基于KE和AHP理论的拖拉机驾驶室人机设计评价研究
2022-08-18李衍豪杨雪祝贺杨光辉
李衍豪 杨雪 祝贺 杨光辉
拖拉机驾驶室是驾驶员进行生产作业的主要场所,驾驶室内的人机设计对驾驶员的工作有着至关重要的影响。本文主要探讨在拖拉机驾驶室人机设计评价中,提出一种基于感性工学(Kansei Engineering,KE)和层次分析法(Analytic Hierarchy Process,AHP)相结合的人机设计评价模型,以更好地评价符合需求的拖拉机驾驶室人机设计。
一、拖拉机驾驶室人机设计评价模型的建立
感性工学的核心是通过对人的内在认知情感分析,将模糊的感性需求和情感意向通过数据地表达出来。
层次分析法多应用于多目标综合评价,通过定性与定量相结合分析,将复杂的评价的目标分解为目标层、准则层和指标层,通过每一层权重值的计算,得到最终评价结果。两种方法相结合能够使拖拉机驾驶室人机设计的综合评价更具科学性、合理性。
根据调研分析,拖拉机驾驶室的人机界面可以归纳为操纵系统、座椅系统、显示系统3 个典型的人机系统。
二、拖拉机驾驶室人机意象评价
(一)筛选代表性样本
收集能够体现驾驶室人机界面设计的图片,删去其中相近的样本,最终得到典型的拖拉机驾驶室人机设计样本12 个。
(二)拖拉机驾驶室人机界面意象词汇的获取
针对操纵系统、座椅系统、显示系统3 个人机界面,通过调查问卷、交流访谈、网上搜索等方式,最终得到12 组拖拉机驾驶室人机界面意象词汇,分别是:熟知的—陌生的;多元的—单一的;整体的—分散的;有序的—混乱的;舒适的—难受的;宽大的—窄小的;美观的—丑陋的;豪华的—廉价的;智能的—呆板的;清晰的—模糊的;明亮的—暗淡的;突出的—低调的。由此构建语义特征集。
(三)拖拉机驾驶室人机界面意象评价指标体系
将得到的拖拉机驾驶室人机界面意象词汇与拖拉机驾驶室人机设计样本相结合进行打分。评价分值1~5,分值越低越代表非常不符合,分值越高越代表非常符合,形成人机界面语义调查问卷。最终得到有效调查问卷共134 份。将数值统计到数据统计与分析软件中,进行统计。
分析的数据需要通过KMO 和Bartlett 检验。经验证,KMO 值为0.532,大于0.5,证明变量之间存在相关性;Bartlett 值接近于0,符合条件,通过检验。
运用主成分分析进行因子降维处理后,得到12组人机界面意象词汇成分矩阵和具体主成分数目。在成分矩阵中,要选择满足特征值大于1、累计方差贡献率大于80%这2 个标准的变量。同时成分系数值越高,对该变量的解释能力越强。经数据分析后按数值大小排序,成分1 中,整体的-分散的、有序的-混乱的、多元的-单一的,三个变量的系数较高;成分2 中,舒适的-难受的、豪华的-廉价的、宽大的-窄小的,三个变量的系数较高;成分3 中,清晰的-模糊的、明亮的-暗淡的、突出的-低调的,三个变量的系数较高。因此,我们确定这3 组9 个变量分别代表3 组人机界面。
根据层次分析法,构建以拖拉机驾驶室人机设计评价为目标层,以拖拉机驾驶室人机设计中的操纵系统、座椅系统、显示系统为准则层,以筛选出的人机界面意象词汇作为指标层,如图1 所示:
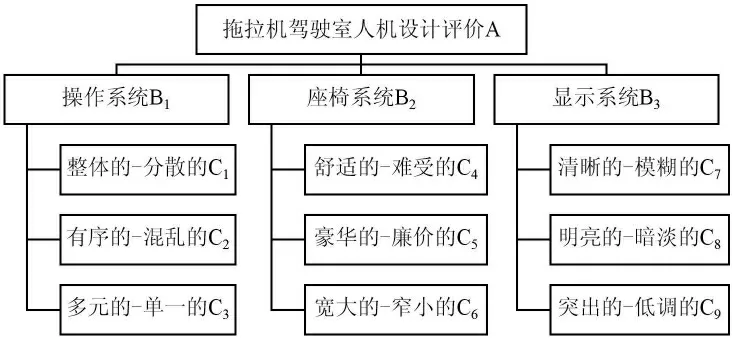
图1 拖拉机驾驶室人机设计评价指标体系
(四)评价指标权重的计算
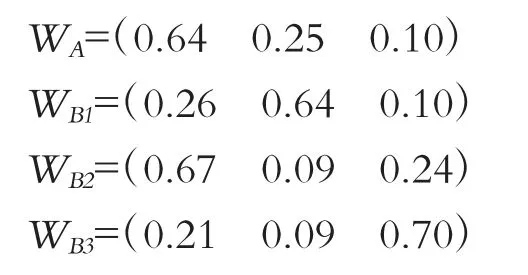
确定各个指标的权重是对拖拉机驾驶室人机设计评价的关键。邀请工业设计和农业机械老师共19名,采取九级标度法对各项指标进行打分,构建评价矩阵,再通过方根法计算各个指标的权重值。最终得到,B1-B3权重分别为0.63、0.26、0.11,C1-C3权重分 别 为0.26、0.64、0.10,C4-C6权 重 分 别 为0.67、0.09、0.24,C7-C9权重分别为0.26、0.10、0.64。
为保证专家评价小组在评价过程中的准确性和逻辑性,需要对结果进行一致性检验。
通过对目标层和准则层进行一致性检验,结果显示,各指标一致性比率CR≤0.1,说明评价矩阵通过了一致性检验,评价结果真实可靠。
(五)模糊综合评价
根据拖拉机驾驶室人机设计评价样本,样本如图2 所示。结合各项具体指标权重进行模糊综合评价。

