离子液体柔性应变传感器3D打印工艺及性能研究
2022-07-27伍硕中
崔 鹏,伍硕中,云 忠
(中南大学,湖南长沙 410200)
0 引言
目前,越来越多的智能检测设备已经配备了丰富的应变传感器,并且应用到智能穿戴、智能家居、医疗诊断、生物工程、工业生产、航空国防等多个领域[1]。随着信息时代对应用的需求不断增长,对传感器检测范围、精度、稳定性的期望和要求也在逐渐提升。
传统的力学应变传感器材质大多为金属或者无机半导体,应变范围小是这种刚性传感器的天然短板,并且在一些特定场景下应用困难,因此柔性传感技术的研究发展十分重要[2-4]。作为新兴电子领域中的佼佼者,柔性传感技术依靠先进的材料、先进的制造技术和系统的微型化,在电子皮肤[5-7]、生物医学[8-9]、可穿戴电子产品[10-11]和航空航天的发展过程中发挥了重要的作用。
柔性应变传感器将外部形变转换为电信号,性能的优劣主要取决于其使用的导电材料。离子液体是一种完全由离子组成的液态电解质,其具有宽阔的电化学电位窗和良好的离子导电性,在电池、电容器、晶体管和电沉积等领域应用广泛[12]。
在过去几年中,3D打印因其制造简单、成本低廉、打印材料多样化以及多材料制造的能力而引起了广泛关注。由于这些优势,3D打印已应用于各种功能设备的制造,包括储能设备、电子设备、生物医学设备和各种传感器[13-14]。与传统制造方式相比,3D打印技术的出现,给柔性传感器的制备提供了新的思路。
本文提出一种3D同轴打印离子液体制作柔性应变传感器的方法。设计了柔性可拉伸离子液体的原位封装结构,搭建了用于同轴打印的挤出系统,优化了同轴挤出的3D打印工艺,并在此基础上进行了柔性应变传感器性能研究。
1 材料与方法
1.1 材料
1.1.1 导电墨水材料
1-乙基-3-甲基咪唑硫酸乙酯离子液体具有高导电率、低毒性以及低挥发性等优点,十分适合作为柔性传感器的导电墨水材料[15]。其化学参数见表1。

表1 1-乙基-3-甲基咪唑硫酸乙酯的参数
1.1.2 柔性基底材料
Ecoflex硅胶为无色半透明状,十分柔软,弹性和拉伸性非常好,最大断裂伸长率可达900%,适合作为柔性传感器的柔性基底材料。选用的具体型号为Smooth-On Ecoflex 00-30 铂催化硅胶,黏度为1.24 g/cm3。
1.1.3 硅胶增稠剂
由于00-30 铂催化硅胶黏度较小,不具备保形性。经过实验发现,其作为外通道流体材料不能束缚内通道离子液体的形态,同轴挤出时离子液体极易流出。因此需要添加硅胶增稠剂来增加其黏度,本文选用的增稠剂型号为Smooth-On THI-VEX。
1.2 同轴打印设备
本文设计了一种双活塞同轴针头挤出系统,如图1所示,可安装在三维移动平台上进行打印。

图1 双活塞同轴挤出系统
注射器针头使用可拆卸式同轴针头,这类针头的特点是方便清洗及反复使用。针头一般有4个主要尺寸参数,分别为内通道内径IID、内通道外径IOD、外通道内径OID、外通道外径OOD。主要参数见表2。

表2 同轴针头尺寸参数 mm
1.3 性能表征方法
本文主要对硅胶包覆离子液体同轴打印成型效果以及所制传感器的电学性能进行表征。打印成型效果通过人眼和工业电子显微镜进行评判。人眼可以观察打印线条是否连续,一致性是否好;电子显微镜可以测量打印横截面,评判同轴度和打印精度。传感器电学性能主要包括灵敏度、迟滞性以及重复性,通过万能拉力试验机和自制的阻抗检测系统进行各种性能参数的测试。
2 同轴打印工艺参数优化研究
采用的柔性传感器的3D打印步骤如下:先根据传感器形状大小制作模具,在模具中浇入硅胶,然后针头嵌入硅胶中进行打印得到传感器实体。这种嵌入式打印的优点在于提前浇注的硅胶可以为打印提供悬浮支撑,保持打印线条的圆度和同轴度,从而获得较好的打印质量。打印示意图如图2所示。

