、各杆与x轴正向的夹角为输入参数,通过求解机构的速度方程,得到各杆的角速度值,并作为6个角度积分器的输入;角加速度求解模块“solve_alpha”以各杆杆长和固定端坐标、各杆与x轴正向的夹角、各杆角速度为输入参数,通过求解机构的加速度方程,得到各杆的角加速度;盖章杆末端运动求解模块“solve_tip”通过求解盖章机构上点E的位置方程、速度方程和加速度方程,得到点E的位置、速度和加速度特性。
3 模型仿真分析
3.1 验证机构合理性
利用Simulink工具对包装箱盖章机构实际运动过程进行运动学仿真计算,得到机构末端的位移、速度和加速度曲线。
以包装箱盖章机构的末端为研究点,盖章机构的运动曲线光滑平稳,具有周期性,如图2-4所示。整体机构运行过程平稳,证明盖章机采用该组合机构的合理性。
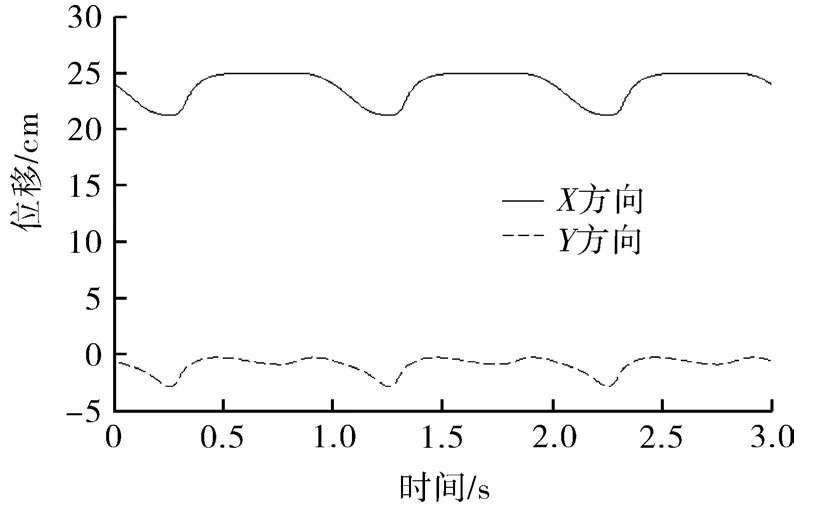
图2 盖章机构末端X、Y方向位移曲线Fig.2 X- and Y-direction displacement curves of the end of the stamping mechanism
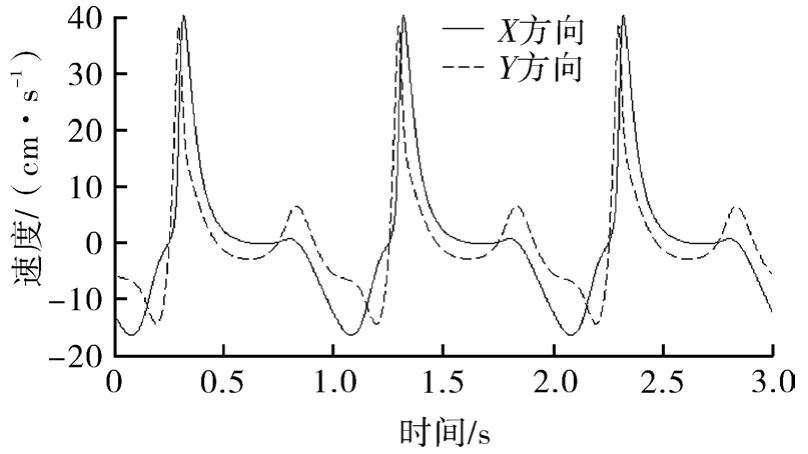
图3 盖章机构末端X、Y方向速度曲线Fig.3 X- and Y-direction velocity curves of the end of the stamping mechanism
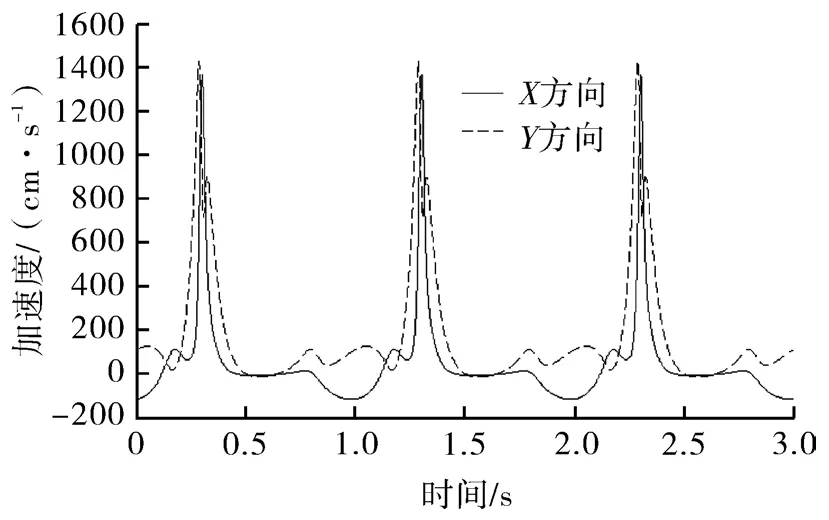
图4 盖章机构末端X、Y方向加速度曲线Fig.4 X- and Y-direction acceleration curves of the end of the stamping mechanism
3.2 机构优化设计
基于MATLAB优化工具箱中的遗传算法优化模块,进行包装箱盖章机构优化设计。根据盖章机构的功能需求,考虑后摇杆长度对盖章功能的影响,对其进行参数化取值,以达到合理的盖章高度。
