基于双目视觉的L型板几何参数测量研究
2022-08-10周海宇刘兴德蔚芳鑫卢添烨刁建超
周海宇,刘兴德,蔚芳鑫,卢添烨,刁建超
(1.吉林化工学院 信息与控制工程学院,吉林 吉林 132022;2.吉林化工学院 机电工程学院,吉林 吉林 132022)
目前,视觉识别测量技术广泛应用于工件的几何参数识别中.作为一种非接触式测量技术[1],采集速度快和识别精度较高,大大减少人为因素对测量结果产生的误差,在测量领域发挥着举足轻重的作用.L型板作为汽车装配夹具中的支撑部件,不仅规格多、需求量大,而且对搭接与焊接精度有一定要求,传统人工筛选与焊接不能满足现代化生产加工,视觉识别测量就显得尤为重要.
双目立体视觉是机器视觉的一种重要形式[2].双目立体视觉仿照人类双眼的工作原理,主要由两个型号相同的相机、镜头、光源以及视觉控制系统搭建而成,同一时间内对待测目标进行数字图像获取,并基于视差原理建立待测目标在两幅图像中对应的特征关系,通过特征点的位置偏差获取待测目标的三维信息[3].文章基于双目视觉模型对L型板的几何参数进行获取.首先对双目相机标定,得到左右相机的内、外参数,然后用Sobel边缘检测算法进行边缘提取,最后利用三角测量原理提取特征点三维坐标,计算出L型板的几何参数.
1 双目视觉测量原理
双目立体视觉利用两台相机分别对同一个待测物体进行拍摄,利用三角测量原理来获取待测物体的三维坐标.双目视觉测量原理如图1所示.
从图1可知,待测量目标点为P点;XLOLYL和XrOrYr分别是两个相机所在位置的坐标系;P1和P2点分别为待测点P在两个相机图像坐标系上的投影点.
要明确世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系,才能够测得待测点的实际三维坐标[4].四者关系如图2所示.

图2 坐标系转换
首先,需要知道图像坐标系和像素坐标系之间的相互转化关系,其表达式如下:
(1)
其中,(u,v,1)为投影点在像素坐标系上的齐次坐标,单位为pixel;(x,y,1)为投影点在图像坐标系上的齐次坐标,单位为mm;(u0,v0)为相机光轴在像素坐标系上的位置坐标;dy与dx分别为每个像素在纵轴y和横轴x上的物理尺寸.
其次,相机坐标系与图像坐标系之间的透视投影关系就是小孔成像原理,其用矩阵形式表达如下:
(2)
其中,(xca,yca,zca,1)为待测点目标点P在相机坐标系上的齐次坐标,单位为m;f为相机等效焦距.空间中的被测物体决定相机的摆放位置,引入世界坐标系作为基准坐标系.因为世界坐标系和摄像机坐标都是左手坐标系,所以其不会发生形变[5].而在保证不会发生形变的情况下,刚体变换能够确定两种坐标系之间的关系,即通过旋转矩阵R和平移矩阵t实现,其表达式为:
(3)
其中,(xwo,ywo,zwo,1) 是P点在世界坐标系下的齐次坐标,单位为m;R为3×3的旋转矩阵;t为三维平移列向量.
将式(1)、(2)、(3)联立,即可得到待测目标点在世界坐标系和像素坐标系之间的相互转换关系,转换表达式如下:
Mip·Mep·Xw=M·Xwo,
(4)
其中,Mip为相机的内部参数矩阵,由f/dx、f/dy、u0、v0共同决定;Mep为相机的外部参数矩阵,由旋转矩阵R和平移矩阵t决定;Xwo为带测点在世界坐标系下的齐次坐标;M为3×4的投影矩阵,由内部参数矩阵Mip和外部参数矩阵Mep相乘得到.
由于本系统是双目视觉,待测点P分别在左右相机上的投影点为PL、PR,其投影转换关系为:
(5)
(6)
将(5)、(6)式中各自的zcL和zcR消去,得到的线性表达式为:

(7)
(8)
将式(7)和(8)联立,便可求得待测目标点P的三维坐标(xwo,ywo,zwo).
2 相机标定
相机标定是获取图像三维信息的重要环节.常用的标定法可见表1.

