基于改进避障策略和双优化蚁群算法的机器人路径规划
2022-09-14张慧杰李志圣刘永磊
郝 琨 张慧杰 李志圣 刘永磊
(天津城建大学计算机与信息工程学院, 天津 300384)
0 引言
随着科技的发展,移动机器人已经被广泛应用于地面自主导航[1]、水下环境勘探[2]、应急信息采集[3]等领域中。路径规划技术是实现移动机器人智能化的关键技术之一,它是指移动机器人根据一种或多种性能指标,在复杂的空间环境中,寻找一条从起点到终点且没有碰撞的最优或次优路径[4-5]。目前移动机器人路径规划的主流算法分为两大类:传统算法与仿生学智能算法。其中,传统算法主要有A*算法、人工势场法等。智能算法主要有遗传算法、蚁群算法、粒子群算法、免疫算法等[6-8]。传统算法在简单的地图环境中性能较好,但不适用于复杂的地图环境中。而智能仿生学算法则存在过早收敛、易陷入局部极值等问题[9]。
蚁群算法具有良好的并行性和鲁棒性,因此被广泛地应用于路径规划领域[10-12]。但蚁群算法在路径规划领域也存在前期搜索盲目、收敛速度慢、容易陷入局部最优和死锁等问题。文献[13]利用人工势场法修改了蚁群算法的启发值参数,并提出了吸引素使蚁群算法更快收敛。文献[14]提出了一种基于合作博弈机制的多蚁群协同优化算法(CCACO)来加快算法的收敛速度,但该算法在大规模地图中运行效率低。文献[15]将人工势场法与蚁群算法相结合来提高算法后期的全局搜索能力。并采用基于运动路径的几何方法实现动态障碍物避障,但该算法不适合在未知环境下使用。文献[16]提出了一种改进蚁群算法(Improved ant colony algorithm,IACO)。该算法通过使初始信息素不均匀分布避免算法的早期盲目搜索,加快算法收敛速度,并利用动态惩罚方法减少蚂蚁陷入死锁的数量,但是该方法不能有效解决深度死锁问题。文献[17]提出了一种改进双层蚁群算法,将蚁群划分为引导层蚁群和普通层蚁群以应对不同的情况。然而,该算法将引导层蚁群与普通蚁群并行进行使引导层蚁群并未起到相应作用。
针对蚁群算法在路径规划中存在收敛速度慢、收敛路径质量低、死锁以及动态避障能力差的问题,本文提出基于改进避障策略和双优化蚁群算法(Double optimization ant colony algorithm,DOACO)的路径规划方法,该算法通过改进概率转移函数解决蚁群算法收敛速度慢的问题;通过回溯机制结合路径长度清零机制解决死锁问题;并通过路径优化与精英保存策略进一步提高收敛路径的质量;同时针对动态环境中的避障问题,提出一种避障行为与局部路径重规划相结合的避障策略。
1 空间环境模型
采用栅格法[18]建立空间环境模型,整个二维平面被划分为20×20大小一致的栅格,如图1所示。其中,白色栅格表示机器人可活动的自由区域,黑色栅格表示静态障碍物,红色栅格表示动态障碍物。黑色栅格和红色栅格所在区域均为机器人不可活动区域(即障碍物区域)。地图从左到右、从上到下由1开始为栅格添加编号直到添加至右下角的第400号栅格。环境地图中各栅格的坐标由其中心点坐标(x,y)表示,栅格编号与栅格坐标之间的转换式为

