基于RFID的轨道车辆定位测速系统的设计*
2022-08-12张辉波王一坚陈志刚黄莉娟
张辉波,王一坚,陈志刚,黄莉娟
(西南交通大学信息科学与技术学院,四川 成都 611756)
0 引言
轨道交通在人们的日常出行中扮演着越来越重要的角色,其安全运行离不开对车辆的位置与速度的实时监控。城市轨道交通通常采用的定位测速方法有轮轴光电计数,长定子齿槽检测,多普勒雷达,交叉感应回线,轨枕计数等技术[1]。随着科学技术的发展,特别是一些新型器件的出现,使得在轨道交通中对车体的定位测速有了更多的选择。射频识别(RFID)技术作为一种非接触式的通信方式,可以通过射频信号获取目标对象里预先存储的信息,进而达到识别目标的目的[2],现已广泛用于与人们生活息息相关的许多领域。而对于路径固定的轨道交通车辆,采用RFID的定位技术具有性价比高,研发周期短,使用灵活等优点[3-4]。基于RFID技术的优势,本文提出一种应用于轨道车辆的射频识别定位测速系统。介绍了RFID定位测速原理,系统构建方案及软件设计流程,在室外开展的相关实验测试结果验证了本系统定位测速的有效性。
1 RFID定位测速原理
限于电路响应时间、读写器识别速度等因素,RFID系统适用于对中低速运动车体的定位测速。通过读写器可将位置信息预先写入无源电子标签。根据位置信息,将标签放置在路径的相应位置。车载读写器经过标签时,可读取其数据并将实时位置信息传输至显示终端。采用时差法可计算车体在两个标签间的平均运动速度。其工作原理如图1所示。
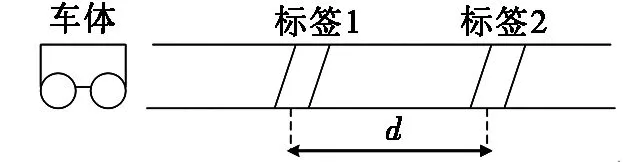
图1 对车体定位测速的原理图

(1)
2 系统总体方案
本设计由RFID读写器、RFID标签、STM32单片机开发系统、接口转换电路、电源、液晶显示终端组成,系统由移动电源进行供电,其整体结构如图2所示。上电后,STM32通过串口向读写器发送16进制的初始化配置命令,待收到初始化成功的响应后,读写器将工作在定时模式,开始主动搜索标签,搜索到电子标签后,将以数据帧的形式把数据发送给STM32。STM32则将接收到的标签信息处理后,发送至液晶显示终端。
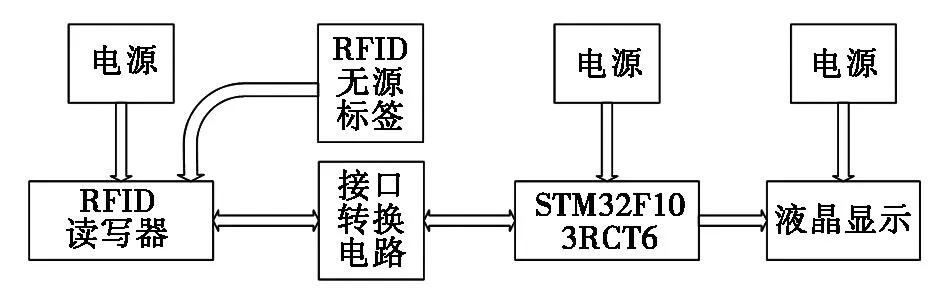
图2 车体定位测速系统的结构框架图
2.1 RFID系统
