新型三叉式万向联轴器系统的横向振动特性分析
2022-07-27侯占威邢永海高志远徐雨田李松梅
侯占威,邢永海,高志远,徐雨田,李松梅
(青岛科技大学 机电工程学院,山东 青岛266061)
万向联轴器利用其机构特点,使两个轴可以不在一个轴线上,存在轴线夹角的情况下实现所联接的两轴连续回转,并能可靠传递运动和转矩[1-3]。联轴器系统由于加工装配和结构误差等原因,会产生振动,从而影响机械设备的稳定性。
国内外对万向联轴器做了许多振动方面的研究。田耀宗等[4]在研究运动梁的横向运动中发现运动梁的转速以及方向是影响转轴横向振动稳定性的主要因素;冯昌林等[5]在万向铰传动偏斜轴系横向振动的研究中,发现增大轴长、增大支撑刚度系数、增大从动轴转动惯量,均会使系统在固有频率附近产生共振;朱拥勇等[6]对万向铰角速度波动引起的振动以及运动失稳进行研究,对和型组合共振与差型组合共振进行了稳定性分析,对偏斜旋转轴进行了横向振动响应仿真;汤澍等[7]编写abaqus脚本对十字轴式万向联轴器叉头进行建模和优化,并基于优化方法,设计新型万向联轴器叉头,提高了联轴器叉头强度;FARZAD等[8]研究了万向节的动力传输特性,并提出了一些实用方法来提高其效能,通过初步推导出与万向节有关的运动方程,详细阐述了转速和通过中间轴传递的扭矩振荡行为;WANG 等[9]在研究万向节时发现随着滑杆关节角或旋转半径的增大或输入轴频率的增加,增加了滑杆的相对位移,而且增加了输入轴沿旋转方向的周期振荡;徐翔等[10]利用第一类Lagrange方程建立了万向联轴器非线性扭转振动方程得到了夹角在小于20°时的情况下可忽略夹角进行扭振计算;黄山等[11]对索道驱动装置中的十字万向联轴器进行预应力模态分析,并对联轴器进行了临界转速校核,证实了在正常工作状况下,不会出现共振现象。目前大部分研究主要针对的是传统的联轴器的传输特性、强度、振动、以及优化,对于新型联轴器的研究较少,目前对于新型三叉式联轴器横向振动的研究还不够深入,考虑到新型三叉式万向联轴器横向振动对机械系统所造成的影响,本研究将新型三叉式联轴器与球笼式联轴器联合,进行横向振动对比分析,以期为新型联轴器的推广应用提供理论依据。
1 新型三叉式万向联轴器结构
新型三叉式万向联轴器是本课题组发明研制的拥有自主知识产权的等角速万向联轴器,由输入轴、连接盘、滑块组件、三叉杆和输出轴组成[12]。输入轴与连接盘一端相连接,连接盘另一端为三叉结构,三叉槽内部安装有滚珠,将直线轴承的原理应用到此结构中。在联轴器运转过程中,将输入轴与输出轴之间的滑动变为滚动,降低了摩擦,提升了运转稳定性,并通过滑块内部滚珠,实现输出轴与输入轴的角度偏移,其三维模型如图1所示。

