基于LM优化BP神经网络的5G室内定位
2022-08-02武建锋焦喜康薛嘉琛
刘 源,徐 威,武建锋*,焦喜康,薛嘉琛
(1.中国科学院国家授时中心,陕西 西安 710600;2.中国科学院大学 电子电气与通信工程学院,北京 100049;3.中国人民解放军95928部队,山东 临沂 276216)
0 引言
在室外,全球导航卫星系统(Global Navigation Satellite System,GNSS)可以提供高精度的位置导航服务,但在室内由于物理阻隔,GNSS信号大幅度衰减,卫星定位性能受到严重影响。而近几年,随着智慧城市的不断建设,智慧城市的各类应用场景需要准确的室内位置信息,室内定位在生活中占有愈发重要的地位。
随着无线技术的快速更迭,大量适合于室内定位的技术快速涌现:WiFi、蓝牙、红外线、超声波、超宽带(Ultra Wide Band,UWB)和地磁等技术应用在室内定位领域。但是各类技术都有其特定的缺陷:红外与超声波技术会受到极大的非视距(Non Line of Sight,NLOS)影响;蓝牙和WiFi因为功率过大导致续航性能不佳,且本身定位误差较大;UWB和地磁定位因为建设成本过高而无法大规模商用。
而第五代(5G)移动通信技术的出现,使得以毫米波通信为代表的技术得到了日益广泛的应用[1],在满足通信需求的同时,也为高精度室内定位提供了新思路。
5G专门设计了定位参考信号(Positioning Reference Signal,PRS)[2],从关键技术上使用新的编码方式,具有大带宽的特点,有利于参数估计,其频率高、时延短的特性支持获取更高精度的到达时间(Time of Arrive,TOA)观测量,为更高精度的室内定位提供了必要条件。
移动位置服务一直都是蜂窝移动网络研究的重要课题,这方面有大量的研究。Foy通过泰勒级数展开将到达时间差(Time Difference of Arrival,TDOA)观测方程线性化,迭代计算定位坐标[3]。Chan使用二次加权最小二乘法计算位置点坐标[4]。近年来,随着人工智能领域理论和技术日益成熟,应用领域也不断扩大,许多专家学者将人工智能与室内定位算法进行了探索。白杨[5]在TDOA定位过程中结合了数据挖掘和机器学习算法,使得定位结果具有较好的鲁棒性。马子耀等[6]采用接收信号强度指标 (Received Signal Strength Indication,RSSI)值和超声波数据训练BP神经网络提高了移动机器人定位性能。吴浩[7]提出了一种基于神经网络的射频识别(Radio Frequency Identification,RFID)定位误差修正技术,提升了算法的定位精度,但鲜见将5G定位与神经网络相结合的具体实践。
