基于多平台信息融合的船舶导航技术
2022-08-09沈庭钧
沈庭钧
(沪东中华造船(集团)有限公司,上海 200129)
0 引 言
近年来,全球航运规模持续扩大,据统计,2019年全球营运船舶总数量超过9.5万艘(总吨位在100以上的有推动船舶),如此庞大的数量可保障全球海上运输,但会增加航行安全风险。作为航行安全的重要保障,船舶导航技术的应用可为船舶航行提供准确的数据支持,依托综合导航系统对多平台信息的综合处理,可有效提高导航信息的可靠性和实时性,减少船舶航行安全事故的发生。
1 船舶导航技术发展概述
导航技术是人类在二维与三维空间探索中不会迷失方向的重要前提,船舶导航技术的发展使人类迈向大洋深处。船舶导航技术经历如下发展阶段:
第一阶段:经验导航阶段。经验导航是根据对天文和地理等特殊现象的总结,经陆上长期验证所使用的导航技术,如星象导航和地磁导航等,并利用相应原理研究制造六分仪、星象仪、计里鼓、司南和磁罗经等。经验导航主要是对航向的大致估算,不仅精度低,而且较易受到外部环境因素影响,仅可满足短距导航需求。
第二阶段:机械导航阶段。在近代导航技术的发展过程中,机械导航起到重要的承上启下作用,主要利用机械陀螺在高速转动下的指北特性确定航向,同时借助机械式计程仪(如航海表等)进行距离测算,在海图上确定船舶的大致位置[1]。机械导航技术精度明显提升,且受环境因素影响较小,在远洋航行中得到广泛应用,如电控陀螺罗经、平台罗经和航海表等。
第三阶段:电子信息导航阶段。电子信息技术在导航领域的应用改变传统导航模式,多元化的电子信息导航设备提供更加全面的导航信息,如船用雷达导航系统(Radar Navigation System,RNS)、光学惯性导航系统(Inertial Navigation System,INS)、多普勒计程仪(Doppler Velocity Log,DVL)和船舶自动识别系统(Automatic Identification System,AIS)等。综合导航技术的发展实现对多元平台导航信息的融合与管理,为实现船舶自动化和智能化奠定基础。
2 基于多平台信息的船舶导航技术分析
2.1 船用RNS与船舶AIS信息融合技术
RNS与AIS是船舶导航系统中较为关键的2种无线电导航设备,从实际使用效果来看,船用RNS与船舶AIS的信息融合可实现船舶航行态势的整体感知,并可进行高低搭配,保证船舶航行安全。
2.1.1 船用RNS