图2 同轴打印过程示意图
2.1 外通道挤出流量的影响
针头外通道内是包覆离子液体的硅胶,其挤出质量直接影响传感器性能。当外通道挤出流量Qout较小时,无法完整包覆离子液体,将致使离子液体溢出;当Qout较大时,硅胶会在针头口呈喷射状挤出而导致较大的形状尺寸误差。
Qout选择为40、55、70、85、100、115、130 μL/min时各打印了一段U型路径,效果如图3所示。实验时其他打印参数保持一致,内通道离子液体挤出流量设置为Qin=14 μL/min,针头尖部距离模具底的高度为H=1 mm,针头移动速度vm=1.0 mm/s。

图3 不同Qout下的打印效果
可以看出,在Qout小于55 μL/min时,外通道硅胶出现了不同程度的破损,离子液体溢出了内通道。当Qout=70~115 μL/min时,打印线条的外通道硅胶都能包裹住离子液体,轮廓清晰,尺寸精度较好;当Qout过大时,其打印路径出现明显的扭曲,因为此时流速过高,硅胶挤出呈不可控的喷射状态。因此针对本文选用的针头以及其他打印参数而言,较为理想的外通道挤出流量范围为70~115 μL/min。
2.2 内通道挤出流量和针头移动速度的影响
内通道挤出流量Qin直接影响离子液体直径。Qin较小时,离子液体挤出量不足,由于离子液体本身的黏性可能导致不连续;Qin较大时,内通道离子液体可能溢出。此外,针头移动速度vm同样直接影响离子液体直径。
为保证Qin较大时硅胶通道不发生破坏,Qout取较大值115 μL/min;打印高度H为0.8 mm。Qin分别为8、10、12、14、16、18、20 μL/min,vm分别取为0.5、1.0、1.5 mm/s。当针头移动速度为1 mm/s时,离子液体内通道直径变化如图4所示。

图4 不同Qin下的同轴打印线条横截面图
图4表明:随着内通道挤出流量增大,离子液体直径明显增加。为研究针头移动速度和内通道挤出流量对挤出线条直径的影响,进行多个参数下的打印实验,通过电子显微镜测量离子液体直径绘制成图5。
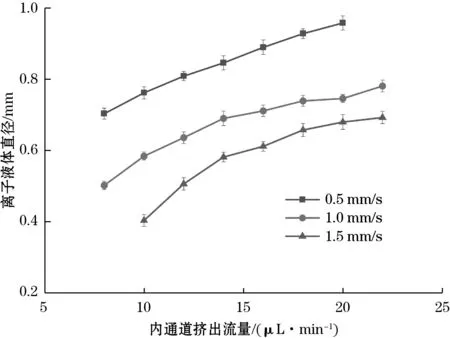
图5 同轴打印线条硅胶外径测量实验结果
由图5可知,针头移动速度增大将导致离子液体半径减小。当移动速度为0.5 mm/s时、内通道挤出流量为20 μL/min时打印精度已不能满足要求;移动速度为1.5 mm/s、内通道挤出流量为8 μL/min时离子液体就已经出现断路现象。因此打印时可以参考上述参数选择。
2.3 针头高度的影响
同轴的离子液体打印需要保持较好的内外层同轴度,以获得更好的包覆效果。硅胶材料较软,打印完成无法迅速固化,并且硅胶由于受到挤压,在挤出时会产生膨胀,因此需要通过实验测得最佳的打印高度。
选定外通道挤出流量为100 μL/min、内通道挤出流量为14 μL/min、针头速度为1.0 mm/s。打印高度从0.3 mm增加到1.0 mm,效果如图6所示。

