星载激光雷达望远镜主镜组件设计与分析
2022-09-16邢昆明
李 路,邢昆明,赵 明,施 云
(1.皖西学院 机械与车辆工程学院,安徽 六安 237012;2.中国科学院合肥物质科学研究院 中国科学院大气光学重点实验室,安徽 合肥 230031)
0 引言
随着全球人口增长,人类对自然资源不断索取,各种恶劣天气(干旱、暴雨、闪电、火山爆发、极寒等)出现频率增多,研究者们研究证明表明与云-气溶胶有着密切的关系。因此,获取准确的全球云-气溶胶信息对气候具有非常重要的意义。
较于地基、机载激光雷达,星载云-气溶胶激光雷达具有运行轨道高,探测范围广,可精确获得全球云-气溶胶探测数据。望远镜主镜作为星载激光雷达接收系统的主要部件,其组件结构的稳定性是直接影响激光雷达探测性能。
本文主要以Φ400mm星载激光雷达望远镜主镜为研究对象,从材料选择、轻量化、结构形式和固定方式等方面对主镜组件进行设计,并对其组件力学稳定性进行分析研究。
1 主镜组件设计
1.1 主镜超轻量化结构
主镜支撑方案可分为:侧面支撑、中心支撑、背部支撑以及复合支撑。本文根据文献所设计的主镜超轻量化结构模型,如图1所示,对其支撑结构进行设计与分析。该激光雷达望远镜主镜材料采用SiC,重量约为4.4kg,轻量化率较实体镜体达到80%,采用背部三点支撑。
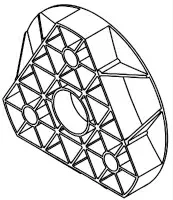
图1 主镜超轻量化结构图
1.2 胶接件结构设计
胶接件主要作用实现主镜与背板联接的主要结构。在设计胶接件时,首先选择合适的材料必须与主镜的线膨胀系数接近,来降低在热环境下热应力的影响,因此本文设计的胶接件采用线膨胀系数极低的殷钢材料,来实现与主镜材料相匹配。选择合适的胶接剂,直接关系到胶接性能,本文选择GHJ-01(Z)型环氧胶,因为其具有收缩率小、粘结强度高以及热稳定性好等优点。由于其固化收缩会产生较大的粘结应力,所以设计胶接件时,必须设计合适的胶接面积,使得胶接剂在固化收缩过程中产生较小的粘结应力,来提高胶层的粘结强度。主镜光机组件在胶结时,其最小胶结面积计算公式如下:

上式中,W为主镜重量;α为恶劣环境下的加速度;f为安全系数,取值范围为2~4;J为胶结计的抗拉或抗剪强度。
已知主镜质量约为4.4 kg,胶结剂拉伸强度约为14 MPa,在最恶劣环境400g加速度工况下,安全系数取4,则利用公式1计算出最小粘结面积为502.86mm。为了减小胶接应力,对胶接件进行开豁口处理,通过增加粘结区域的胶接件柔度,来补偿胶层的收缩量。本文所设计的胶接件结构如图2所示,采用六点均布粘结,重量约为0.29 kg。

图2 胶接件模型图
1.3 柔性支撑结构设计
柔性支撑结构是通过降低自身结构刚度来降低主镜在不同工况下(运输、发射、在轨运行等载荷冲击)对面型精度的影响,同时减小由温度变化引起的热变形。考虑实际加工技术及便于设计,选择切口型柔性支撑结构,其结构简单,广泛运用于空间主镜支撑结构中。根据柔性支撑结构回转轴数目的不同,一般可分为单轴、双轴、多轴及正交柔节4种方式,如图3所示。