表1 标定方法
张正友相机标定法,是一种应用广泛的标定方法[6].该标定法介于传统标定法和自标定法之间,使用打印的平面棋盘格,并采集多幅图像进行标定,既克服了传统标定法标定物精度要求高的缺点,相比较自标定法来说,也提高了精度,便于操作,鲁棒性、可行性和实用性好[7].因此张正有相机标定法被广泛应用于相机标定过程中.
本次实验采用海康公司的相机进行标定与测量,硬件选型可见表2.
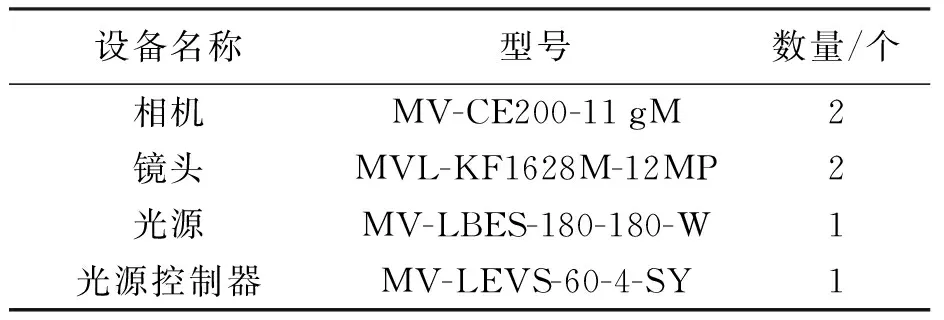
表2 硬件选型
左右相机同时采集18组不同姿态的棋盘格图片,然后对相机进行标定,标定得到相机的内部参数与旋转、平移矩阵.标定结果可如下展示.
左相机的内部参数矩阵为:
右相机的内部参数矩阵为:
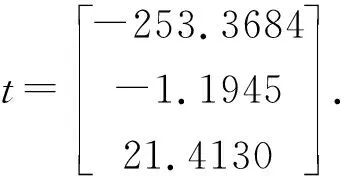
旋转矩阵和平移矩阵分别为:

3 测量与分析
实际测量的工件为待焊接的L型板,待焊接的L型板由底板、背板、肋板3部分组成,待焊接的L型板三维模型如图3(a)所示.

(a)L型板三维模型

(b)L型板实际待测点图3 L型板
本次测量的内容是对L型板边缘几何参数以及3条焊缝长度的测量,焊缝的识别测量是本次研究的重点.L型板待测点如图3(b)所示.其中,AB点距离为背板长度,DE点、DF点、CD点距离分别是3条焊缝的长度.由于待测量特征点位于实际拍摄图像中上方位置,可以获取这些特征点进行三维坐标,从而得到L型板的几何参数.
3.1 边缘检测方法的选择
相机拍摄到的照片,不能直接用于获取图像特征点信息,因为图像的对比度、噪声、特征点样本分布不均匀等因素影响成像质量,需要对图像进行预处理才能得到理想的图像特征信息[8].例如,图像信息中存在大量噪声,这些噪声会影响我们对图像的信息判断,所以在消除噪声的同时,最大程度保留图像轮廓与边缘信息对后续图像处理有重大作用.
边缘检测的原理是检测相邻的几个点像素值之间的变化率,相当于对图像强度函数求导[9].常用的边缘检测算法有:Roberts边缘检测算法、Sobel边缘检测算法、Prewitt边缘检测算法与Canny边缘检测算法.其中,Canny边缘检测算法不容易受噪声影响,通过对上、下限阈值的设置能有效检测出弱边缘[10].但是该检测算法必须设置合适的上、下限阈值,才能对图像进行边缘检测,而且对于其他图像必须重新设置阈值,在操作过程中增大了工作量与实验难度.Canny算法对L型板的边缘检测效果如图4(a)所示.
(a)Canny检测效果