图1 新型三叉式万向联轴器结构图Fig.1 Structure of new type tripod universal coupling
2 建立新型三叉式万向联轴器双联系统横向振动模型
将球笼式与三叉式万向联轴器安装在一套传动系统中,可以提高输出轴运转稳定性[13-14]。整个转轴系统包括:输入轴、三叉式联轴器、中间轴、球笼式联轴器、输出轴,整个系统的模型简化模型如图2所示。
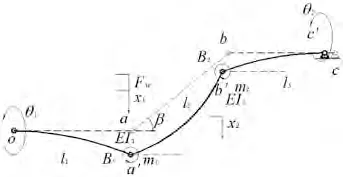
图2 新型三叉式万向联轴器双联系统横向振动简化模型Fig.2 Simplified lateral vibration model of double universal joint of tripod and ball cage
o点为输入轴的起点,且位置不变,直线oa、ab和bc分别代表初始状态时输入、中间和输出轴,直线oa′、a′b′和b′c′分别为发生横向振动位移后的输入、中间和输出轴位置。a和a′代表新型三叉式万向联轴器,b和b′代表球笼式万向联轴器,b′代表输出轴的末端,转动后受到万向联轴器的附加弯矩后发生了位移,利用集中质量法,将质量集中到a′和b′点上,具体为输入轴与三叉式进行集中质量,中间轴与球笼式联轴器集中质量。假设初始状态时,输入轴与输出轴轴线平行,位移方向为a点和b点的竖直位移。i取1,2。
利用动力矩阵方程,根据图2,建立该系统的动力学方程:式(5)中:Z为柔性变形矩阵,f11为输入轴挠曲线方程,f12f21为输入轴、中间轴、输出轴挠曲线方程,f22为中间轴与输出轴挠曲线方程,当输入轴与中间轴夹角β为0°时,根据文献[15]得到式(6):

式(7)中S2为中间轴直径,当β为0°时的横向振动方程如式(8)所示。

根据公式(9),求得固有频率在横振系统中分别为757和335 rad·s-1。
输入轴与中间轴夹角为β=10°时,新型三叉式联轴器产生附加弯矩B1,如式(10)所示
式(10)中,T1取值200 N·m,球笼式附加弯矩B2=0 N·m。
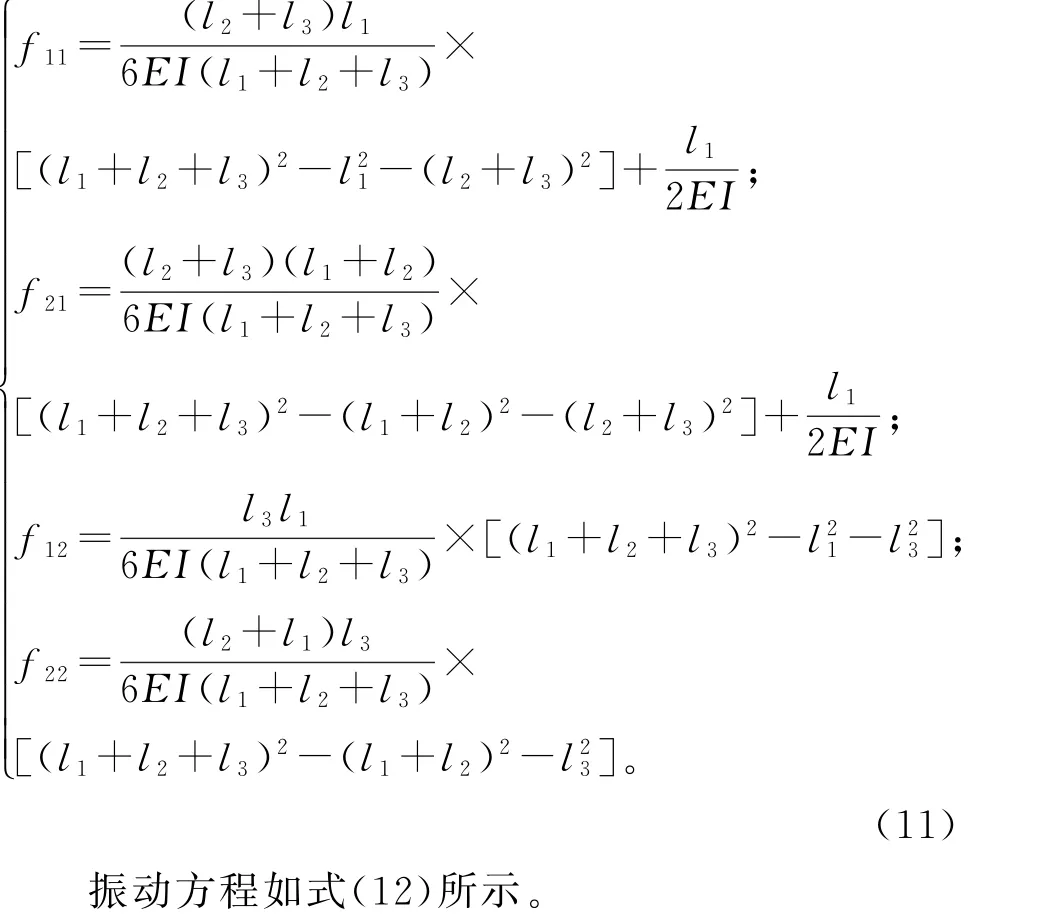
附加弯矩对双联系统产生影响,根据材料力学挠度计算方程,式(6)改为式(11):
3 双联系统的横向振动固有频率及响应分析
3.1 考虑重力的固有频率及响应分析
取m1=5 kg,m2=7 kg,l1=0.4 m,l2=0.4 m,l3=0.4 m,通过Runge-Kutta算法对式(7)进行计算,设定输入轴角速度2πm·s-1,设定MATLAB仿真步长为10-4s,仿真时间10 s。