5G室内定位领域所使用的主要技术有:利用信号TOA的方式、基于信号到达角(Angle of Arrival,AOA)的方法和基于到达频率差(Frequency Difference of Arrival,FDOA)的方法等[8]。在复杂的室内环境中,以上方法的误差主要来源于NLOS所造成的NLOS误差和多径干扰。
为了能够降低NLOS误差,本文提出使用LM算法优化的BP神经网络拟合TDOA与目标点之间的映射关系,依靠神经网络的非线性映射能力降低NLOS造成的定位误差[9]。发现LM-BP神经网络相比传统Chan算法具有更高的抗NLOS能力与定位精度。
1 5G室内定位系统介绍
5G室内定位系统由5G网络基站、时间同步系统和移动定位接收终端3部分构成,系统组成如图1所示。

图1 5G室内定位系统组成Fig.1 Composition of 5G indoor positioning system
5G室内定位系统的实现过程是:实验场地内利用全站仪建立笛卡尔局域坐标系,之后将LM-BP神经网络实验终端置于试验场地内,接收由4个5G基站发送的定位数据,获取实验终端与基站之间的TOA,从而得到TDOA。使用由全站仪测得的准确坐标以及其对应的TDOA数据所构成的多组训练样本训练LM-BP神经网络模型,得到最优模型后,实时将待测点的TDOA数据输入最优模型中解算,最终得到预测的待测点坐标。
时间同步系统由1个时间同步主端与4个时间同步从端组成。参考时间通过公共电缆与基站相连,各个基站通过另一根短电缆与基站的天线部分相连。系统允许基站通过电缆进行彼此通信的同时接收主时钟的同步信号[10]。时间同步系统可以保证各基站时间信号同步,大大降低授时延时所造成的系统定位误差。系统由中国科学院国家授时中心自研,同步精度可达到2 ns以内,满足5G基站精细定位同步精度的要求。
2 定位算法介绍及误差分析
2.1 基于TDOA的Chan算法
TDOA采用信号到达2个基站的绝对时间差实现定位[11]。此方法可以消除基站间钟差。
设实验终端坐标为(x,y),4个基站A,B,C,D坐标分别为(x1,y1),(x2,y2),(x3,y3),(x4,y4),其中A基站为参考基站,则实验终端与第i个基站的距离ri为:
(1)
式中,ti-t0表示基站i接收到信号时间与实验终端发送信号时间的时间差;c为电磁波传播速度。
根据式(1)另有如下关系:
ri2=(x-xi)2+(y-yi)2=Ki-2xix-2yiy+x2+y2,
(2)
式中,
Ki=xi2+yi2。
(3)