船用RNS基于传统无线电导航技术发展而来,早期船用RNS技术原理相对简单,依靠微波天线可对周围一定范围内的船舶和岛屿(或礁石)进行粗略的方位和距离测算[2]。依托现代雷达技术的日益成熟,裂缝天线成为船用RNS的标配,船用RNS计算机软件系统可同时对包括方位、距离、航向和航速等在内的目标数据进行计算,甚至可根据母船导航数据计算最近会遇距离(Distance to Closest Point of Approach,DCPA)和最近会遇时间(Time to Closest Point of Approach,TCPA),其中:自动雷达标绘仪(Automatic Radar Plotting Aid,ARPA)较具有代表性,可减轻航海部门人员的工作压力,为船舶航行提供更高的安全保障。
2.1.2 船舶AIS
船用RNS存在不足,近距离约有0.7 n mile的盲区,这为特殊航行区域内的船舶安全带来隐患,而船舶AIS的应用则可解决该问题。船舶AIS是基于甚高频(Very High Frequency,VHF)技术组建的区域导航网络体系,通过在系统软件中设置的识别信息,所有安装该系统的船舶均可及时获取有效通信距离内的其他船舶信息,包括航向、航速、船名、船籍和船型等,利用系统自带软件计算所处环境的风险级别,并可及时进行危险预警。船舶AIS具有电子海图功能,可帮助航海部门对海上航线和危险区域等进行显示,并结合全球定位系统(GPS)进行船舶定位,提高船舶导航数据精度。
2.1.3 船用RNS与船舶AIS信息融合技术
船用RNS是以所在船舶为基准,对探测范围内的其他船舶进行相对航向、航速和距离的探测,在排除罗经等导航设备提供的基础航向后,船用RNS的航向并不具有实际意义[3]。早期船用RNS仅可实现碰撞预警功能,即便是现在,以ARPA为代表的船用RNS在功能上依然需要大量的外部信息才可实现,而船舶AIS可解决这一问题。船用RNS与船舶AIS组成如图1所示。
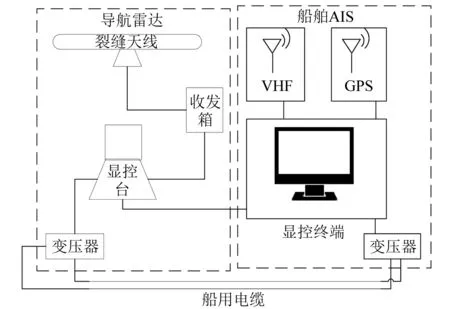
图1 船用RNS与船舶AIS组成框图
船用RNS与船舶AIS的信息融合使导航系统信息更加丰富,船用RNS可利用船舶自动导航系统中的GPS数据进行航迹向的推算,即通过相同时间间隔内连续两点A和B的经纬度(x1,y1)与(x2,y2)可得出其大致航向θ,具体推算公式如下:
θ=arccos[cosy1cosy2cos(x2-x1)+siny1siny2]
(1)
利用该航迹向,不仅解决船用RNS的真航向问题,而且可将该航向用于目标船舶的航行数据计算,计算数据与船舶AIS进行比对,以确保数据的准确性。船舶AIS可将0.7 n mile半径内的船舶信息发送至船用RNS,有效避免因盲区导致的复杂水域航行安全问题。
2.2 传统导航设备的信息融合技术
传统导航设备主要是指光学罗经、电控罗经、磁罗经和计程仪等。随着电子信息技术的不断发展,传统导航设备已实现多元信息融合,成为船舶导航系统基准数据的来源之一。
2.2.1 罗 经