(b)Sobel检测效果图4 边缘检测
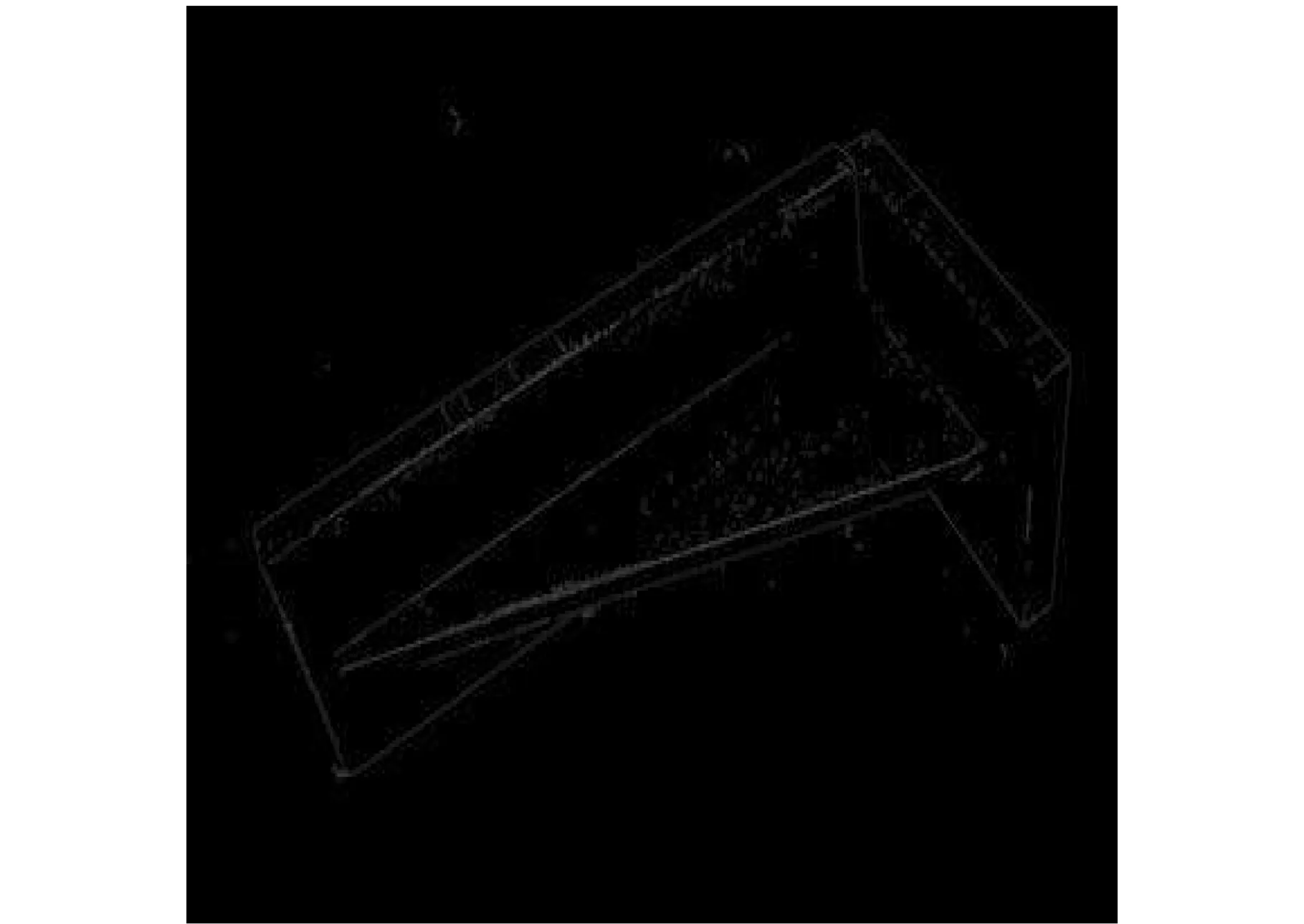
Sobel算法是通过离散微分方法求取图像边缘的边缘检测算法[11].相比较其他算法,Sobel算法简单而快速,可以对图像进行水平方向检测或竖直方向检测,也可以两个方向都检测,提高了算法灵活性,而且对规则工件进行边缘检测时,Sobel边缘检测算法更加适用.Sobel算法对L型板的边缘效果如图4(b)所示.
其中,从图4(a)Canny检测效果来看,由于被检测件表面存在锈蚀和加工纹理,图像滤波去除噪声的同时,也会丢失一部分关键特征点,造成图像边缘不连续,为后续的坐标测量带来麻烦;从图4(b)Sobel检测效果来看,外围边缘较清晰,内部焊缝区域也能得到很好地识别,所以采用Sobel算法对L型板图像进行边缘检测.
3.2 坐标测量
选择Sobel算法对L型板的检测效果图进行坐标获取,其坐标值可见表3.
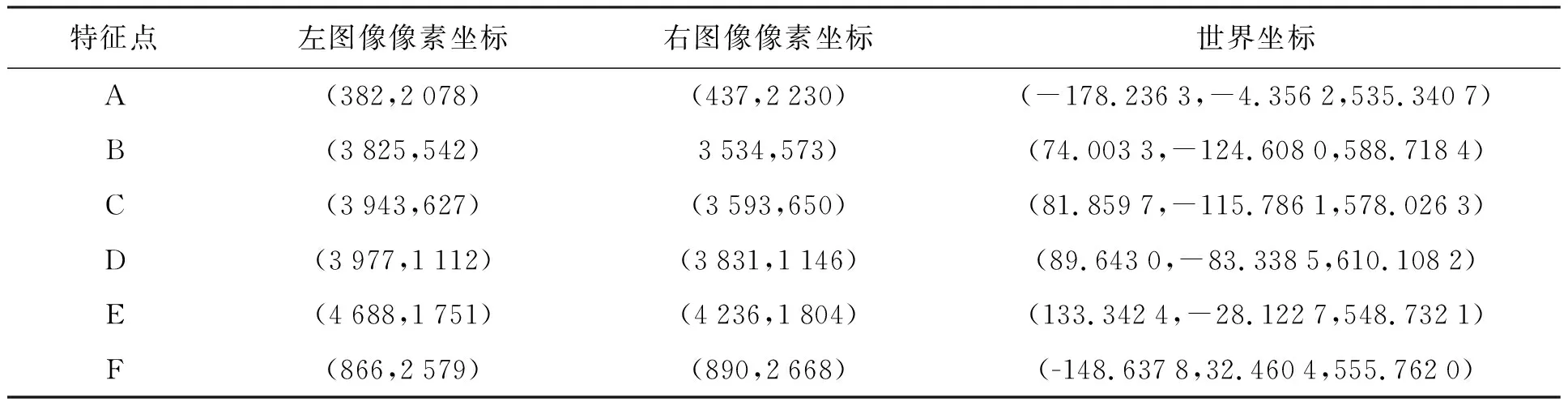
表3 特征点坐标
得到特征点的世界坐标后,就可以求得两个特征点之间的实验长度,并与实际长度进行对比,判断实验数据是否满足本次研究需要.其中L型板背板边缘长度对比可见表4.L型板焊缝长度对比可见表5.