由图3(a)可知,输入轴与中间轴夹角为0°,三叉式位移量以1×10-4m 为对称轴上下波动,10 s内位移波动振幅为1×10-4m,变化量趋于平稳,位移最大值和最小值分别在2×10-4,0 m;由图3(b)可知,球笼式位移量以8×10-5m 为对称轴上下波动,10 s内位移波动振幅为9×10-5m,变化量趋于平稳,位移最大值和最小值分别为1.7×10-4,0 m;由图4(a)可知三叉式横向振动速度以0 m·s-1为对称轴上下波动,10 s内速度波动振幅为0.045 m·s-1,其绝对值从0.035 m·s-1增大到0.045 m·s-1,有逐渐增大趋势,速度最大值和最小值分别为0.045,-0.045 m·s-1;由图4(b)可知,球笼式速度以0 m·s-1为对称轴上下波动,10 s内波动振幅为0.035 m·s-1,其速度绝对值从0.28 m·s-1增大到0.35 m·s-1,有缓慢增加趋势,速度最大值和最小值分别为0.035,-0.035 m·s-1。由于三叉式联轴器与输入轴直接连接,三叉式的横向振动位移和速度都大于球笼式,由图5可得固有频率分别为53.3,120.5 Hz,转化为转速分别为333,757 rad·s-1,与公式法求得固有频率相同,验证计算准确性。
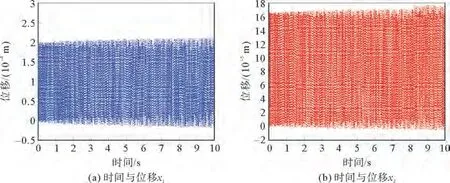
图3 夹角0°万向联轴器系统横向位移随时间变化Fig.3 Change of lateral displacement of universal coupling system with 0°included angle with time
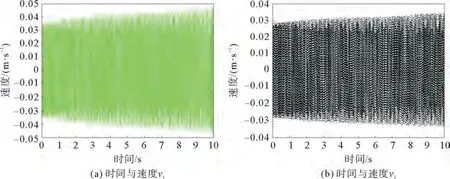
图4 夹角0°万向联轴器系统横向速度随时间变化Fig.4 Lateral velocity of the 0°joint system with angle changing with time
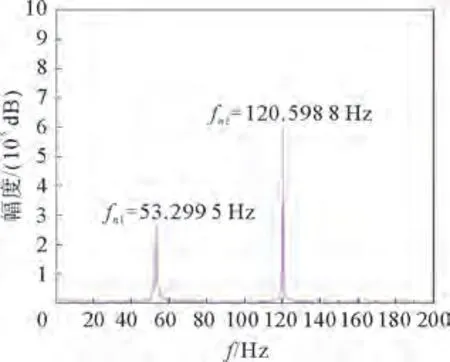
图5 夹角0°万向联轴器系统横向振动固有频率Fig.5 Natural frequency of lateral vibration of universal coupling system with 0°included angle
输入轴与中间轴夹角为10°时,由图6(a)可知,三叉式位移量以3×10-4m 为对称轴上下波动,10 s内位移波动振幅为2.5×10-4m,变化量趋于平稳,位移最大值和最小值分别在5.5×10-4,0 m;由图6(b)可知,球笼式位移量以2.5×10-4m 为对称轴上下波动,10 s内位移波动振幅为2.5×10-4m,变化量趋于平稳,位移最大值和最小值分别为5.3×10-4,0 