图1 20×20栅格地图Fig.1 20×20 grid map

(1)
y=n+0.5-ceil(m/n)
(2)
其中
m=floor(l-y)n+ceil(x)
(3)
式中m——栅格编号
n——栅格总列数
l——栅格总行数
(x,y)——栅格的横、纵坐标
式(1)、(2)把栅格编号转换成栅格坐标。式(3)把栅格坐标转换成栅格编号。mod()为取余函数,floor()为向下取整函数,ceil()为向上取整函数。
2 DOACO算法设计
2.1 DOACO算法
DOACO算法参数包括:起点栅格编号S,目标点栅格编号G,最大迭代次数Ncmax,当前迭代次数Nc,蚁群中蚂蚁的总数量K,当前蚂蚁数量k,信息素常量Q,信息素因子α,启发式因子β,信息素挥发因子ρ,伪随机概率调整因子q0。图2为DOACO算法流程图,算法流程如下:①对蚁群算法的各参数进行初始化。②令Nc=1。③令k=1。④将第k只蚂蚁放置在起点位置。⑤根据改进的概率转移公式选择下一个路径点。⑥判定蚂蚁是否陷入死锁状态,若陷入死锁,则采用死锁处理策略使得蚂蚁跳离死锁,然后转入步骤⑤;若未陷入死锁,则更新第k只蚂蚁的禁忌表,然后转入步骤⑦。⑦判断蚂蚁是否到达目标点,若未到达,转至步骤⑤;若已到达目标点,则转到步骤⑧。⑧判断该蚂蚁是否为当前迭代次数中的最后一只蚂蚁,若不是最后一只蚂蚁,则令k=k+1,然后返回步骤④;若是最后一只蚂蚁,则更新信息素并判断Nc>Ncmax是否成立,若不成立则转入步骤⑨,否则转入步骤⑩。⑨Nc=Nc+1,同时返回步骤③。⑩输出收敛路径,采用路径优化策略,得到最优路径,流程结束。

图2 DOACO算法流程图Fig.2 Flow chart of DOACO algorithm
2.2 伪随机概率转移
本文设计一种新的概率转移方法,通过引入伪随机概率调整因子q0来调整概率转移函数中对优质路径点的选择程度(式(4)),避免传统蚁群算法中选择优质路径点的概率过低这一问题(式(5))。
(4)
(5)

τij——路径点i和路径点j之间的信息素浓度
ηij——当前路径点i到路径点j的启发式信息
ak——当前路径点i的下一个可行路径点的集合
w——通过伪随机概率转移函数所获得的路径点

Roulette()——利用轮盘赌策略选取路径点的函数
q——随机数
q0通常为固定常数,当q≤q0时,保留最优邻居路径点。当q>q0时,利用传统概率转移方法和轮盘赌策略获得路径点。
在传统概率转移函数中,假设某优质路径点被选择的概率为p,此时引入伪随机转移概率因子q0,根据式(5),设伪随机概率转移函数对该优质路径点的选择概率为p1,则p1=q0+(1-q0)p,而p1-p=q0-pq0=q0(1-p)≥0,故p1≥p,即引入伪随机概率调整因子后,新函数中优质路径点被选择的程度大于传统概率转移函数。在已知p的情况下,新函数对优质路径点的选择程度取决于q0,因此,通过引入伪随机概率转移因子q0来调整优质路径点被选择的概率可行。
(6)
式中dij——路径点i和路径点j之间的距离
针对传统启发式信息的问题,本文设计了新的启发式信息函数,充分考虑下一节点到目标点的关系,强化启发式信息的引导作用,计算式为
(7)
式中djg——路径点j和目标点g之间的距离
在迭代前期,信息素对蚁群的引导作用较弱,启发式信息应发挥主导作用。此时信息素因子应较小,启发式因子应较大,强化启发式信息的主导作用。随着迭代次数的增加,各路径段上的信息素差异逐渐增大,信息素逐渐发挥主导作用。此时信息素因子逐渐增大,启发式因子逐渐减小,这样可以强化信息素的主导作用。基于上述分析,本文设计了自适应信息素因子α1、自适应启发式因子β1,以加快算法的收敛速度,计算式为
α1=[(Ncmax+Nc)/Ncmax]α
(8)
(9)
2.3 信息素初始化及更新
信息素初始化主要有两种方式:均匀分布和不均匀分布。初始信息素的不均匀分布[19-20]使算法有倾向性的快速收敛于某一条路径,当应对复杂地图环境时极易导致算法陷入局部最优解。而信息素均匀分布可以扩大算法对解空间的搜索范围,增强算法的种群多样性,降低算法陷入局部最优解的概率。因此本文采用初始信息素均匀分布的方法。
在信息素更新方面,DOACO仅考虑对每条路径上的信息素进行单次更新,不考虑二次更新[21-22]。信息素更新过程为
τij(t+1)=(1-ρ)τij(t)+Δτij(ρ∈(0,1))
(10)
其中

