基于机载LiDAR的建筑物轮廓线提取
2022-08-01吴智平
吴智平
[拓远(福建)勘测规划有限公司 福建 福州 350002]
0 引言
机载激光雷达(light detection and ranging,LiDAR)经过几十年的发展,已由单一测距发展到众多领域,其中利用LiDAR点云实现建筑物建模是研究热点之一[1-3]。建筑物轮廓线是建筑物建模的基础数据,针对建筑物轮廓线的提取有众多学者展开了研究,提出的方法主要有Alpha Shapes算法、snake算法、凸包算法等[4-5]。由于点云分布不规则、屋顶边缘存在缺失等,提取到的轮廓线表现为不规则的折线,无法反映真实屋顶边缘,需要对轮廓线做进一步精简处理,如沈蔚对Alpha Shapes算法得到的初始轮廓线强制正交处理[6],Ma通过高斯—马尔可夫模型进行加权调整,将轮廓线分为平行或垂直的两组[7]。
目前,建筑物屋顶愈发复杂,其边缘已不再仅表现为垂直或平行两种形态,针对建筑物轮廓线的精确提取需进一步展开研究,本文以原始点云数据为基础,探究建筑物轮廓线提取的整体流程,主要步骤分为:建筑物脚点识别、建筑物轮廓线提取。其中,建筑物脚点识别采用渐进三角网滤波及基于随机森林的点云分类,建筑物轮廓线提取采用基于方向约束的随机抽样一致算法(random sample consensus,RANSAC)。
1 建筑物脚点识别
1.1 渐进三角网滤波算法
从原始点云数据中提取建筑物轮廓线,首先需要识别出建筑物脚点,即从点云数据中提取出建筑物点云,为避免地面点对后续分类的影响,本文首先采用三角网渐进加密滤波算法剔除地面点。该滤波算法是公认的较为优异的滤波算法,通过地面种子点粗糙表达地面模型,借助反复距离与反复角判断其余点的归属[8]。其原理如图1所示。
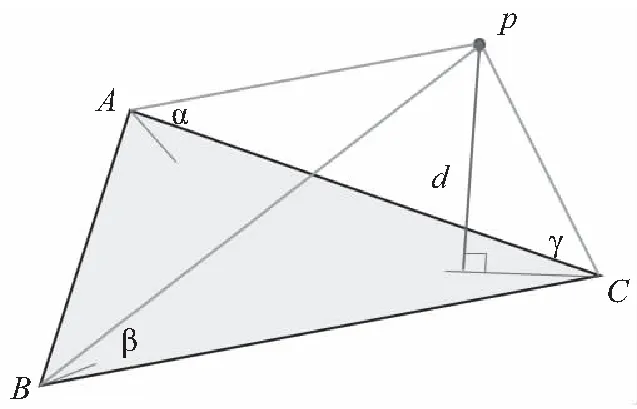
图1 TIN模型判断示意图
图1中,α、β、γ为反复角,d为反复距离,若其均小于设定阈值,则认为点P为由A、B、C点确定的地面模型中一地面点,将判断得到地面点加入地面模型重新构网,通过以上迭代操作,使得地面模型逐步精化,逼近真实地面。
1.2 基于随机森林的点云分类
地物点中进一步提取建筑物点,需要借助分类算法。随机森林为集成算法,通过将多棵决策树集成投票,得到输入数据的类别[9]。该分类器被广泛使用,在文献[10]中,发现该分类器的分类效果要好于SWM分类器,故本文借助随机森林实现面片的分类。
点云特征的有效提取是点云高精度分类的前提,本文选取了22个分类特征,包括5种类型:基于高程的特征、基于记录信息的特征、基于特征值的特征、基于投影面积的特征及其他特征,具体如表1所示。

表1 分类特征汇总表
为减少篇幅,仅选取其中4个分类特征详细介绍。
平均高程Hmean是面片对象中所有点云的平均高程,其计算公式如下:
(1)
其中,N为面片对象中点云总数;Hi为第i个点的点云高程值。
多回波比例BMecho代表面片对象中多回波的点云数量占点云总数量的比重,公式如下:
(2)
其中,NMecho表示某一面片中多回波脚点的数量。
线度λl代表面片对象点云构成的协方差矩阵的特征值参数,其求解过程可参见1.2节,该参数的计算公式如下:
(3)
拟合误差的平均值Rmean代表面片对象中各点到拟合平面的残差平均值,公式如下:
(4)
2 基于方向约束的建筑物轮廓线提取
本文采用Alpha Shapes算法实现建筑物初始轮廓线的提取。Alpha Shapes算法将半径为Alpha圆滚动的痕迹视作点集的轮廓点。沈蔚将Alpha设置为平均点云半径的2倍左右,取得了较好的效果。图2为Alpha Shapes算法示意图,用半径为Alpha的圆对点集进行滚动得到外围轮廓点,依次相连得到该点集的轮廓线,如图中黄色折线。