设标签到达A基站和到达其他基站的距离差为:
(4)
根据式(4)另有如下关系:
(5)
将式(2)代入式(5)可推出:
(6)
令xi,1=xi-x1,yi,1=yi-y1,得到:
式(6)消除了未知数的平方项,仅保留了一系列线性方程。当i取1,2,3时,可得:
(8)
经化简整理可得:
(9)
接下来求解(x,y):
(10)
(11)
则:
(12)
(13)
(14)
则:
(15)
因此,式(9)可化简为:
(16)
对于未知数r1可将式(16)带入式(2),当i=1时:
[(x1-P1)2+(y1-P2)2]=0,
(17)
可得:
a×r2+b×r+c=0,r=r1。
(18)
求解该方程得到r1,将r1带入式(16)可得到(x,y)。
为评估TDOA-Chan定位质量,可采用均方根误差(RMSE)作为评价指标[12]:
(19)
式中,(x′,y′)为实验终端的真实位置。RMSE可评估测试结果与真实坐标的偏差。
2.2 NLOS误差模型分析
在实际测量过程中,基站与实验终端之间采用5G毫米波信号发送数据,但室内环境复杂,多径效应会使5G信号在发生不同程度的反射、折射和叠加的同时也会产生NLOS误差,其产生原理如图2所示。基站与实验终端之间的实际测量距离Ti在NLOS条件下可表示为:

图2 NLOS误差产生原理Fig.2 NLOS error generation principle
Ti=ri+ei+ni,
(20)
式中,ri表示实验终端到i基站的真实距离;ei表示时钟误差和测量设备带来的系统性误差;ni表示NLOS误差。
对实验环境中任选一点P(2.04,18.03),分别在视距 (Line of Sight,LOS)和NLOS条件下测量基站A到点P的TOA,NLOS造成误差影响如图3所示。

图3 非视距、视距测量对比Fig.3 NLOS and LOS measurement comparison
LOS环境下,TOA标准差为0.081 5 μs;NLOS环境下,TOA标准差为1.412 1 μs。由此可见,NLOS误差对TOA影响很大,进而导致定位结果严重偏离真实坐标。
2.3 基于LM算法的BP神经网络优化算法
复杂的室内环境中NLOS会导致TDOA标准差发生严重抖动,导致定位结果失真。BP神经网络能够快速准确处理非线性方程,在一定程度上校正伪距偏差,部分抵消TDOA标准差抖动带来的对定位结果的扰动。
2.3.1 BP神经网络简介