(11)
(12)
式中 Δτij——路径段(i,j)上的信息素增量

Lk——第k只蚂蚁所经过的路径长度
2.4 死锁问题处理策略
采取回溯机制和路径长度清零机制相结合的方法来解决蚁群算法的死锁问题[23]。假设当前蚂蚁行进到了第n个路径点且蚂蚁在第n个路径点处陷入死锁状态。则执行该方法流程如下:①令i=n。②将第i个路径点和第i-1个路径点之间的路径标记为不可行状态(即路径长度清零机制)。③蚂蚁返回到第i-1个路径点(即回溯机制),即i=i-1。④判断蚂蚁当前所在路径点是否陷入死锁现象。如果蚂蚁当前所在路径点陷入了死锁现象,则转入步骤②。如果蚂蚁当前所在路径点没有陷入死锁现象,则流程结束。蚂蚁根据概率转移函数选择下一个路径点。
该方法通过回溯并将路径长度清零重新调整蚂蚁寻路方向保证蚂蚁百分之百的存活率,提高蚂蚁对解空间的探索能力。
2.5 路径优化策略
DOACO算法在收敛路径的基础上对收敛路径进行了二次优化,从而进一步提高收敛路径的质量,路径优化策略如下:
(1)定义关键路径点的概念并找到一条收敛路径中关键路径点的集合。关键路径点是指可以支撑起一条路径中某一个路径段的核心路径点。包括:起点、目标点、特殊的路径点(多为路径转折处及障碍物附近的路径点)。
(2)利用启发式策略设计连接操作符。启发式策略是寻找当前路径点附近的距离目标点最近的相邻路径点。连接操作符是指利用启发式策略生成两个路径点之间的路径段的操作。
(3)利用连接操作符生成两个相邻关键路径点之间的新的路径段。
(4)若两个关键路径点之间的新的路径段比之前的路径段好,则用新的路径段取代旧的路径段。若两个关键路径点之间新的路径段比之前的路径段差,则不作改变。
假设某条路径中的第i个路径点是关键路径点,则该条路径中的下一个关键路径点的寻找方法如下:①令j=i,其中j为指针型变量,用作寻找关键路径点。②令j=j+1。③如果第j个路径点是终点,则第j个路径点就是下一个关键路径点,流程结束。否则,转入步骤④。④如果第i个路径点到第j个路径点之间的连线不经过障碍物栅格且第i个路径点到第j+1个路径点之间的连线经过障碍物栅格,则第j个路径点就是下一个关键路径点,流程结束。否则,转入步骤②。
本文使用二维栅格地图中的碰撞检测模型[24]来检测两个路径点之间的连线是否与障碍物栅格发生碰撞。
3 动态避障
针对传统避障策略存在的避障能力较差且实时性不足的问题[25-26],本文利用避障行为中的等待策略,并结合局部路径重规划的方法来进行动态避障。局部路径重规划方法是指当预测到移动机器人和动态障碍物即将碰撞时,利用启发式策略重新生成碰撞处的局部路径段的方法,该方法仅对全局路径进行小幅度调整。因此局部路径重规划方法具有避障代价小、避障实时性强、路径质量高的优点。
3.1 碰撞类型
按照不同的碰撞方式将碰撞类型分为正面碰撞、侧面碰撞以及障碍物停留在全局路径上的静态碰撞。其中,正面碰撞又分为接触式正面碰撞和非接触式正面碰撞。正面碰撞是指移动机器人与动态障碍物因运动方向共线且相反而产生的面对面碰撞的情况。假设移动机器人当前位置为ri(rix,riy),移动机器人下一个位置为ri+1(ri+1x,ri+1y)。动态障碍物当前位置为oi(oix,oiy),动态障碍物下一个位置为oi+1(oi+1x,oi+1y)。
若移动机器人与动态障碍物发生正面碰撞时有公共碰撞点,则这种碰撞情况被称为非接触式正面碰撞(图3a)。即