目前,船用罗经主要分为光学罗经、电控罗经和磁罗经等3种类型。3种罗经在核心器件上差别明显,但基本原理相似。在导航数据和精度方面,磁罗经仅可提供航向信息,且精度最低;电控罗经可提供航向信息和姿态信息,精度居中;光学罗经可提供航向信息和姿态信息,精度最高。
2.2.2 计程仪
计程仪利用水对目标物力的作用实现船舶航行速度的测量,并通过对速度的积分计算船舶航程。早期计程仪分为拖曳式和转轮式,其技术原理较为简单,误差相对较大,对远距离航行并不适用。随着水压计程仪、电磁计程仪和DVL的出现,压力传感器技术、电磁感应技术和水声技术得到广泛应用,通过传感器将水流产生的压力信号转变为电信号,在滤波和放大环节后可减少外部干扰,经模数转换后对数字信号进行计算,最终得到船舶航速与航程。以电磁计程仪为例,其数据具有较好的线性特征,对船体速度变化敏感,通过水流(导体)切割安装在船体底部中轴线上的电磁传感器形成感应电压(或感应电流),并利用模数转换将其转换为船舶航速,经积分后可得到船舶航程信息。
2.2.3 传统导航设备的信息融合技术
在罗经和计程仪等传统导航设备的实际使用过程中发现:受多种干扰因素的影响,独立工作状态的传统导航设备所提供的航向、航速和航程等信息误差不断增加,对于需要长期连续航行的远洋船舶来说存在较大安全隐患[4]。针对这一问题,在完善相关算法的基础上,将导航数据进行融合处理,即组合导航系统,可提高导航数据的可靠性。
组合导航系统的出现结束长期以来导航装备相互独立运行的状态。狭义上的组合导航系统是指以罗经为核心的INS,而广义上的组合导航系统则是由多类型导航装备组成的数据综合处理系统。将INS作为组合导航系统的核心,是由于INS所提供的数据精度最高,具有可参照性。组合导航系统组成如图2所示,其中:劳兰(Loran)为音译名,为long range navigation(远程导航)系统的缩写。
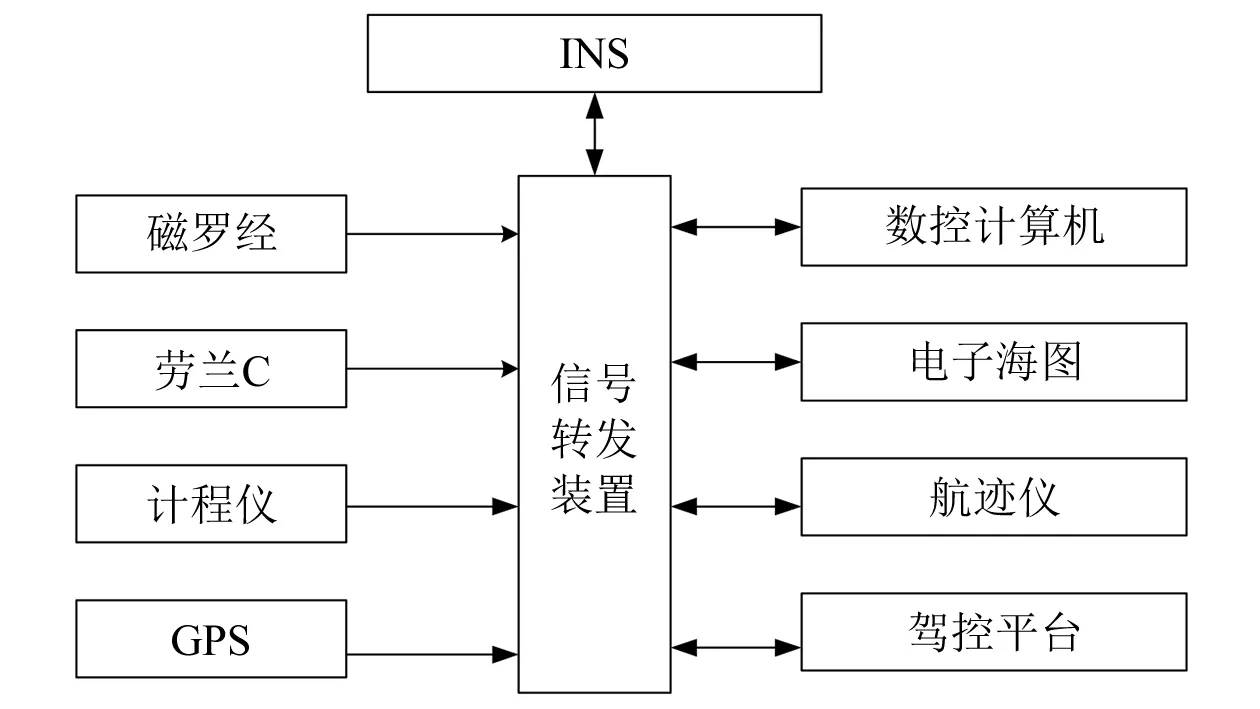
图2 组合导航系统组成框图
组合导航系统的实现主要采用最优估算法,其中卡尔曼滤波法的应用较为广泛。与维纳滤波等其他滤波方式相比,卡尔曼滤波对信号质量并未进行明确要求,通过对复合信号(真实信号与噪声的叠加信号)的处理,得出误差最小的真实信号的估计值。基于该算法的应用,组合导航系统功能如下:
(1)复合精度提升功能。真实信号来源的增加可弱化噪声对真实信号带来的干扰,提高真实信号估算精度。
(2)测量冗余功能。在导航系统中对同一数据存在重复测量现象,即存在测量冗余,样本数量的增加可提高计算结果的可靠性,并有利于排除样本中的“野值”对卡尔曼滤波计算结果造成的影响[5]。
2.3 基于多平台信息融合处理的综合导航系统