图6 不同打印高度H下的同轴打印效果
当打印高度H为0.3~0.7 mm时,同轴打印线条会受到一定的挤压和刮蹭,外层硅胶发生破裂致使离子液体发生泄漏;当H为0.8~1.0 mm时,同轴打印线条截面有较好的圆度和同轴度,a/b的值接近1,且不易发生外通道破坏。
如图2所示,离子液体到模具底部的距离为h,由于重力和针头挤压影响,线条截面一般为椭圆形,离子液体的半长轴为a,半短轴为b。通过a/b的值来评判离子液体的打印尺寸精度,a/b越接近1说明打印线条的精度越好。不同打印高度下,测量其a/b和h,绘制成折线图如图7所示。
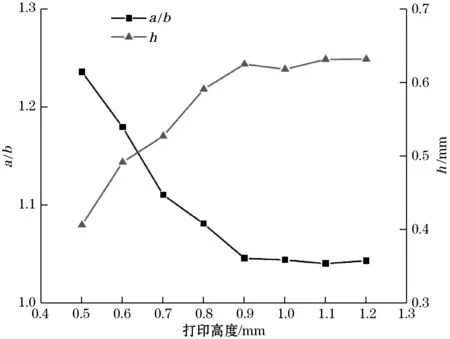
图7 打印高度对打印线条打印精度的影响
由图7可知,随着打印高度增加,在一定范围内(H=0.5~0.9 mm),a/b呈现减小的规律,表明内通道离子液体的打印精度越来越高;当H>0.9 mm时,同轴打印线条不再受到针头的挤压效果,a/b不再随着打印高度的增加而减小。
打印线条的整体密度要大于硅胶基底的密度,因此打印线条会下沉至模具底部。理论上,H>0.9 mm的高度都能获得较好的同轴度,但是打印高度依然不能无限制增大,太高会导致打印线条在下沉时可能偏离预设路径。因此,为提高柔性传感器的打印精度,高度应选为0.9~1.0 mm。
3 柔性应变传感器原理与制作
3.1 传感器应变与阻抗变化关系
本研究的传感器属于电阻式传感器,阻抗Z(Ω)的计算公式为
(1)
式中:ρ为离子液体的电阻率,S/m;L为内通道的长度,m;Amin为内通道横截面积,m2。
假设传感器内通道截面为圆形,那么可以得到未经拉伸时传感器的阻抗Z0计算公式为
(2)
式中:L0为内通道长度,m;R0为柔性应变传感器未拉伸时内通道横截面的半径,m。
由于离子液体具有不可压缩性,假定拉伸过程中截面始终保持圆形,可以得到经拉伸产生ε应变后的传感器阻抗Z1的计算公式为
(3)
因此,离子液体柔性应变传感器阻抗变化率与应变的关系为
(4)
通过式(4)可知,传感器阻抗变化率为应变的二次函数。
3.2 柔性应变传感器的制作
设计了2种不同路径的柔性应变传感器进行对比,分别命名为柔性应变传感器1和柔性应变传感器2,如图8所示。其中传感器1的应变主要为轴向应变,传感器2的应变主要为径向应变。