图3 碰撞类型示意图Fig.3 Schematic of collision types
(13)
若移动机器人与动态障碍物发生正面碰撞时没有公共碰撞点,即移动机器人与动态障碍物的下一步互为行进栅格。在这种情况下虽无碰撞点但两者也会发生碰撞,这时判断这种碰撞情况为接触式正面碰撞(图3b)。即
(14)
侧面碰撞是指移动机器人与动态障碍物运动方向不共线,但在某一时刻两者恰好产生公共碰撞点的情况(图3c)。即
(15)
障碍物停留在全局路径上的静态碰撞是指动态障碍物由于某种原因恰好停留在了全局路径上,导致移动机器人与障碍物必定会发生碰撞的情况。即
(16)
3.2 避障策略
本文提出的动态避障策略包含两种避障策略:原地等待策略和局部路径重规划策略。针对侧面碰撞,采取等待策略来避免碰撞的发生。即在侧面碰撞发生前,移动机器人原地暂停,等待动态障碍物通过后移动机器人再继续前进。
针对接触式正面碰撞、非接触式正面碰撞及障碍物停留在全局路径上的静态碰撞,采取局部路径重规划策略来避免碰撞的发生。假设移动机器人位于全局路径的第i个路径点,则把预测的公共碰撞点视为静态障碍物并利用启发式策略重新规划第i个路径点到第i+2个路径点之间的局部路径。当移动机器人沿着局部路径避过障碍物后,移动机器人将会重新返回全局路径。
4 仿真实验
4.1 仿真设计
为了验证DOACO算法的性能,本文将DOACO算法、ACO算法、IACO算法[16]分别运行在人工仿真的20×20栅格地图与自然环境仿真图书馆的50×50栅格地图下进行比较。20×20栅格地图环境为人为设置,而50×50栅格地图以真实图书馆环境为原型设置。评价指标包括:路径生成、路径长度、算法收敛所需的迭代次数、算法收敛所需的程序运行时间、蚂蚁存活率等。另外,通过在上述自然仿真的50×50地图中增加不同时间、不同方向出发的动态障碍物模拟图书馆中的学生来验证动态避障策略的有效性。
4.2 人工仿真实验
人工仿真实验使用20×20的栅格地图(图1),单位栅格长度设为1 m,移动机器人从1号栅格进入,从400号栅格离开。蚁群算法初始参数如表1所示。

表1 蚁群算法初始参数Tab.1 Parameters of ant colony algorithm
4.2.1路径生成
图4为ACO算法和IACO算法的机器人运动轨迹图。从图4a可看出,ACO算法生成路径的质量明显较差,而IACO算法生成的路径(图4b)质量有了一定的提高。图5为未添加优化策略的DOACO算法和添加优化策略的DOACO算法的机器人运动轨迹图。从图5a可看出,未添加优化策略的DOACO算法由于改进了启发信息等以及使用精英保存策略,生成路径的质量明显提高,但是该路径仍有进一步优化的空间。从图5b可看出,添加优化策略的DOACO算法生成路径的质量最好。实验结果表明,DOACO算法生成的路径明显优于ACO算法和IACO算法。

图4 机器人运动轨迹图Fig.4 Robot motion trajectory diagrams

图5 DOACO算法的机器人运动轨迹图Fig.5 Robot motion trajectory diagrams of DOACO algorithm
4.2.2收敛曲线分析
图6为3种算法的收敛曲线。从图6可看出ACO算法在108代收敛,收敛后的最优路径长度为37.8 m。IACO算法在41代收敛,收敛后的最优路径长度为37.56 m,该算法采用改进信息素的初始分布,因此收敛次数减少。而DOACO算法在15代就已经收敛,收敛后的最优路径长度为34.38 m。从收敛路径长度和收敛迭代次数来看,DOACO算法优于ACO算法和IACO算法,这主要是由于DOACO采用了路径优化策略以及改进的概率转移函数。此外,从图6中还可以发现,ACO算法和IACO算法均存在数据回落现象,而DOACO算法由于采用了精英保存策略,有效避免了数据回落现象。

图6 3种算法收敛曲线Fig.6 Comparison of convergence curves of three algorithms
4.2.3蚂蚁存活率分析
3种算法的蚂蚁存活率变化曲线如图7所示。从图7可以看出,在100代之前,随着迭代次数的增加,ACO算法的蚂蚁存活率呈逐渐上升趋势。在100代之后,ACO算法的蚂蚁存活率会有波动,但是总体上稳定。IACO算法则是在93代之前,随着迭代次数的增加,蚂蚁的存活率逐渐上升。到了93代之后,蚂蚁存活率达到1。这说明IACO算法的死锁惩罚因子起到了一定的效果。但是在算法迭代初期的时候,蚂蚁存活率依旧较低。而DOACO算法通过回溯机制保证了蚂蚁可以存活,路径长度清零机制引导蚂蚁调整前进方向跳离死锁,使蚂蚁存活率始终保持为1,从而有效解决死锁问题。