船用导航装备类型的丰富与数量的增加在一定程度上提高船舶航行的安全性,但导航系统数据量的增加会提高数据处理难度。为实现导航数据的统一管理,提出综合导航系统概念。
2.3.1 综合导航系统功能及组成
综合导航系统是现代远洋船舶的标配之一。与传统导航系统或平台相比,综合导航系统是导航技术、计算机技术、网络技术、信息融合技术、无线电技术和卫星通信技术等多种先进技术的集成。综合导航系统通过接收外部导航终端发送的信息,并根据信息类型对相同信息进行计算,完成目标信息的二次融合,使原本复杂的导航信息更加直观,精度明显提高。综合导航系统组成如图3所示。
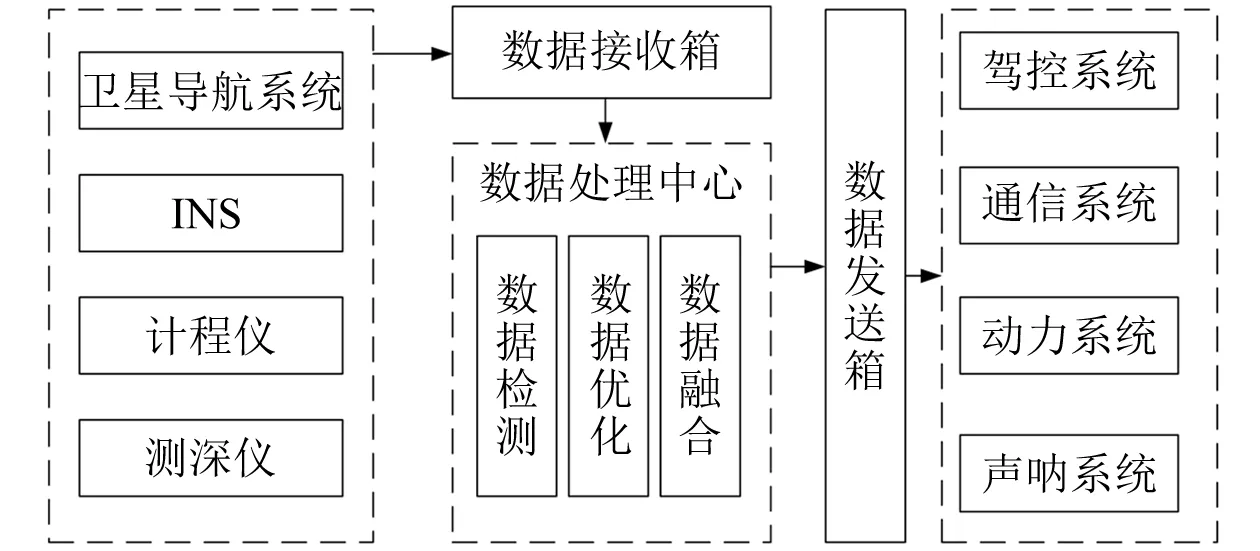
图3 综合导航系统组成框图
综合导航系统几乎涵盖所有与导航相关的设备,不仅包括输出导航信息的设备,而且包括众多需要依托导航信息才可正常工作的系统,如驾控系统、通信系统、动力系统和声呐系统等。综合导航系统的核心是数据处理中心,通过数据检测技术、数据优化技术和数据融合技术,完成对多平台信息的高效利用,使导航信息更加真实、可靠。
2.3.2 数据检测技术
综合导航系统数据处理中心在接收导航信息后,需要对数据的有效性进行分析,减轻下一阶段数据优化的压力。针对综合导航系统常见的数据单点异常、关联异常和集体异常等3种现象,在此过程中采用的导航数据检测技术主要为如下3种:
(1)聚类检测技术。由于在导航系统中异常数据的产生大多具有一定的规律性,因此在数据检测过程中可对某一异常数据的特征进行分析,并将具有与该特征高度相似的数据进行归类[6]。聚类检测技术的应用虽可提高检测效率,但由于无法对导航信息影响因素的关联性进行明确,因此在实际使用中对数据源的稳定性和可靠性要求较高,无法适用于复杂噪声环境下的导航数据检测。
(2)偏差检测技术。通过对海量导航数据进行分析,并在此基础上构建对应数据的仿真模型,进行数据仿真结果比对,计算数据偏差是否在阈值范围内,确定综合导航系统所接收的导航信息的准确性。基于数学模型的偏差检测技术精度高,但综合导航系统数据量较大,数据模型仿真存在明显的滞后性。
(3)概率相关技术。综合导航系统所接收的导航数据来自不同的导航设备,部分异常数据之间存在一定的相关性,对某一数据的异常现象可通过具有相关性的导航数据进行体现。数据之间的相关性越高,则数据同步异常的概率越高。例如,船用INS的速度v和航程x的信息通过加速度计实时数据积分而来,如图4所示。
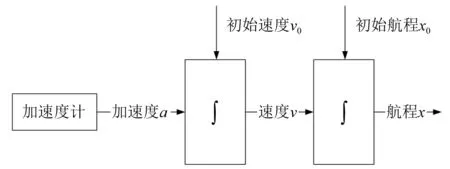
图4 INS的速度和航程积分示例
若不考虑外部干扰的影响,则速度v和航程x的公式为
(2)
(3)
式(2)和式(3)中:t为时间。