在遗传算法优化模块中,设置变量数为1,即后摇杆长度,参数化取值范围为10~10.5 cm,适应度函数为当前盖章高度与目标盖章高度的距离;设置遗传算法种群中个体数量为20,种群中个体的适应度函数演化如图5所示。

图5 种群适应度函数演化过程Fig.5 Evolution of population fitness function
横坐标为种群演化代数,纵坐标为适应度函数,每条竖线段的两端表示种群中个体适应度函数的最小值和最大值,中间的曲线表示种群中个体适应度函数的平均值。可以看出,随着演化的进行,种群适应度函数逐渐趋近最优,从第15代开始,种群中已有个体适应度函数达到10-5量级,满足优化目标。最终优化后的后摇杆长度为10.116 3 cm。
盖章机构末端Y方向位移曲线的初始解和优化解的对比如图6所示,优化解的盖章高度趋近于目标盖章高度。机构优化结果合理,优化后的盖章高度可以满足功能需求。
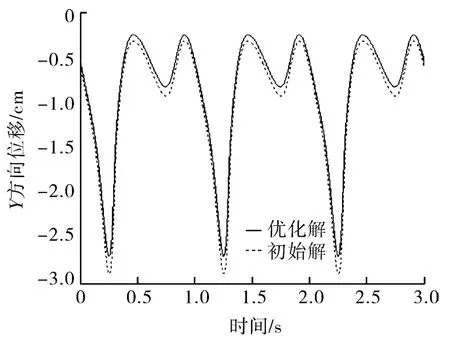
图6 盖章机构末端Y位移曲线优化前后对比Fig.6 Comparison between original and optimized Y-direction displacement curves of the end of the stamping mechanism
4 结语
通过MATLAB软件中Simulink模块对包装箱盖章机构进行仿真模型建立,得出盖章机构末端的运动曲线,符合工程实际情况,验证包装箱盖章机构的合理性。根据盖章机构的功能需求,考虑后摇杆长度对盖章功能的影响,采用MATLAB优化工具箱中的遗传算法优化模块,对包装箱盖章机构进行优化设计。结果表明,后摇杆长度对盖章高度的准确性有重要影响,优化后的盖章机构可以满足功能使用需求,证明仿真的正确性和合理性。通过MATLAB软件实现对盖章机的机构仿真分析及优化,为工程实际应用和进一步的动力学分析提供依据。