图7 3种算法蚂蚁存活率变化曲线Fig.7 Comparison of ant survival rate changes of three algorithms
4.2.4综合对比
在20×20栅格地图的仿真环境下,本文将每种算法各仿真20次取平均值,结果如表2所示。从表2可以看出,DOACO算法在平均路径长度、平均收敛迭代次数、平均算法收敛时间这3个性能指标上均优于ACO算法和IACO算法。算法收敛时间计算式为

表2 3种算法仿真结果Tab.2 Simulation results of three algorithms
(17)
式中T——整个程序的运行时间
Nc1——算法收敛时的迭代次数
t——算法收敛时的程序运行时间(即算法收敛时间)
本文将算法收敛时间作为衡量蚁群算法的时间尺度。如表2所示,在路径长度方面,DOACO算法得到的路径长度约为IACO算法的92.03%,ACO算法的91.40%,对路径长度有一定的缩减。在收敛迭代次数方面,DOACO算法收敛所用的迭代次数约为IACO算法的25.06%,ACO算法的16.45%,收敛次数大幅度减少,同时也使得平均算法收敛时间大大缩短,充分体现了DOACO算法的优越性。
4.3 自然环境仿真实验
自然仿真环境参照我校图书馆,实景图如图8a所示,图书馆面积为30 m×30 m,将整个地图划分为50×50栅格模型,每个栅格的实际面积为0.6 m×0.6 m。图8b为参考实际场景建立的地图模型,其中黑色障碍物代表图书馆中的墙壁、书架和桌子等不可行区域,红色障碍物代表图书馆中移动的行人。移动机器人从25号栅格进入,从2 449号栅格离开。蚁群算法的参数设计如表3所示。