图3 四种典型柔节图
本文基于多轴柔性支撑结构形式,设计了一种新型多轴复合柔性支撑结构,材料为钛合金。通过有限元技术计算,确定如图4所示结构,其一阶自由频率远远大于200 Hz。该结构的回转平台与胶接件通过螺钉连接,支撑座与背板通过销钉定位,螺钉连接的方式,通过柔性环节来减小主镜装配应力。
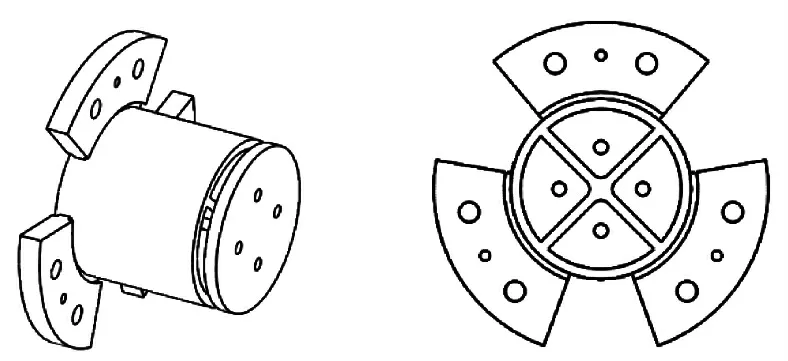
图4 多轴复合柔性支撑结构图
1.4 背板结构设计
主镜背板主要承力部件,其结构刚度要求高于500 Hz,且要求热膨胀系数与主镜材料相接近,因此采用铝基碳化硅材料,通过轻量化设计,获得如图5所示的主镜背板结构模型。背板总重量约为2.9 kg,通过有限元分析,其一阶自然模态频率远远大于500 Hz。
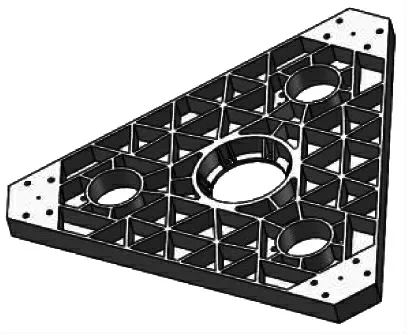
图5 主镜背板图
1.5 中心芯轴结构设计
中心芯轴起到主镜径向限位的作用,与主镜采用间隙配合,通过轻量化设计,获得如图6所示的中心芯轴结构模型,其材料采用碳基碳化硅复合材料,与主镜背板采用2个销钉精确定位,6个M5螺钉固定。

图6 中心芯轴图
2 主镜组件力学特性分析
如图7所示,为主镜光机组件结构设计方案,主要有主镜(4.4kg)、胶接件(0.23kg×3)、柔性支撑件(0.3kg×3)、中心芯轴(0.18kg)和背板(2.9kg)组成,总重为9.07kg。

图7 主镜组件爆炸图
如图8所示,为望远镜主镜组件的有限元模型,共有450 538个节点和238 217个网格单元,建立坐标系XYZ。

图8 主镜组件有限元模型图
2.1 主镜组件静力学分析
对主镜组件进行静力学分析,获得主镜镜面节点变形原始数据,通过MATLAB软件自行编制的程序分离刚体位移,通过Zernike多项式对主镜面型进行拟合,获得去除刚体位移后的面型云图如图9~11所示,为不同方向重力载荷下主镜面型云图。

图9 X向重力主镜面形云图

图10 Y向重力主镜面形云图
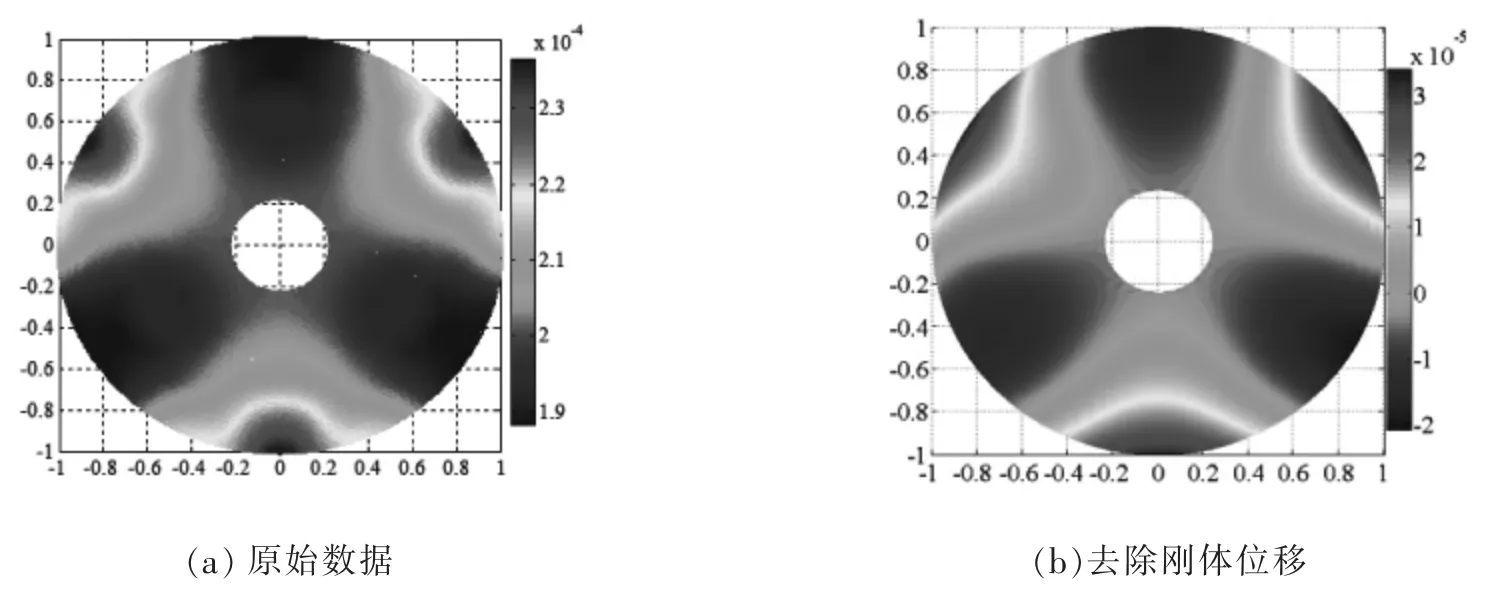
图11 Z向重力主镜面形云图
获得的主镜的面形精度及刚体位移参数如表1所示。