(a)传感器1

(b)传感器2图8 柔性应变传感器路径
银电极具有极高的导电性且易制作和抛光,适合作为电阻型柔性传感器的电极。在离子液体柔性应变传感器打印完成后,采用银电极对其进行进一步的封装。本文采用的传感器封装工艺如下:首先将银电极轴向嵌入到传感器内通道中;然后用加了硅胶增稠剂的硅胶材料在端口进行涂裹,保证传感器的封装强度;最后在60 ℃环境中加热10 min,加速涂裹硅胶固化。
4 柔性应变传感器性能测试
4.1 灵敏度测试
灵敏度是衡量柔性应变传感器性能十分重要的参数,对于离子液体柔性应变传感器,可用应变系数GF表示其灵敏度,应变系数越高,其灵敏度越高,计算公式如下:
(5)
式中:Z0为传感器未拉伸时的阻抗值,Ω;Z为传感器当前阻抗值,Ω;ε为传感器受到的拉伸应变。
在本次实验中,将柔性应变传感器从0拉伸到100%并记录传感器的阻抗值,实验得到柔性应变传感器在不同应变情况下的阻抗变化率如图9所示。将实验得到的数据进行二次曲线拟合,柔性应变传感器1和柔性应变传感器2的拟合评价系数R2分别为0.998 9和0.998 8,表明拟合曲线与试验数据拟合程度高。
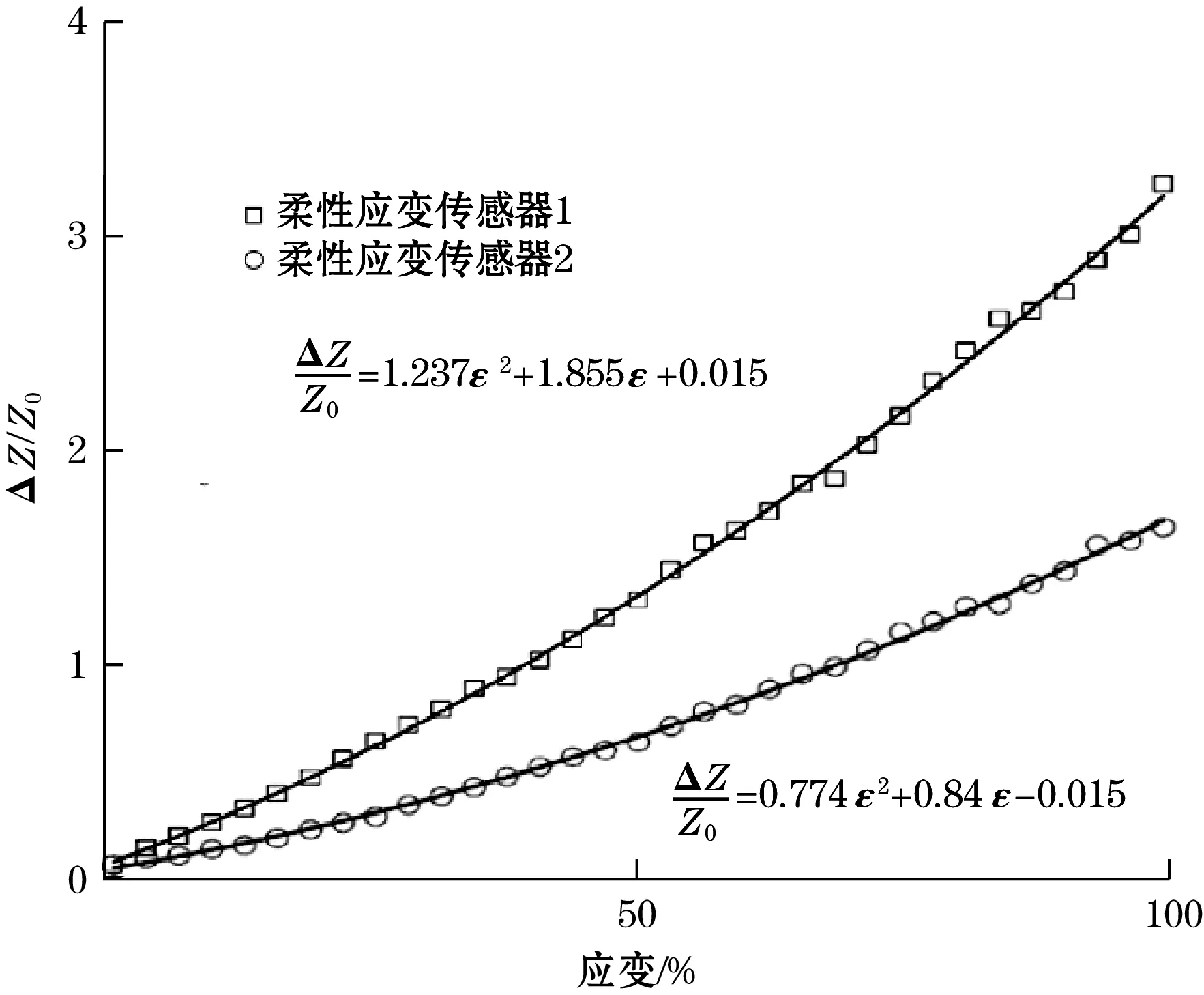
图9 柔性应变传感器的灵敏度实验结果
从图9可知,柔性应变传感器1以及传感器2的阻抗变化率都随应变增加而增加,且通过拟合曲线来看,其阻抗变化率的增加越来越快。根据图9可以得到传感器应变系数与应变之间的关系:
GF1=2.474ε+1.855
(6)
GF2=1.548ε+0.84
(7)
式中:GF1为传感器1的应变系数;GF2为传感器2的应变系数。
根据以上分析可知,在应变0~100%内,随着应变增加,柔性应变传感器2阻抗变化率的增加量要小于柔性应变传感器1,传感器1的应变系数为1.855~4.329,而传感器2的应变系数为0.84~2.388,故传感器1的灵敏度要高于传感器2的灵敏度。原因在于:柔性应变传感器在拉伸时,传感器1的内通道以轴向拉伸为主,传感器2的内通道以径向拉伸为主,而柔性应变传感器轴向拉伸对阻抗的改变量会大于径向拉伸,所以在相同拉伸应变下,传感器1阻抗变化率大于传感器2阻抗变化率,从而灵敏度更高。对比其他研究中的离子液体柔性应变传感器,其应变系数在0~100%应变下为1.7~3.08[16-17],本实验制作的离子液体柔性应变传感器与其相近,能满足实际应用的要求。
4.2 迟滞性测试
柔性应变传感器的迟滞性是指在传感器拉伸和回弹期间,应变-阻抗变化率特性曲线的不重合度。对于相同大小的应变,在柔性应变传感器拉伸和回弹过程中,对应两个不同的阻抗以及阻抗变化率,通过实验找出相同应变下阻抗变化率的最大差值,然后求出柔性应变传感器的迟滞误差:
(8)
式中:γE为柔性应变传感器的不重合度;ΔEmax为相同应变下阻抗变化率的最大差值;Ymax为当前拉伸回弹过程中阻抗变化率的最大值。
为了研究柔性应变传感器的迟滞特性,将传感器从0应变拉升到100%应变,然后释放拉伸载荷,使应变从100%回弹至0,通过阻抗检测系统记录传感器的阻抗值,迟滞特性测试结果如图10所示。