表3 蚁群算法参数设计Tab.3 Parameters of ant colony algorithm

图8 图书馆实景与仿真环境Fig.8 Library real scene and simulation environment
4.3.1路径生成
图9为ACO算法和IACO算法在图书馆自然仿真环境下的机器人运动轨迹图。从图9a可以看出,ACO算法生成路径的质量明显较差。IACO算法生成路径(图9b)的质量甚至不如ACO算法。这充分说明在路径生成方面IACO算法并不适用于图书馆这类大规模多障碍物地图。图10为未添加优化策略的DOACO算法和添加优化策略的DOACO算法在图书馆地图下的机器人运动轨迹图。从图10a可以看出,未添加优化策略的DOACO算法生成路径的质量明显更好些,但是该路径仍有进一步优化的空间。从图10b可以看出,添加优化策略的DOACO算法生成路径的质量最优。实验结果所示,DOACO算法生成的路径明显优于ACO算法和IACO算法。
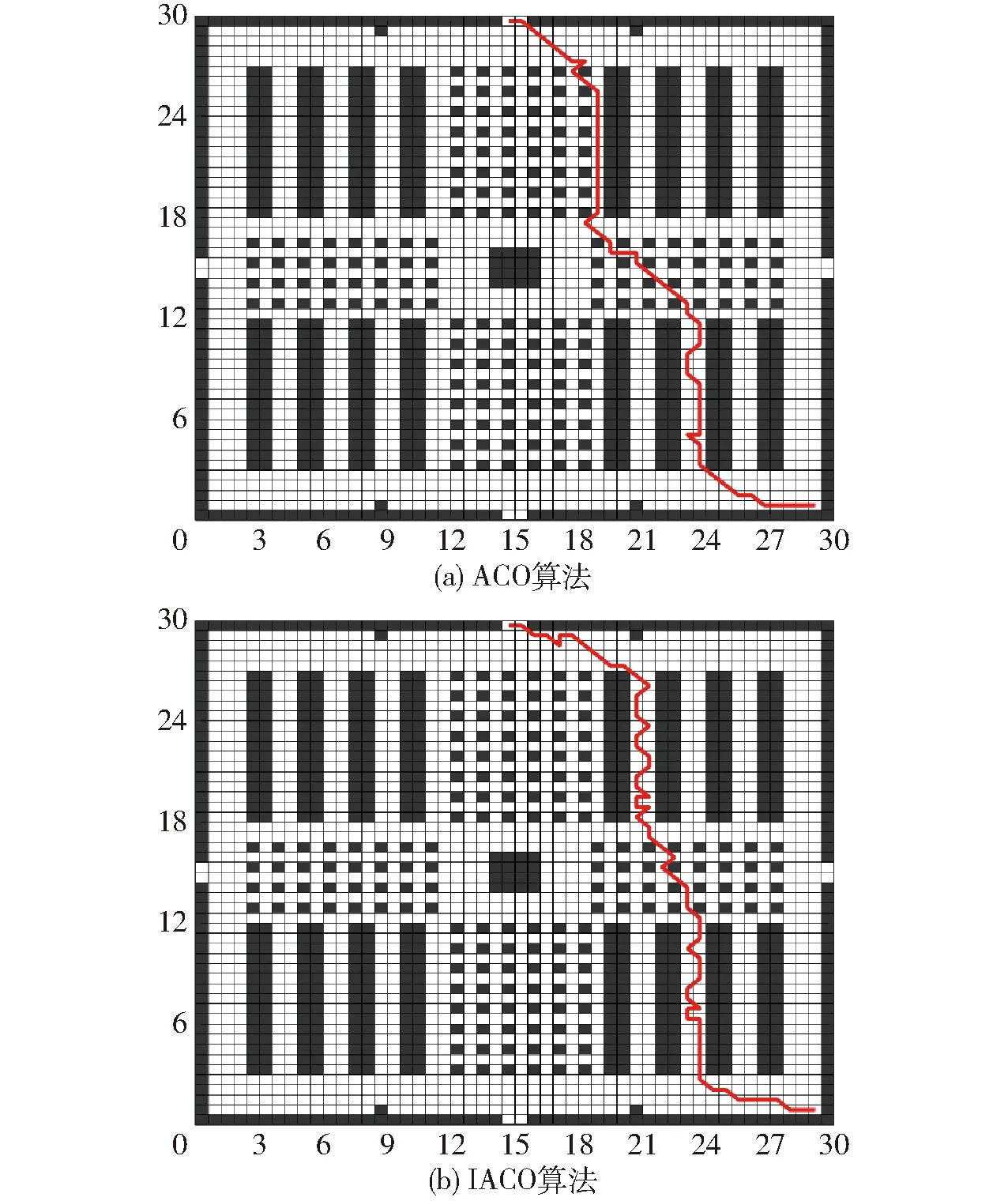
图9 图书馆地图下的机器人运动轨迹Fig.9 Robot motion trajectory diagram in library map

图10 DOACO算法在图书馆地图下的机器人运动轨迹Fig.10 Robot motion trajectory diagram of DOACO algorithm in library map
4.3.2收敛曲线分析
图11为3种算法收敛曲线。从图11可以看出,ACO算法在461代收敛,收敛后的最优路径长度为39.71 m。IACO算法在43代收敛,收敛后的最优路径长度为43.52 m。该算法主要通过改进信息素的初始分布使收敛次数减少,但同时也使算法更易陷入局部最优解,导致最优路径长度甚至不如ACO算法。而DOACO算法在25代就已经收敛,收敛后的最优路径长度为35.12 m。从收敛路径长度和收敛迭代次数来看,在图书馆仿真场景中,DOACO算法比ACO算法和IACO算法性能更优,充分展现了DOACO算法中路径优化策略以及改进的概率转移方法的科学性。此外,从图11中还可以发现ACO算法和IACO算法均存在数据回落现象,而DOACO算法由于采用了精英保存策略,有效避免了数据回落现象。

图11 3种算法图书馆地图收敛曲线对比Fig.11 Comparison of convergence curves of three algorithms in library map
4.3.3蚂蚁存活率分析
3种算法在图书馆地图下的蚂蚁存活率变化曲线如图12所示。从图12可以看出,在388代之前,随着迭代次数的增加,ACO算法的蚂蚁存活率呈逐渐上升趋势。在388代之后蚂蚁存活率达到1并维持稳定。文献[16]提出的IACO算法则是在245代蚂蚁存活率达到1。这说明IACO算法的死锁惩罚因子起到了一定的效果。但是在算法迭代初期时,蚂蚁存活率依旧较低。而本文提出的DOACO算法通过回溯机制保证了蚂蚁可以存活,路径长度清零机制引导蚂蚁调整前进方向跳离死锁,即使在实际场景较为复杂的地图下也依然可以保证蚂蚁的存活率始终为1,从而解决死锁问题。