BP神经网络全称是反馈神经网络,是一种按照误差逆向传播算法训练的多层前馈神经网络,经常用来监督式预测,因其结构简洁、性能高效被广泛应用[13]。网络一般由输入层、一个输出层以及一个或多个隐含层构成,参数为层与层之间的权值和阈值[14]。这样的结构可以记忆较多的输入输出矩阵,并且不需要预先知道输入输出矩阵关系方程。单层神经网络的拓扑结构如图4所示。
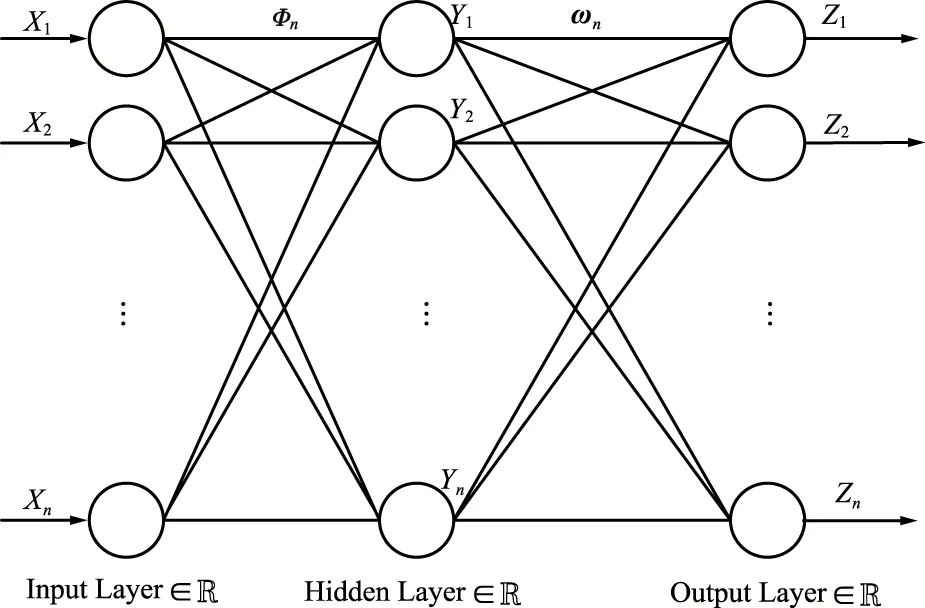
图4 单层神经网络结构Fig.4 Single layer neural network structure
图4中,Xn为神经网络的n个输入,Yn为隐藏层的n个神经元,Zn为神经网络的n个输出,Φn为输入层到隐藏层之间的权值,ωn为隐藏层到输出层之间的权值[15]。
LM-BP神经网络算法模型在输入层输入的是带有NLOS误差的TDOA测量值,输出层输出的是待测点的平面坐标。
2.3.2 优化过程介绍
(1) 选取合适的训练样本
合适的神经网络训练样本数据直接关系到最终模型的性能。而训练数据选取的关键在于样本数据的代表性和准确性。另外,选取的样本分布需要兼顾均衡性,应该尽可能多地涉及系统过程可能发生的各种情况。同时要在兼顾数据质量和分布均衡的条件下尽可能多地获得样本数据。
为获得较为准确的训练样本,在中国科学院国家授时中心试验厂区办公楼地下室布设4个5G基站,地下室为50 m×30 m的长方形区域,并在此基础上建立局域坐标系,利用全站仪测量4个基站的局域坐标系的真实坐标,基站信息如表1所示。
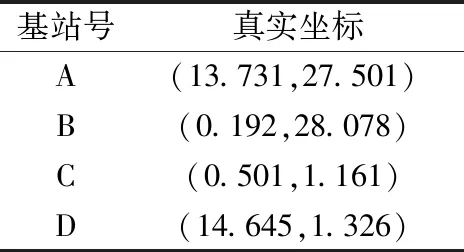
表1 5G基站真实坐标Tab.1 Real coordinates of 5G base station 单位:m
同时根据前文提到的样本选取规则依次选取44个点,并用全站仪测量它们的真实坐标,取其中25个点为数据样本点,记为Pn(xn,yn),n=1,2,3,…,25,另外19个点为验证点。试验区的俯视平面图如图5所示,图中红色点为样本取值点。
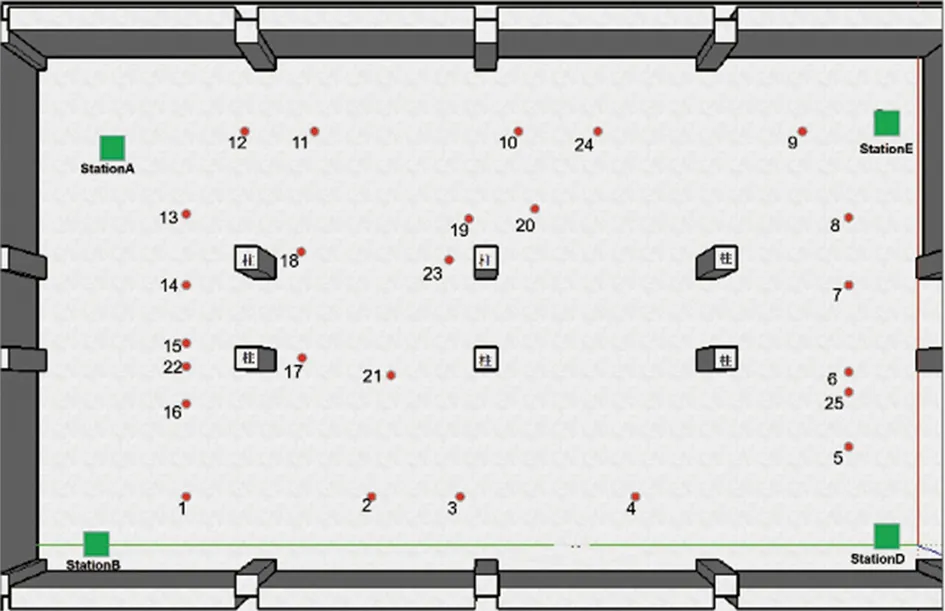
图5 样本点分布平面图Fig.5 Sample point distribution

实际数据因测试环境与其他未知因素影响,存在少量离群点,将影响模型的输出性能。本文采用拉依达法对测得的TOA数据进行离群数据过滤,判断其是否满足:
(21)
式中,xout表示需要剔除的离群数据;s表示标准偏差。
将处理后的每个点的多组TOA数据求算术平均后,计算B,C和D基站相对于A基站的TDOA,将25个样本点得到的25组TDOA数据记为T′n。
神经网络通常限制输入变量处于区间[0,1]或者[-1,1],为防止奇异样本数据造成训练时间延长,应先将输入数据即T′n进行归一化处理。
