基于无模型自适应-模糊PI算法的全方位移动AGV设计与实现
2022-08-15王拓张星张冰玉
王拓,张星,张冰玉
(石家庄邮电职业技术学院,河北石家庄,050020)
0 前言
伴随着电子商务的飞速发展,作为传统劳动密集型行业的物流业,其规模正以每年40%的速度快速增长,一些电商开始投入巨资自建高科技物流系统,因此物流机器人技术得以迅速崛起[1]。
早期的物流机器人通常采用减速电机作为动力源,例如,文献[2]公开了一种物流机器人,采用传统减速电机结构,存在传动系统结构复杂的不足。直流无刷轮毂电机采用电机内装技术省略传动结构,提高了传动效率,简化了系统结构,大大降低了运行维护成本。文献[3]公开了一种采用轮毂电机的驱动的AGV,采用差速转向,车体与驱动轮之间采用刚性连接且无麦克纳姆轮设计受到非完整性约束,不能进行全方位移动。
麦克纳姆轮是一种常用的全方位移动轮,文献[4]公开了一种基于麦克纳姆轮的物流机器人车身结构,具有全方位移动能力。麦克纳姆轮AGV由于其驱动轮结构复杂存在以下不足:(1)由于麦克纳姆轮设置了周边轮轴,导致麦克纳姆轮的整体结构强度不高,并不适合大载重与颠簸的工作现场。(2)麦克纳姆轮结构复杂,在日常运行中毛发、沙粒都有可能卡住周轮轴,导致矢量力发生改变,导致AGV失控,因此装备麦克纳姆轮的AGV只适合无尘的工作场景。(3)麦克纳姆轮与地面的接触不连续,运动效率低,且存在侧向滑移问题[10]。
因此本文基于这些问题提出了一种新的AGV车体结构,采用轮毂电机驱动,克服了麦克纳姆轮侧向滑移和承载能力低的不足,且具备一定的全方位移动能力。
1 AGV实验平台的结构设计及建模
1.1 平台结构说明
AGV实验平台结构如图1所示。
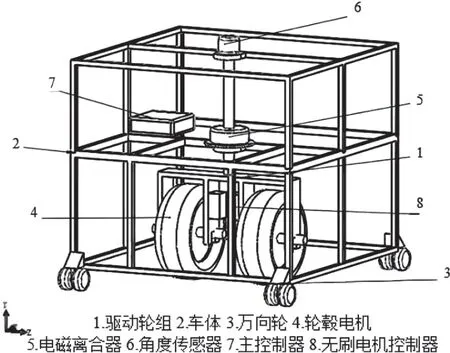
图1 AGV实验平台结构图
本文设计的AGV实验平台由两部分组成分别为:车体和驱动轮组。车体由车架和四个万向从动轮组成;驱动轮组由两个直流无刷轮毂电机、轮架以及转轴组成。
实验平台采用车体与驱动轮组分离的设计,运行中可以通过电磁离合器控制车体和驱动轮组的接合和分离,车体与驱动轮组分离时AGV通过双轮差速控制驱动轮组与车体间的相对角度,从而实现全方位移动。
1.2 实验平台数学分析
本文提出的实验平台采用的驱动方式如图2所示,万向轮起支撑作用,出于简化运算的目的,在计算中忽略万向轮的影响。

图2 AGV驱动方式示意图
使用该方案的AGV转弯半径可从0到无限大,可实现原地转向。
AGV的运动学模型如图3所示:W1、W2为AGV的驱动轮,D为二者之间的轮心距;VL、VR为左右驱动轮速度,二者的平均值Vc是AGV质心速度;θ为AGV行驶的方向角;Oc是AGV速度瞬心。

图3 AGV运动学模型图
由图3可知AGV质心C速度为VC其大小为:

设AGV车体角速度为ω,可得:

AGV的运动可被视为以Oc为圆心的的圆周运动,其半径R为:

差速AGV的运动状态有三种,由VL、VR之间的关系决定:
(1)当VL=VR时,VL=VR=VC,R=+∞,AGV做直线运动;
(2)当VL=-VR时,VC=0,R=0,AGV原地转向;
(3)当VL≠VR且当VL≠-VR时,VC=(VL+VR)/2,AGV做R=VC/ω=D(VL+VR)/2 (VL-VR)的圆弧运动。
将XOY平面设置为地平面,在其中对AGV的运行进行分析,可用向量(x,y,θ)表示AGV在大地坐标系中的位置与姿态,x、y表示AGV质心位置,θ表示其行进方向,可得AGV的运动学方程为式:
通过控制两直流无刷电机控制器的输入电压从而控制AGV线速度Vc和角速度ω在理论上可以实现AGV在任意位姿的运动。
2 无模型自适应控制器设计
由式(4)可得:

上式中Vk=VL-VR。
AGV以恒定速度运行,其质心速度为Vc,无模型自适应控制器通过控制驱动轮速度差Vk来控制θ来跟踪θ*。
由于无模型自适应方案仅需要利用受控系统输入输出数据,不需要对AGV建模,因此可直接给出对AGV差速方向控制系统的无模型自适应控制方案。笔者将AGV的差速转向系统转化为动态线性化数据模型如式(6)所示:
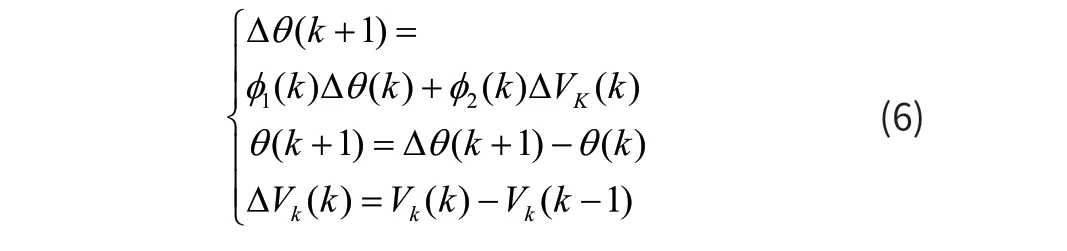
上式中φ1(k)和φ2(k)为系统的伪偏导数。
于是应用如下控制输入准则函数:

上式中λ>0是权重因子。
将式(6)带入式(7),对Vk(k)求导并使其值等于0,得控制率如下:

由于参数φ1(k)和φ2(k)未知。使用如下参数估计准则函数:
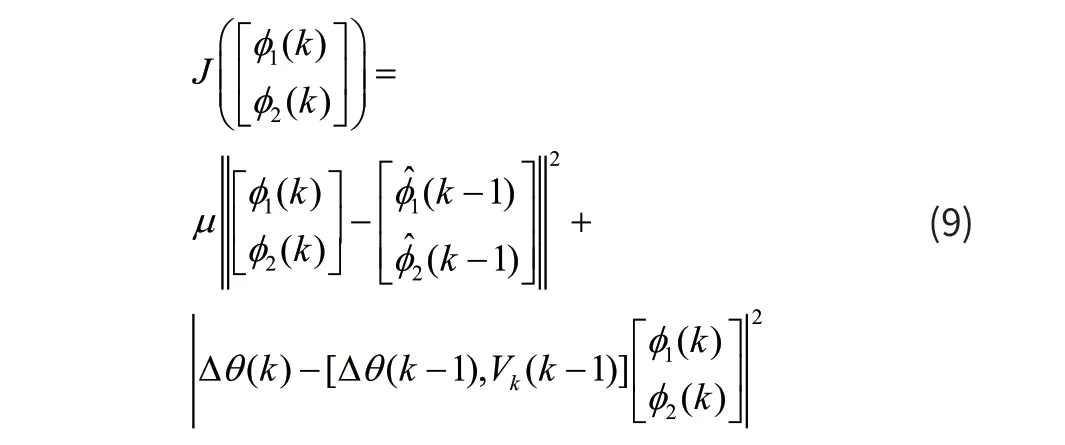
上式中μ为权重因子,1ˆ()kφ和 2ˆ()kφ为伪分块雅可比矩阵φ1(k)和φ2(k)的估计值。
根据最优条件,利用矩阵求逆引理,可给出φ1(k)和φ2(k)的估计算法如下:
将式(9)相对于φ1(k)和φ2(k)进行微分,并令其结果为零,参照式(8)进行处理,可得:

上式中η∈(0,2]为步长因子使式(10)更加灵活,μ>0是权重因子。
为了提高使参数估计算法跟踪时变参数的能力,应用如下参数重置算法:

上式中ε为给定的最小正数,和为和的初始值。
至此,得出AGV差速航向控制系统由式(8)式(10)式(11)确定。
3 无模型自适应和模糊PI复合控制算法的设计
AGV的实际运行过程中,航向与目标角度之间存在稳态误差[8]。因此引入PID算法的比例积分环节消除稳态误差。传统PID算法参数恒定并不适合对扰动的快速响应,因此引入模糊PI算法。模糊PI算法由模糊控制器和PI控制器两部分组成,模糊控制器的输入为误差e和误差变化率ec,利用模糊规则生成PI控制器的参数Kp、Ki的补偿量ΔKp、ΔKi,对PI参数进行自适应整定,基于此种操作大大提升了被控对象的动、静态性能。
本文模糊控制器的设计将输入与输出的论域划分为NB、NM、NS、ZO、PS、PM、PB七个语言变量,分别对应7个模糊子集:负大、负中、负小、零、正小、正中、正大。所得出的隶属度及相应隶属度的横坐标带入式(12)求出ΔKp、ΔKi。
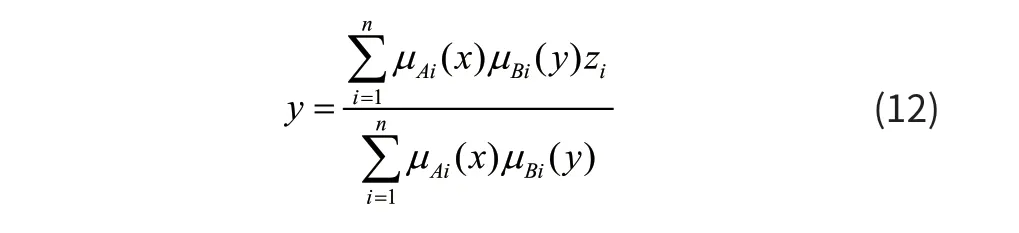
上式中μAi(x)、μBi(y)为隶属度,Zi为相应应隶属度的横坐标。
由Kp=Kp+ΔKp、Ki=Ki+ΔKi得 出 整 定后 的 参 数Kp、Ki,并带入PI控制器中运算。
PI控制控制器采用增量式算法,如式(13)所示:

上式中e(k)=θ*(k)-θ(k)。
无模型自适应模糊PI复合控制器控制框图如图4所示。

图4 无模型自适应-模糊PI复合算法控制框图
4 仿真与实验
基于前文设计的无模型自适应模糊PI控制器,建立了MATLAB仿真模型。Kp与Ki模糊规则表如表1、表2所示。

表1 Kp模糊规则表

表2 Ki模糊规则表

PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB PB PB ZO ZO PS PM PM PB PB
图5 为无模型自适应控制算法MATLAB仿真模型,图6为模糊PI控制算法MATLAB仿真模型图。

图5 无模型自适应仿真模型

图6 模糊PI仿真模型
无模型自适应模糊PI复合、无模型自适应、模糊PI三种控制算法的仿真结果对比如图7所示。通过单片机设定AGV车体质心速度Vc为0.5m/s,初始车身朝向θ=0度,给定航向为θ=30度。

图7 MATLAB仿真结果
相比于无模型自适应算法无模型自适应模糊PI复合算法控制精度高,相对于模糊PI算法无模型自适应模糊PI复合算法调节速度快,可发现无模型自适应模糊PI复合算法兼具无模型自适应算法调节速度快与模糊PI算法控制精度高的优点。
实车实验中为了可以在转向开始时自动记录数据,因此安装在AGV的轮组支架上安装了一个霍尔传感器,如图8(a)所示,传感器检测到磁性物质后如图8(b)所示,传感器的OUT引脚输出高电平,当控制核心检测到此高电平时AGV开始转向,并启动内置电子罗盘传感器开始数据记录。
实验开始首先在地面设置一个背磁胶条作为转向线,AGV先自行,途径转向线时开始转向,并通过电子罗盘分别采集使用无模型自适应、模糊PI、无模型自适应模糊PI复合三种控制算法对AGV进行控制。AGV启动后以0.5m/s直线速度稳定运行,当其抵达转向线时,霍尔传感器越过背胶磁条,向控制核心启动转向程序与电子罗盘,AGV以航向角a开始转向,当AGV航向稳定在a并保持 1s后,AGV停止行驶。将转向开始到停机时间减1s即为转向调节时间,实验如图8所示所示。
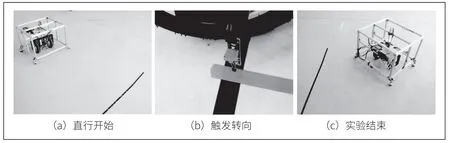
图8 直行转向实验
单片机定时读取电子罗盘数值,通过串口发送给上位机,统计结果如图9所示。
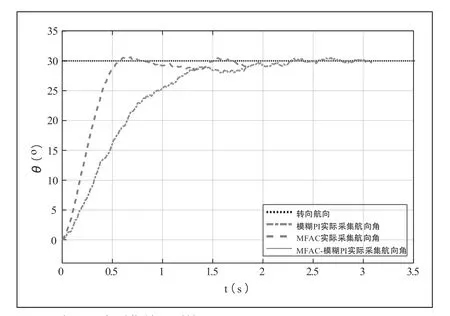
图9 电子罗盘采集结果对比
实际运行中由于摩擦力以及车架惯性扰动会导致曲线出现毛刺,误差在允许范围之内,因此不作处理,由图8可以发现无模型自适应模糊PI复合算法在调节速度方面优于模糊PI算法,在控制精度方面优于无模型自适应算法,且误差也在允许范围内,实现了差速方向控制稳定快速的控制意图。
5 结论
本文提出了一种改进的AGV车体结构,通过驱动轮组和车体分离的设计实现全方位移动,由于车体结构改变,传统的车辆模型无法胜任,重新建模工作量巨大。因此本文针对差速AGV航向控制, 提出了无模型自适应模糊PI复合控制方案,仅利用差速AGV航向控制系统的输入输出数据,无需模型信息,即可实现对AGV航向的控制。
无模型自适应模糊PI差速航向控制算法无需复杂设备,易于实现,可适用于差速AGV的航向控制、寻迹、纠偏,具有参数少、调节方便、适用于不确定性系统的优点。
在实际应用中,无模型自适应模糊PI复合控制属于数据驱动算法,对模型要求低,具有移植简便适应性强的特点。在AGV控制方面具有广阔的应用前景。