图12 3种算法图书馆地图蚂蚁存活率对比Fig.12 Comparison of ant survival rate changes of three algorithms in library map
4.3.4综合对比
在图书馆仿真环境下,将每种算法各仿真20次取平均值,结果如表4所示。由表可知,DOACO算法在平均路径长度、平均收敛迭代次数、平均算法收敛时间这3个性能指标上均优于ACO算法和IACO算法。在路径长度方面,DOACO算法得到的路径长度约为IACO算法的81.25%,ACO算法的88.71%,对路径长度有了一定的缩减。在收敛迭代次数方面,DOACO算法收敛所用的迭代次数约为IACO算法的19.27%,ACO算法的5.23%。经实验验证,在自然环境仿真地图中DOACO算法的收敛次数大幅度减少,同时也使得平均算法收敛时间大大缩短,充分体现了DOACO算法的优越性。

表4 3种算法图书馆地图仿真结果Tab.4 Simulation results of three algorithms in library map
4.3.5动态避障
在基于图书馆地图50×50栅格(30 m×30 m)的仿真环境中,本文在完成静态全局路径规划的基础上添加了动态障碍物。实验共设置4个方向不同且出发时间不同的动态障碍物表示移动的行人,以此检验本文提出的避障策略的可行性和有效性。移动机器人动态避障的路径轨迹如图13所示。
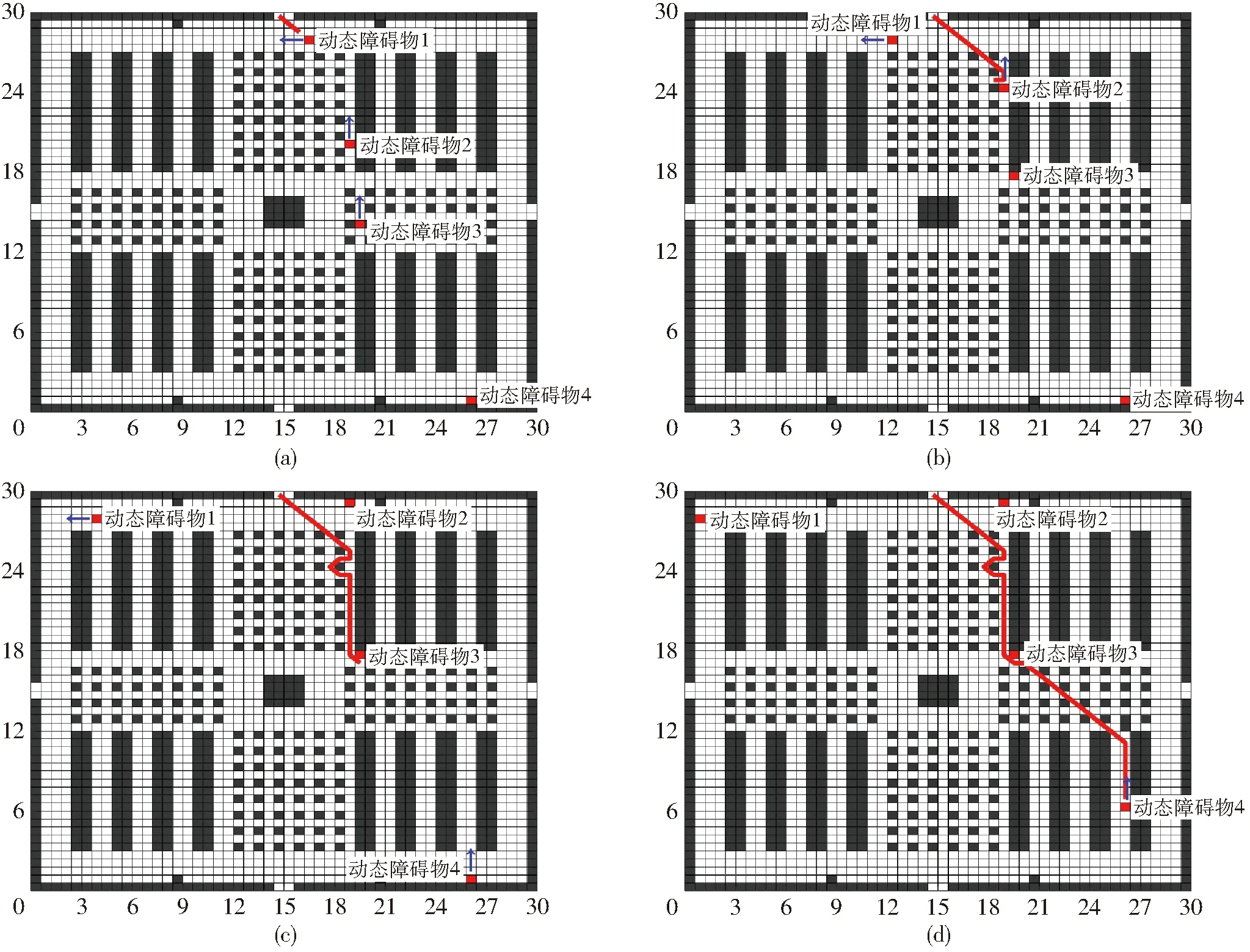
图13 图书馆仿真环境的动态避障轨迹图Fig.13 Dynamic obstacle avoidance trajectory diagram in library simulation environment
图13中动态障碍物1、2、3同时出发。动态障碍物行进速度均为每次一个单位长度。动态障碍物1由181号栅格向左行进,动态障碍物2由982号栅格向上行进,动态障碍物3由1 483号栅格向上行进。根据3.1节所述的碰撞类型检测机制,动态障碍物1在向左行进的过程中会与移动机器人发生侧面碰撞。碰撞点为178号栅格。根据3.2节的避障策略,移动机器人执行等待行为。即当移动机器人预测到碰撞后,移动机器人暂时停止行进,等待动态障碍物1通过后,移动机器人再继续前进(图13a)。