INS的加速度是航速和航程的元数据,三者之间为100%相关,一旦加速度数据异常,则直接导致INS输出航速和航程数据异常。通过概率相关技术,可提高数据异常的检测效率,保证数据的可靠性。
2.3.3 数据融合技术
传统导航系统强调导航数据的真实性,即根据导航设备的数据精度确定导航系统的数据来源,由此减轻导航系统在数据处理方面的压力。随着计算机技术的不断发展,计算机数据处理能力明显提高,这为数据融合技术在综合导航系统中的应用奠定基础。
综合导航系统数据融合技术对一切具有实用价值的导航信息进行采集、传输、综合、过滤、相关和合成,辅助完成环境态势判定、任务规划和故障诊断等相关工作,具体可分为数据层融合、特征层融合和决策层融合,其中数据层融合和特征层融合的使用较为广泛[7]。以航向数据为例,综合导航系统航向数据来自INS、GPS(航迹向)、北斗系统(航迹向)和船舶AIS(航迹向)。综合导航系统在接收对应数据后,通过比对航向数据之间的差值,结合驾控系统实际航向变化趋势,在实时数据的基础上进行误差在线修正和加权平均,修正的数据作为综合导航系统的航向真值。
在实际使用中,综合导航系统集成电子海图和航迹仪等多种功能,可实现与船用RNS、船舶AIS的目标融合,实际效果如图5所示,其中:①、②和③分别为船用RNS A、船用RNS B和船舶AIS所提供的目标方位;在结合气象仪、GPS、计程仪和激光测距仪等相关平台信息进行目标融合后,综合导航系统最终显示融合目标方位④。
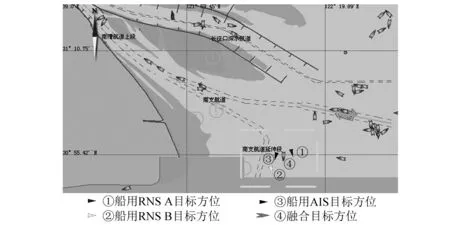
图5 多平台信息的融合示例
3 基于多平台信息的船舶导航技术发展趋势
3.1 船舶导航技术的智能化
在全球船舶运输行业持续发展及海上船运数据网络日益完善的情况下,船舶导航数据的智能化将成为现实。通过人工设定导航数据,船舶可通过卫星接收岸基综合管理平台的统一调配和管理。智能导航系统可根据航行区域的实际情况,结合航速和航向等数据,保持与其他船舶的安全距离,可针对航行区域内存在的安全风险向岸基综合管理平台预警,并采取有效的规避措施,避免航行安全事故发生。
3.2 船舶导航技术的网络化
船舶导航技术的网络化包括内、外两个方向。内部网络化是指船舶导航设备之间通过局域网进行数据传输,实现导航数据的实时传输,规范导航数据格式,提高数据处理效率[8]。外部网络化是指构建区域海洋导航数据网络,利用大数据网络技术为船舶导航数据融合处理提供跨平台数据参考,在此过程中可依托船舶之间的导航信息进行区域航行数据的异常检测,并对区域范围内的船舶航行数据误差进行整体修正,提高船舶航行数据的可靠性和准确性。
4 结 语
船舶导航技术水平的不断提升为船舶远洋航行提供保障,针对船舶导航设备多元化发展的现状,应促进多平台信息的综合处理与融合,充分利用数据优势,构建更加精准、实时和系统的船舶航行安全保障模式。