图2 拖拉机驾驶室人机设计评价样本
确定5 个评价等级,分别为很好、好、较好、不好和差。对5 个评价等级根据5 级评价赋值标准,赋值向量β=(90 80 70 60 50)T,很好为90,好为80,比较好为70,不好为60,差为50。
通过各层级的评价指标权重确定各个指标权重向量。各层级的权重向量分别为:
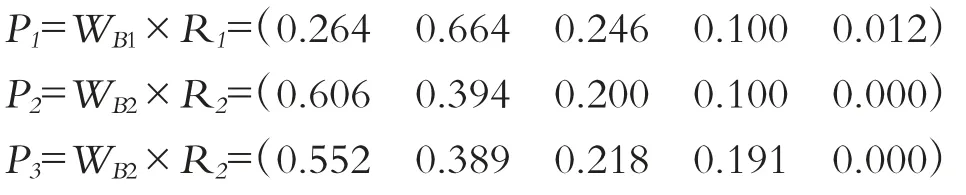
专家评价小组对子准则层中的各个指标按照评价等级标准进行评价,统计各个指标收到的评价次数。根据模糊综合评价矩阵,可计算出准则层对子准则层的评价权重向量Pi,即:Pi=WBi×Ri。
根据计算结果,建立二级评价矩阵P,并将得到的二级矩阵转制为百分制。从而直观地评判出不同拖拉机驾驶室人机设计的优劣差异。
邀请13 名农机企业专家对3 款不同的拖拉机驾驶室人机设计方案进行评价。以方案一为例,R1表示操纵系统评价指标B1层级下的各项具体指标的评价结果,R2表示座椅系统评价指标B2层级下的各项具体指标的评价结果,R3表示显示系统评价指标B3层级下的各项具体指标的评价结果,具体结果计算如下。

构建模糊综合评价矩阵后,计算评价权重向量Pi,计算结果如下。
将评价权重向量Pi构建为二级评价矩阵P,即:

根据二级评价矩阵,将方案一的评价结果转制为百分制数值。
综合评价权重向量W为:WA×P
方案一的百分制得分为:
W×β=(0.296 0.429 0.178 0.085 0.013)×(90 80 70 60 50)T=79.11
依照此方法得到方案二的百分制得分:
W×β=(0.286 0.437 0.180 0.090 0.006)×(90 80 70 60 50)T=79.06
方案三的百分制得分:
W×β=(0.386 0.392 0.193 0.020 0.006)×(90 80 70 60 50)T=81.26
根据最终得分可知方案三>方案一>方案二,由此可知方案三为最佳拖拉机驾驶室人机设计方案。
三、结论
将感性工学与层次分析法相结合,能够将用户的心理反应映射到产品设计中。针对国内目前缺少对拖拉机驾驶室总体人机设计评价体系,创新性的构建基于感性工学和层次分析法的拖拉机驾驶室人机设计评价模型,将模糊的拖拉机驾驶室人机设计语言通过数据明晰地表达出来,为今后拖拉机驾驶室人机设计提供一定的指导作用。