动态障碍物2、3在移动过程中分别与移动机器人发生非接触式正面碰撞、静态碰撞,碰撞点分别为482号栅格和1 033号栅格。根据3.2节的避障策略,移动机器人均执行局部路径重规划策略。即当移动机器人预测到碰撞后,重新规划当前路径点到碰撞点之后的下一路径点的路径(图13b、13c)。
动态障碍物4在移动机器人行进35步后开始运动,由2 444号栅格向上行进。当移动机器人行进至1 944号栅格时刚好与动态障碍物4正面相遇。根据3.1节所述的碰撞类型检测机制可以判断两者为接触式正面碰撞,故无碰撞点。根据3.2节的避障策略,移动机器人采用局部路径重新规划来避开障碍物。即移动机器人重新规划1 944号栅格到2 044号栅格之间的路径。移动机器人再按照重新规划的局部路径继续前进。避障完成后,移动机器人的运动轨迹如图13d所示。
为了测试本文提出的避障策略的实时性,仿真程序统计了4次避障所用时间。4次避障时间依次为0.000 179、0.009 581、0.000 600、0.015 197 s。而在DOACO算法的基础上用传统的避障策略,4次避障的避障时间依次为18.597 6、14.834 3、7.409 0、0.778 40 s。由此可见,本文提出的避障策略的实时性方面具有较好的性能。
5 结束语
提出了能够生成高质量全局路径的DOACO算法和适用于动态环境的避障策略,且适用于实际环境。首先,提出一种新的概率转移函数优化算法的收敛速度,解决蚁群算法收敛速度慢的问题。其次,采用精英保存策略并提出基于碰撞检测的路径优化策略对收敛路径再优化,提高收敛路径的质量。此外,本文采用回溯机制和路径长度清零机制相结合这一策略来解决蚁群算法的死锁问题。最后,设计一种新的避障策略,移动机器人根据不同的碰撞类型采用不同的避障策略来躲避动态障碍物。新的避障策略可以有效地解决常规避障策略实时性不足等问题。仿真结果表明,DOACO算法在静态和动态环境中均能生成可行有效的高质量路径,同时也能解决基本蚁群算法存在的问题。新的避障策略可以有效地应对各种潜在的碰撞情况并且避障实时性强。