表1 主镜面形仿真结果表
设计望远镜主镜结构时,往往是以RMS值为指标。主镜组件在径向X、径向Y以及轴向Z方向上的RMS(含刚体位移)值分别为3.06 nm(0.004 8λ@632.8 nm)、4.94 nm(0.007 8λ@632.8 nm)以及11.3 nm(0.017 9λ@632.8 nm);RMS(不 含 刚 体 位 移)值 分 别 为2.57 nm(0.004λ@632.8 nm)、2.55 nm(0.004λ@632.8 nm)以及11 nm(0.019λ@632.8 nm);RMS优于λ/40(λ@632.8 nm)。可知光学元件由于不同外载荷产生的刚体位移对拟合面型拟合精度不同程度影响,必须去除刚体位移再进行Zernike多项式拟合面型。产生的刚体平动主要表现为重力方向的平移,在径向上的平移最大为0.4 μm;绕X轴和Y轴的倾斜数量级很小,可忽略。
2.2 主镜组件动力学分析
在火箭发射阶段,主镜光机组件承受着过大运载载荷,为了避免发射过程中出现塑性变形,造成失效,必须保证其具有高的动态特性,其模态分析如图12所示,为主镜光机组件前四阶约束模态振型图。
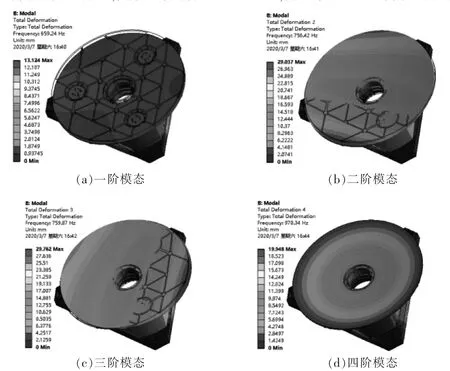
图12 主镜组件前四阶振型图
表2列出了主镜前四阶约束模态频率以及振型,可以得出,一阶基频为659.24 Hz,远远超过不低于200 Hz的设计指标,保证主镜组件在发射阶段不发生共振,满足运载火箭发射要求。

表2 主镜组件前四阶模态表
3 总结
本文基于SIC的背部三点支撑的超轻量化主镜结构模型,对主镜支撑结构进行详细设计,其中胶接件采用六点均布粘结,材料采用殷钢,重为0.23 kg×3;设计一种新型多轴复合柔性支撑结构,材料采用钛合金,重为0.3 kg×3;主镜背板采用铝基碳化硅材料,重仅为2.9 kg,一阶基频远超出500 Hz的设计要求;中心芯轴采用铝基碳化硅材料,重仅为0.18 kg。对主镜组件进行力学特性分析,结果表明:在径向重力X、Y以及轴向重力Z作用下,主镜面型RMS优于λ/40(λ@632.8 nm)。一阶基频为659.24 Hz,远超过不低于200 Hz的设计要求,为主镜组件结构设计提供了思路和参考。
4 感谢
感谢中国科学院合肥物质研究院大气光学重点实验室激光雷达研究室提供平台和数据支持。