本设计所采用的RFID读写器型号为HR1907Q。这是一款自带嵌入式微操作系统的多功能超高频读写器,其工作频率为902~928 MHz/865~868 MHz,输出功率为0~30 dBm,读取距离最远可达7 m,工作功耗仅为5 W,工作电压为9~24 V。该读写器带多种通信接口,支持多种通信协议,易于进行二次开发。它每次可向串口发送长度为25个字节的数据帧,而对应的标签支持12个字节的数据存储。本设计的适用范围为中短距离固定路径,标签数目为12,因此标签中存储的信息足以包含标签编号、信号强度(RSSI)和相对距离。
为测试此读写器的读取速度,通过上位机对其获得的时间相关的数据帧信息进行分析,如图3所示。可以发现,两个相邻数据帧的时间戳间隔平均值约为30 ms,因此在系统搭建时需要考虑车速过快可能导致的标签漏读因素。
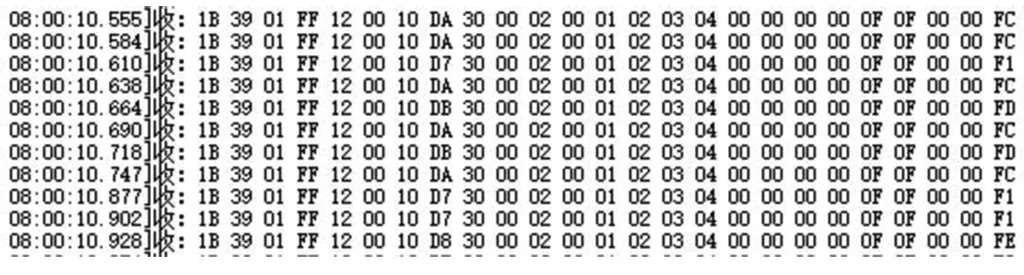
图3 读写器读取的数据帧
2.2 STM32单片机开发系统
本设计所使用到的STM32单片机系统为ALIENTEK MiniSTM32开发板,其板载MCU为STM32F103RCT6。此微处理器有64个I/O口,256 k的Flash内存,设计中只需要用到其中两个串口。系统的时钟频率为8 MHz,满足设计需求。
2.3 接口转换模块
由于本设计采用的RFID读写器HR1907Q的通信接口为RS232,而STM32单片机开发系统所使用的接口为串口,因此需要采用RS232-TTL的接口转换模块将它们连接。
3 系统软件设计
定位测速系统的软件设计部分主要由位置提取模块、速度计算模块、显示界面模块组成,其主程序流程图如图4所示。系统完成初始化以后,进行液晶屏显示界面的更新。当检测到标签信息时,STM32将从所获得的数据帧中提取标签编号及位置信息,把16进制的位置数据转化成10进制,传输至液晶屏显示。在得到第一个标签信息的同时,开启定时器进行计时。当再次得到标签信号时,首先判断是否与上一个标签相同,如果为新标签,STM32将停止定时器,并存储定时器的时间数据,即车体在两个标签间的运动时间,进而计算车体在两个标签间的平均速度,同时将定时器清零,开始下一次计时。以此循环,除了经过第一个标签时无法得到车速信息外,在经过其它标签时均会得到不断刷新的车体的速度值。其数据将被转化为“m/s”、“km/h”两种模式的数据,并被传输到液晶屏显示。
