双发固定翼无人机的侧向大过载系统设计*
2022-08-30刘清成赵文龙高美妍谢琪琪陈正扬
吴 双,刘清成,朱 琦,王 涵,赵文龙,高美妍,谢琪琪,陈正扬
(1.上海工程技术大学,上海 201620;2.上海机电工程研究所,上海 201109)
对于给定布局的飞机,垂尾的设计通常是由方向舵的最大可用偏度决定的,应确保飞机机动能力合适[1]。水舵在滑行过程中主要承受水载荷的作用,水舵在水载荷作用下关系到飞机在水面滑行时的机动性和操纵性,偏航机动是由方向舵快速大幅偏转引起的侧向机动,机动过程中方向舵、垂尾上产生较大气动载荷并传递到后机身[2]。偏航机动是民用飞机载荷设计中非常重要的一种机动情况,是垂尾、后机身等部件载荷严重的情况之一,因此民用客机在方案设计中不能追求较大的过载[3-4],而无人军机为了战场的生存力,必须具有较大的机动能力。目前无人机更多地使用电能代替传统液压、气压和机械能,是先进飞机发展的方向[5],也是未来轻便察打一体机的发展方向。
本文的海空一体固定翼无人机综合考虑无人机电机位置的合理布局,采用了双电机差速设计,同时该机采用方向舵和水舵进行一体化设计,即当油门遥杆左上或者右上拨动,可以实现察打机的左加速转弯或者右加速转弯,从而在不损失较大速度的前提下,实现飞机的机动转弯,减小被武器系统摧毁的概率[6],增加海空一体固定翼无人机的生存力。
1 水平侧向扭矩过载模型
通过对海艇和空中固定翼飞机的分析,得出飞机海上初始机动仅仅依靠飞机的方向舵,转弯效率低,尤其在单电机推力情况下,而采用海上方向舵和空中方向舵一体化设计,增大了舵面积和舵效率,同时相对于传统单发固定翼无人机而言,通过新增左右2个电机,通过电路设计控制左右电机的差速运转,更有利于提高飞机的机动过载。飞机整体布局如图1所示。

图1 高机动海空固定翼无人机示意图
根据图1,当无人机水平急速规避时,可以建立差速电机的扭矩数学模型:

式(1)中:M1为差速电机的扭矩;F1和F2分别为左右电机拉力;L1和L2分别为左右电机力臂长度。
通常为了便于控制,可取L1=L2=L,因此式(1)可以简化为:

设飞机在空中飞行时,垂翼的面积为S1,方向舵面积设为S2,其中包括飞机的方向舵的面积S3和水舵的面积S4,即S2=S3+S4,因此包括方向舵和水舵的垂尾总面积S=S1+S3+S4,所以当方向舵和水舵的舵偏角度最大时,则仅采用一体化舵实现偏航的扭矩M2为:

式(2)中,F3为由于方向舵偏转而形成的侧力,其大小与侧力系数Cz、动压(q=0.5·ρ·v2)和一体化垂尾总面积S有关,F3=0.5·ρ·v2·Cz·S,所以M2可以表示为M2=0.5·ρ·v2·Cz·S·L3。
当一体化舵和差速电机同时作用时,围绕重心参考点的合成扭距M可表示为M=M1+M2=(F2-F1)·L+0.5·ρ·v2·Cz·S·L3。
2 无人机偏航扭矩仿真分析
根据样机的方案设计,样机质量为20 kg,展长最大为1.6 m,因此L可选择的最大值为0.8 m。当无人机仅依靠差速电机实现过载偏航时,单电机工作的过载效率最高,假设左转弯,则可设左电机拉力为0,则单发电机拉力扭矩M1与力臂L的关系仿真如图2所示。

图2 单发工作力臂L与扭矩M1的关系图
从图2可知,电机的力臂越长,电机所需拉力越小,但是当电机靠近展向最边界时,对飞行的稳定性以及结构设计不利,所以对于该低速无人机,可以选择力臂长为0.5 m,这样既可以满足平时双发正常飞行,又可以使单发过载达到15 Nm的扭矩。
当仅采用操纵一体化舵实现侧滑过载时,如控制方向舵左偏,则无人机将向右侧滑,飞机将左转弯,此时无人机受到的扭矩M2与由于方向舵偏转而形成的侧力F3和力臂L3都有关。根据方案,无人机速度v的范围为1~38 m/s,垂尾面S=0.2 m2,则无人机受到的扭矩M2和速度v的仿真示意图如图3所示。