图10 柔性应变传感器的迟滞性实验结果
通过式(8)对2种柔性应变传感器的不重合度进行计算,得到传感器1以及传感器2的迟滞误差分别为0.043、0.038。结果表明不管是柔性应变传感器1还是柔性应变传感器2都表现出低迟滞性,且离子液体柔性应变传感器的迟滞特性与离子液体内通道路径并无太大关系。
4.3 重复性测试
重复性是柔性应变传感器一个十分重要的特性,又称为传感器的循环稳定性。对于离子液体柔性应变传感器来说,传感器的性能失效或直接损坏主要是柔性基底材料失效引起的,特别是在较高应变的场合,长期使用后易遭受塑性变形或疲劳损伤等情况的影响。在实际应用中,传感器的性能失效或损坏可能直接导致严重的事故发生,这是绝对不允许的,因此优异的重复性对柔性应变传感器十分重要。
实验中,柔性应变传感器应变从0拉伸到100%,再从100%回弹至0,重复拉伸100次,拉伸速度为100 mm/min,记录柔性应变传感器的阻抗值,绘制其阻抗变化率与时间的关系如图11所示。

(a)应变传感器1

(b)应变传感器2图11 重复性实验结果
由图11可知,在应变0~100%的循环拉伸中,2种不同内通道路径的柔性应变传感器其阻抗变化率随时间呈现有规律的变化,多次循环后变化不大。为了更好地观察阻抗随时间变化的趋势,截取上述时间-阻抗变化曲率图的初始4个循环和末尾4个循环,如图12所示。

(a)传感器1初始循环

(b)传感器1结束循环

(c)传感器2初始循环

(d)传感器2结束循环
可以看到,传感器经过100次的拉伸循环依然保持很好的稳定性,响应幅值稳定在很小的范围,在可接受的误差区间。这表明离子液体柔性应变传感器在100%大应变循环拉伸中具有很好的拉伸重复性,性能稳定。
5 结束语
本文提出了3D同轴打印柔性传感器的成型方法,将离子液体与硅胶通过同轴打印设备挤出成型,制备出高可拉伸的应变传感器。本文根据离子液体和硅胶的物理特性,研究了一套最佳打印参数。当外通道挤出流量为70~115 μL/min,内通道挤出流量为10~20 μL/min,针头移动速度为0.5~1.5 mm/s,针头高度0.8~1.0 mm时,打印同轴度和精度较好,且硅胶层不易破裂。通过实验测试表明:所制传感器应变范围大于100%,迟滞误差较低(约为0.04),多次循环后仍具有较好重复性,且轴向拉伸的传感器具有更大的灵敏度(1.855~4.329)。本文所制传感器基本满足柔性应变传感器应用要求,初步证明了该工艺方法的可行性。