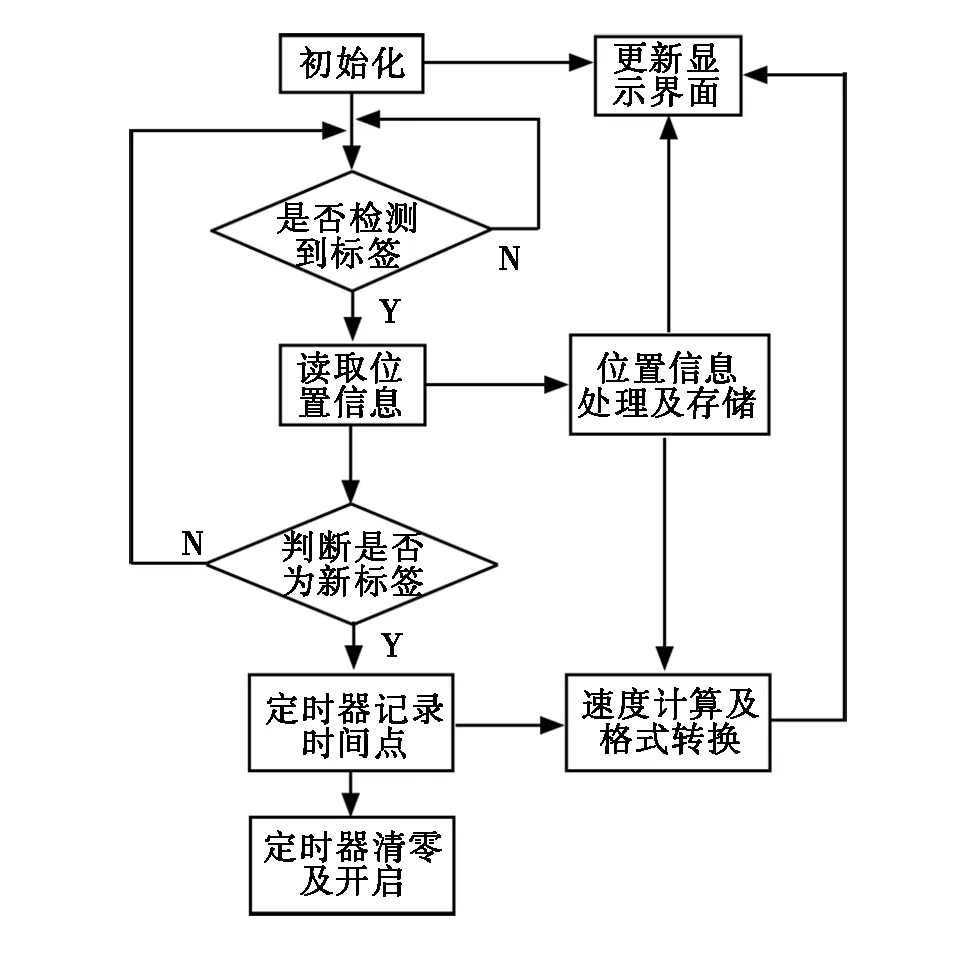
图4 主程序流程图
4 实验及结果分析
为了对所研制系统的定位测速性能进行评测,在一块空旷的场地搭建了实验平台并开展相关测试工作。实验模拟轨道车辆路径固定的特点,将一辆汽车作为测试对象,并在测试区域内,使汽车的行驶路径近似为一条直线。
为了选择合适的读写器天线的发射功率,首先对读写器垂直方向上的识别距离和发射功率之间的关系进行测试,其结果如表1所示。考虑到实际测试时标签和读写器的距离为1 m以内,选择16 dBm为发射功率。
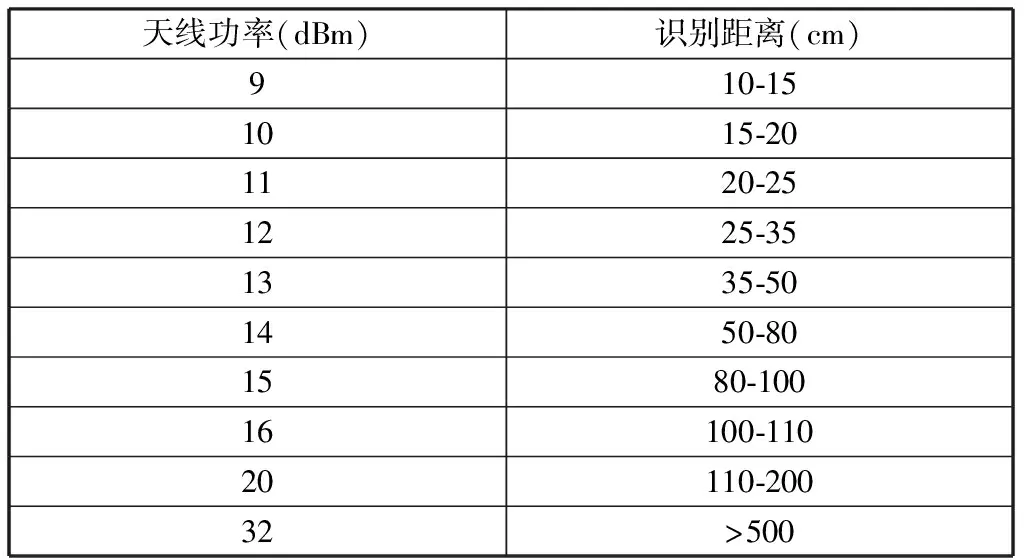
表1 HR1907Q发射功率和识别距离关系
在此发射功率下,对不同角度、不同距离的标签RSSI进行测试。结果表明,在标签距读写器超过50 cm,偏离读写器轴心60°时,读写器无法识别到标签。同时,为了保证车体经过时车载读卡器能够识别标签,需将车速控制在一定范围内。经过估算,在理想情况下,车速的上限理论值约为104 km/h,符合本设计的速度需求。
无源电子标签按照所写入的位置信息以一定的间隔按直线放置在路旁的标志物上。为了避免两个标签同时被读写器识别的情况发生,相邻两个标签之间的距离为5 m以上。在实验中需避免附近有与RFID系统工作频率接近的信号干扰。
实际测试中,汽车先在测量区间外完成启动并提速,然后尽量以匀速且和标签始终保持一个相对稳定距离的方式通过测试区间。通过液晶屏上的标签编号及位置信息,可判断当前的实时位置及标签是否漏读。将汽车仪表盘上显示的速度和液晶屏上的速度进行对比,可评价实测速度的精确性。限于场地面积,车速最高为50 km/h。经过调试,系统可正常工作,不会出现漏读标签的现象。图5为在以约30 km/h的车速进行的测试过程中某时刻的结果。可以看出,系统可显示标签编号、信号强度、实时相对位置和速度信息,其速度值与仪表板显示速度基本吻合。
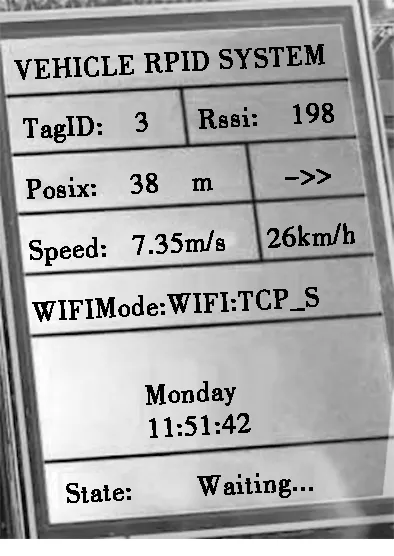
图5 液晶屏显示结果
5 结语
设计了一种以STM32为控制核心的射频识别定位测速系统。通过实验表明,该系统能对在固定路径上以50 km/h以下速度行驶的车辆进行实时定位及较为精准的速度计算。对系统进一步的研发包括数据的无线传输和上位机的开发,使其实用性更强,从而为中低速轨道交通的控制系统设计提供一些参考。