本文采用Z-score标准化方法将原始数据的均值和标准差进行数据标准化[16],将原始数据T′n标准化为Tn:
(22)
式中,μ为均值;δ为标准差。
(2) 确定神经网络的结构
神经网络模型具体结构确定的关键在于确定模型隐藏层的数量,但针对3输入2输出模型,一般不会超过4层,本文经过对不同层数神经网络模型的实际定位结果分析,最终选用单隐含层模型,该模型结构简洁,性能高效。
隐含层神经元个数为:
(23)
式中,I为输入层个数;O为输出层个数,本文选取H=10。
BP神经网络具体拓扑结构如图6所示,它是一个3层前向网络系统。隐含层神经元个数为10,神经网络训练样本输入为Tn,输出为Pn。
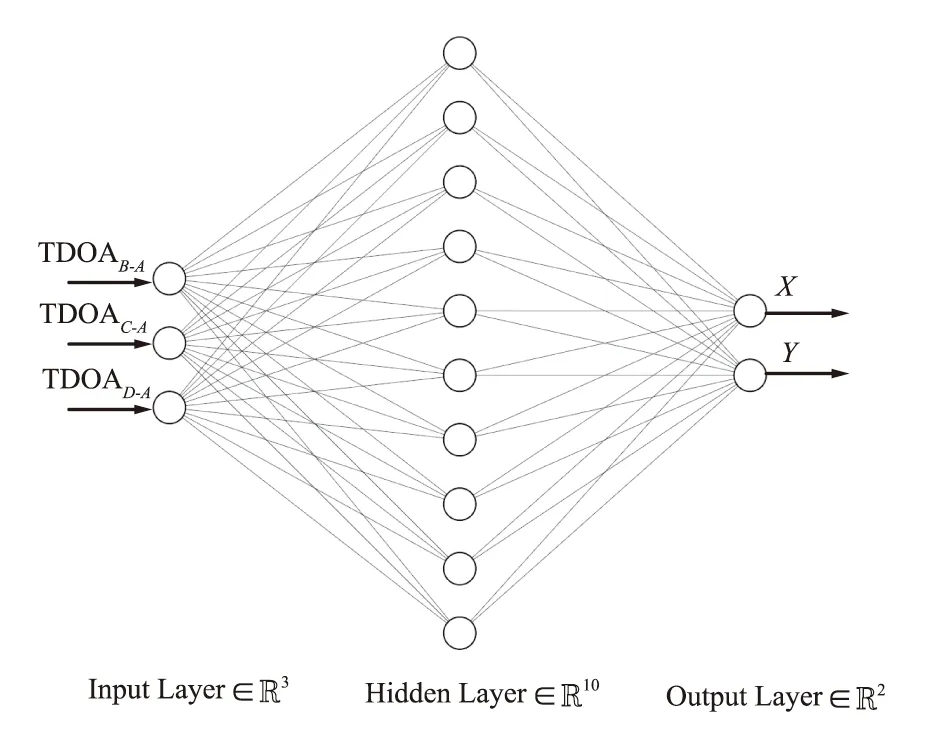
图6 BP神经网络拓扑结构Fig.6 Topology of BP neural network
最终建立BP神经网络模型结构为3-10-2。为了使网络能够适应更复杂的问题,本文采用Sigmoid作为隐藏层的激活函数,其具体形式为:
(24)
所涉及BP神经网络模型为:
Zn=φS(X(n)φ+B1)+B2,
(25)
式中,Zn表示经优化后的定位坐标;X(n)为经过数据归一化和离群点剔除后的输入层矩阵;φ为输入层到隐含层的权值矩阵;B1为隐含层到输出层的阈值常数;B2为输出层阈值常数。
(3) 训练算法选择
经典的BP模型基于梯度下降法,其训练过程的本质是不断调整权值和阈值,以使得模型输出与实际值的均方差梯度趋于最小。但梯度下降法作为一阶收敛不仅下降速度较慢,且易陷入局部最小值[17]。
为改善经典BP模型的不足,提出使用LM方法优化BP网络。LM通过求解式(26)来获取搜索方向:
(26)
式中,μk>0,此时dk满足:
(27)

(28)
由式(27)可知,LM算法特性与μ的选取有关。当μ相对较小时,算法特性与高斯-牛顿法相似;当μ取值较大时,则与梯度下降法相似。LM算法利用二阶导数加快收敛速度,避免陷入局部最值。故本文选取LM算法优化BP神经网络。
3 实验与分析
将前文所测得的25组样本数据(Tn,Pn)中的72%作为训练集,16%作为测试集,12%作为验证集。
为了验证LM-BP神经网络的定位性能,使用25组由准确的样本点TDOA数据及其相对应坐标构成的训练样本进行神经网络模型的训练,利用训练完成的模型对待测点进行预测,处理待测点的实地测量TDOA数据,将得到的定位结果与Chan算法的定位结果进行分析比对,得出结论。
将样本数据输入图5所示结构的神经网络模型中,使用LM算法对BP神经网络模型进行训练。模型误差变化曲线如图7所示,模型最佳性能出现在第7次。预测结果分布如图8所示。