图2 Alpha Shapes算法示意图
初始轮廓线仅为建筑物粗略边界的表达,为不规则的折线,与真实的屋顶边界线存在较大的差别,需要进一步规则化处理。鉴于现实中建筑物大多较为规则,其边缘为几组不同方向的折线,可通过寻找稳健方向作为约束条件提取轮廓线,本文选取长度最大轮廓线方向作为稳健方向。其余轮廓线与稳健方向存在一定关系,即部分轮廓线与稳健方向平行或垂直,基于这种关系采用方向约束的RANSAC算法提取此部分轮廓线,具体步骤如下:
(1)选取最长轮廓线,取稳健方向水平向量,记作Al,并求得其垂直向量,记作Bl;
(2)依次选取L={Al,Bl}作为某一轮廓线的直线检测方向向量,并遍历初始轮廓点,取其中某一点(x0,y0)作为直线上某点,此时这一直线记作l。下式为l的点向式方程:
(5)
(3)计算轮廓点到直线l的距离,若小于阈值,则认为该点为直线内点,统计该直线的内点数量,记录该条直线及其内点;
(4)遍历初始轮廓点,选取下一点作为直线一点,重新求解检测直线方程,重复步骤(3),直至全部轮廓点均得到遍历;
(5)比较每次检测出的内点数量,记内点数量最大值为nummax,若nummax大于阈值,则认为检测到某一轮廓线,该轮廓线即为内点数量最多的检测直线,将该直线对应的内点标记为flag;
(6)删除标记为flag的内点,重复步骤(1)~步骤(5),直至检测不到满足内点数量的直线;
通过以上过程提取出与稳健方向垂直或平行的轮廓线,对于与稳健方向无特定关系的轮廓线,采用无约束的RANSAC轮廓线检测方法,即不对检测直线的方向加以约束。

(a)初始轮廓线
3 实验结果与分析
为验证本文建筑物轮廓线提取流程的可行性,选取Vaihingen城区机载LiDAR数据集进行实验,Vaihingen城区数据是由国际摄影测量与遥感学会(International Society for Photogrammetry and Remote Sensing,ISPRS)第二工作组提供的建筑物提取及建模研究标准数据集,在该数据集中,建筑物较为密集,建筑物结构复杂多样。
首先,利用渐进三角网滤波实现地面点与非地面点的过滤,如图4(a)所示,灰色为地面点,红色为非地面点。借助22个分类特征训练随机森林分类器,进一步将非地面点分为建筑物、树木以及车辆、篱笆等其他地物类型,图4(b)中,蓝色表示建筑物、绿色表示树木、红色表示其他地物类型。图4(c) 、图4(d)为局部区域立体显示效果图,可以看到滤波及分类处理良好,其中建筑物分类效果较好,可满足建筑物轮廓线提取需求。图4(e)为叠加点云的正射影像图,蓝色折线为提取出的轮廓线,轮廓线与建筑物屋顶边缘贴合程度较好,屋顶点云基本位于轮廓线内侧或附近,说明提取出的轮廓线平面位置较为精确。
为对提取出的轮廓线精度定量评价,每个建筑物选取6条轮廓线,分别统计这些特征线相距正射影像屋顶边缘的距离,并用像素代表距离值,结果如表2所示,轮廓线最大偏差在3个像素以下,可以较好地反映真实建筑物外部边缘平面位置。

(a)滤波结果图

表2 建筑物屋顶线轮廓线平面精度 单位:像素
4 结束语
建筑物轮廓线是建筑物建模的基础数据,本文探究了一套原始点云数据中建筑物轮廓线提取流程,其中提出了基于方向约束的建筑物轮廓线规则化方法,实现了建筑物轮廓线较高精度的提取。实验表明,本文算法建筑物轮廓线与实际套合较好,偏差稳定在较低水平,但本文算法的约束方向需要手动选线确定,自动化程度较低,对稳健方向的自动化确定是后续研究的重点。