表4 L型板背板边缘长度对比

表5 L型板焊缝长度对比
L型板按背板长度分为200、250和300 mm 3种类型,通过视觉测量背板边缘长度,确定L型板型号.由表4可知,AB点之间的实验长度为284.489 899 mm,即L型板背板边缘实验长度,与实际长度之间的误差为-0.810 101 mm,误差率为0.28%,所以在误差允许的情况下,对于其他型号的L型板,同样适用,可以确定出L型板类型.
由表5可知,3条L型板焊缝实际长度与实验长度最大误差为DF之间的距离(-0.454 779),最小误差为CD点之间的距离(-0.070 873),对DE焊缝来说,误差为+0.450 057 mm,与DF点之间的误差相差不多,但是误差率高于DF点,这是由于左右相机对DE点之间焊缝采集信息少于DF,特征信息不完整造成的.对于L型板焊接工艺,采用焊丝直径为Φ1.2 mm,焊缝实验测量误差小于0.6 mm即可满足焊接要求.
虽然实验测得的背板边缘长度和焊缝长度能够满足实验要求,但是实验结果存在一定误差,主要原因有:一是图像处理存在缺陷,不能保证同一个特征点在两台相机上的坐标是相互对应的;二是标定板采用打印的棋盘格,打印误差会给左右相机的内、外参数造成影响;三是两台相机虽然是同一种型号,但是不能保证性能完全相同.
4 结 论
本文基于双目视觉模型对L型板几何参数进行测量,获取L型板背板边缘长度与焊缝长度数据.实验测得背板边缘长度误差率小于0.5%,焊缝长度最大误差率为0.48%.实验数据表明,该测量算法简单,图像边缘信息较为完整,能够识别L型板类型和测量出焊缝长度,并满足基于工业机器人的复杂角焊缝智能船形焊接技术研究与应用项目关于图像信息获取的要求.
利用该算法测得数据还存在一定误差,可以对图像处理算法进一步优化,减少相机标定过程中人为因素对结果产生的影响,从而实现更加精确的测量.