图3 舵偏时扭矩M2与无人机速度v的关系图
从图3可以看出,无人机速度越大,侧向力越大,从而扭矩越大。当无人机达到最大速度38 m/s时,无人机受到的扭矩为18.4 Nm。
为了实现有效的水平转弯,需要恰当使用一体化方向舵和差速电机。主电机不同转速对应不同的动力,可以提供无人机平飞时的动力。为了说明无人机在不同的平飞速度下的机动,图4—图7分别给出无人机水平速度在10 m/s、20 m/s、30 m/s和38 m/s时,最大一体化方向舵偏角和单(左)电机不同拉力作用下的合成扭矩M与力臂L的关系图。
综合图4—图7可知,无人机的速度越大,双电机的差速拉力越大,可以实现的水平方向的扭矩越大,从而可以使无人机获得较大的水平偏转,减小被敌方炮火等摧毁的概率。
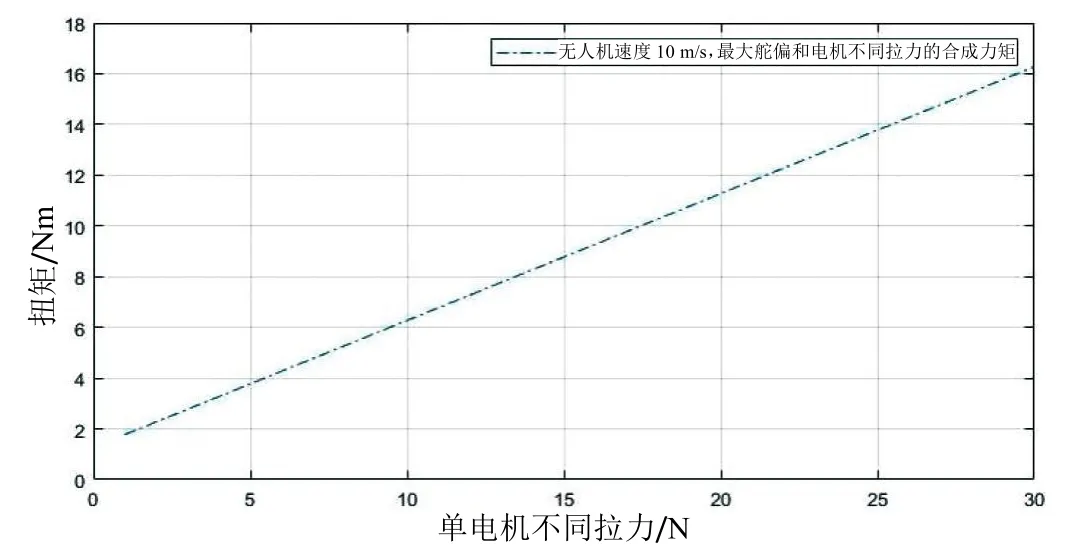
图4 最大舵偏(无人机速度10 m/s)和左电机不同拉力下的合成扭矩图
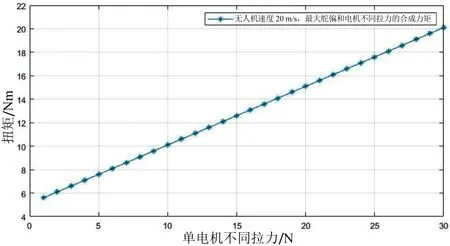
图5 最大舵偏(无人机速度20 m/s)和左电机不同拉力下的合成扭矩图
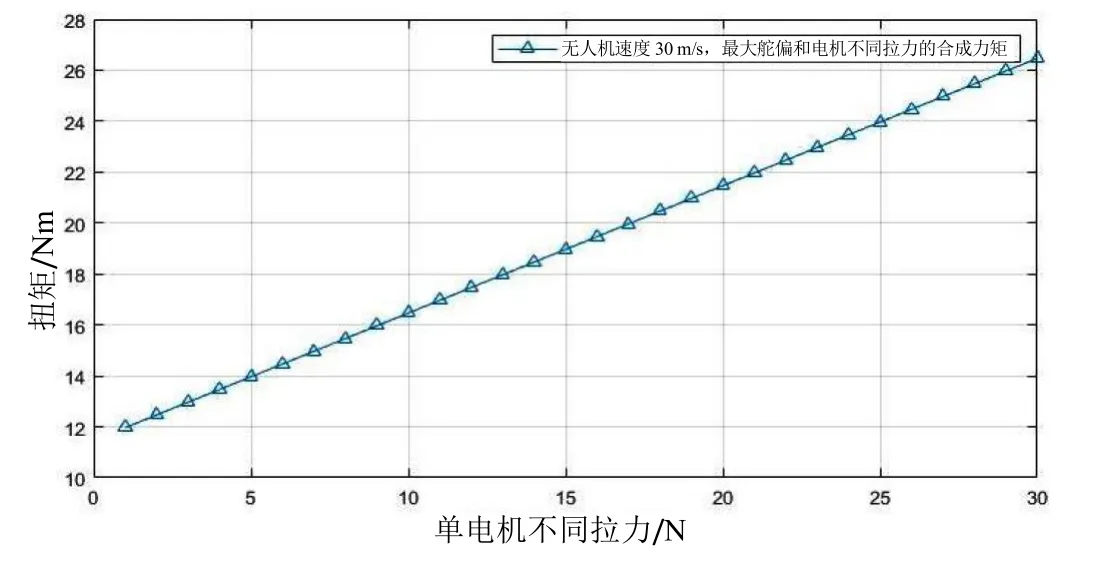
图6 最大舵偏(无人机速度30 m/s)和左电机不同拉力下的合成扭矩图

图7 最大舵偏(无人机速度38 m/s)和左电机不同拉力下的合成扭矩图
3 结论
针对目前海空固定翼飞行器机动性机动性小导致飞机容易被摧毁的弊端,在保留中心电机驱动的基础上,采用左右电机差速驱动以及方向舵和水舵一体化设计方案。仿真结果表明,无人机的速度越大,一体化方向舵偏角越大,同时双电机的差速拉力越大,可以实现的水平方向偏转扭矩也较大,从而可以满足海空两用固定翼无人机的快速高侧向机动的需求。