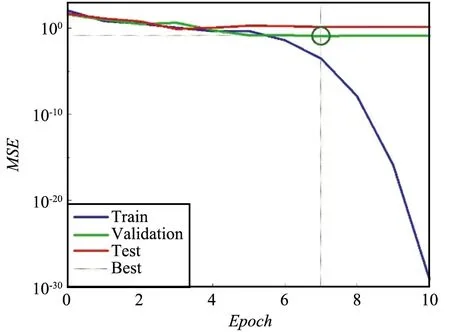
图7 BP神经网络误差变化曲线Fig.7 Error curve of BP neural network

(a) 训练样本R=0.999 71
式(25)中关于模型的具体权值矩阵和阈值常数矩阵分别为:
B1=(4.482 2 3.243 7 2.961 2 1.352 4 0.949 4 -0.308 3 0.947 2 1.622 8 -3.271 0 3.965 5)T,
B2=(-0.366 8 0.152 6)T。
3.1 5G室内静态定位
在试验场内随机均匀选取19个静态测试点,验证所获模型的静态定位效果,选点位置如图9所示,其中绿点为验证点,红点为样本点。
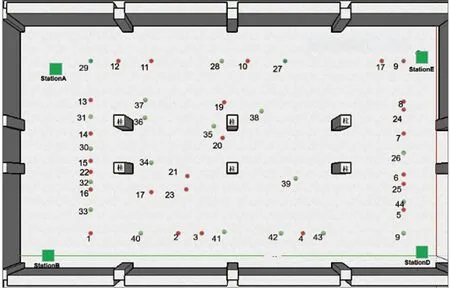
图9 待测点分布平面图Fig.9 Distribution of the points to be measured
对图9中19个待测点分别进行静态测量,每个点测量750组TOA数据,按前文提到样本点TOA数据处理方式,剔除离群点,分别做差消除基站与接收机之间的钟差,取算术平均数并归一化算术平均得到Tn,将Tn分别代入Chan算法和LM-BP神经网络模型,得到如图10所示的定位结果,其中“+”代表Chan算法处理后的坐标点,“·”代表LM-BP神经网络处理得到的定位结果,“*”代表全站仪参考坐标,“◇”代表基站位置。
从图10中可较为明显地看出,多数LM-BP神经网络处理得到的定位结果相比Chan算法定位结果更接近参考点。

图10 静态定位结果对比Fig.10 Comparison of static positioning results
整体来看,分别将LM-BP神经网络算法和Chan算法下得到的19个点的均方根误差求算术平均,可得LM-BP神经网络算法的RMSE为0.345 7 m,Chan算法的RMSE为0.851 4 m。
3.2 LM-BP算法抗NLOS性能分析
TDOA标准差可以反映NLOS对定位性能的影响[18],经过测定,A基站TOA伪距标准差相对最为稳定,故从图中选取7个静态点,分别计算B,C,D基站相对于A基站伪距差并统计伪距差抖动情况,观测不同点在Chan和LM-BP两种算法下的RMSE。具体选点及数据统计如表2所示。

表2 选点定位误差及伪距抖动数据统计Tab.2 Point selection error andpseudorange jitter data statistics
由表2可知,当每组3个伪距标准差均小于0.2 m时,可近似看待环境为LOS[19],传统的Chan算法和LM-BP神经网络算法有着相似的定位精度,但定位计算过程中LM-BP神经网络算法与Chan算法相比具有更高的时间复杂度,所以此时Chan算法的定位性能好于LM-BP神经网络算法。
随着每组3个伪距标准差中出现较大值,系统中出现了NLOS误差,Chan算法的RMSE均有不同程度的上升,LM-BP算法虽有明显上升但上升幅度远小于Chan算法。
在图2所示的NLOS条件下使用LM-BP算法改善A基站到点P的TOA,改善效果如图11所示。
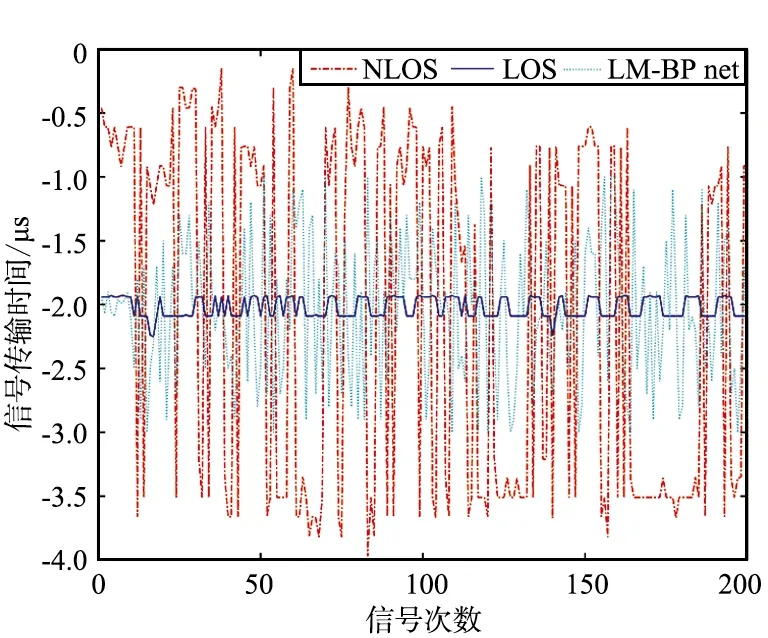
图11 LM-BP对TOA的改善Fig.11 Improvement of TOA by LM-BP
由图11可知,经LM-BP算法改善后,NLOS环境下TOA的标准差由原来的1.412 1 m下降至0.625 3 m。
基于以上分析可知,Chan算法在LOS条件下具有较好的定位性能,但抗NLOS性能表现不佳,LM-BP算法较Chan在NLOS环境下定位结果更加准确。由此可以说明,LM-BP神经网络算法能够优化伪距剧烈变化而导致的测量误差,能够较为准确地拟合TDOA数据与目标点真值的对应关系,具有较强的抗NLOS能力。究其原因是因为BP神经网络对非线性方程强大的处理能力和伪距偏差的校正能力。
3.3 5G室内动态定位
在动态定位过程中,将实验终端放置于小推车上,使其按图12所示的红色虚线轨迹以0.5 m/s匀速运动,测试其动态定位性能。

图12 动态定位结果对比Fig.12 Dynamic positioning results comparison
图12中,蓝色点“·”为LM-BP算法得出的动态轨迹,它的RMSE为0.451 1 m,达到了亚米级精度,绿色点“·”为Chan算法得到的定位轨迹,它的RMSE为2.688 7 m。
4 结束语
本文提出了一种基于LM算法的BP神经网络算法,该算法以LM算法优化BP神经网络,改善了其收敛速度慢、易陷入局部最小值的不足,并且继承了BP神经网络对非线性方程的强大处理能力以及对伪距偏差的矫正能力,从而建立了TDOA与待测点坐标值的对应关系,克服了Chan算法在定位解算过程中易受NLOS影响的不足。实验表明,在动态和静态定位过程中,基于LM算法的BP神经网络算法的定位精度较Chan算法效果更好,且对NLOS误差具有较强的抑制能力。
本文只探究了二维平面中LM-BP算法与Chan算法的性能,引入高程变量并探究如何选取最小样本从而获取最优模型将作为进一步的研究方向。