m;由图7(a)可知三叉式横向振动速度以0 m·s-1为对称轴上下波动,10 s内速度波动振幅为0.06 m·s-1,其绝对值从0.06 m·s-1增大到0.065 m·s-1,有逐渐增大趋势,速度最大值和最小值分别为0.065,-0.065 m·s-1;由图7(b)可知,球笼式速度以0 m·s-1为对称轴上下波动,10 s内波动振幅为0.08 m·s-1,其速度绝对值从0.056 m·s-1增大到0.08 m·s-1,有缓慢增加趋势,速度最大值和最小值分别为0.08,-0.08 m·s-1;由图8所示,此时固有频率为33.89,148.6 Hz,可转化为212.9,933.7 rad·s-1。
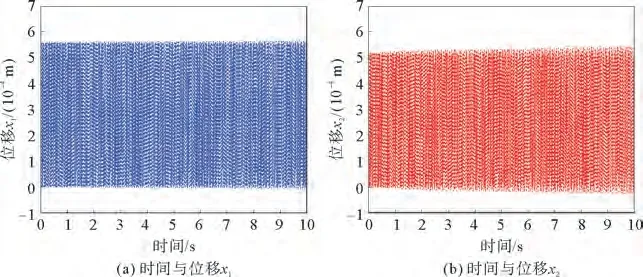
图6 夹角10°万向联轴器系统横向位移随时间变化Fig.6 Change of lateral displacement of universal coupling system with 10°included angle with time
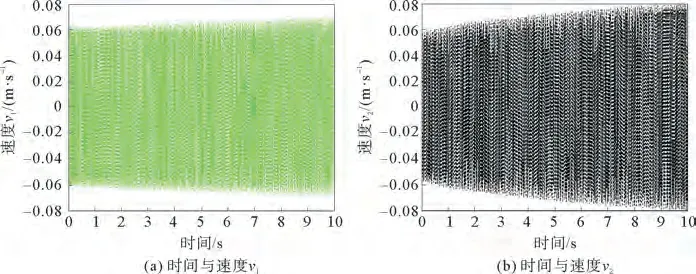
图7 夹角10°万向联轴器系统横向速度随时间变化Fig.7 Lateral velocity of the 10°joint system with angle changing with time
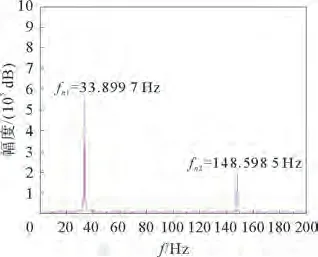
图8 夹角10°万向联轴器系统横向振动固有频率Fig.8 Natural frequency of lateral vibration of universal coupling system with 10°included angle
从图3到图8可知,随着夹角增大,三叉式与球笼式双联系统中,横向振动位移对称轴以及振幅都随之增大,由于三叉式联轴器与输入轴直接连接,球笼式变化幅度均小于三叉式;横向振动速度变化曲线对称轴依然为0 m·s-1,振动幅度随之增大。根据式(9)夹角的存在对三叉式产生附加弯矩,由于附加弯矩只存在在三叉式上,三叉式受到的影响大于球笼式,输入轴与中间轴夹角不能过大,最好不要超过20°。
3.2 系统受外激励影响
外界激励作为干扰,会影响系统的正常运行[16-17]。本研究通过施加外部激励作用在三叉式联轴器,对系统横向振动位移和速度进行对比分析。对此,设定夹角β值为10°,设定外激励Fw随时间t取值依次增大,分别为50 sin(100t),100 sin(100t)和150 sin(100t)。系统的横向振动方程[18]可写成式(13),仿真分析时,系统的横向振动速度和位移如图9和图10所示。
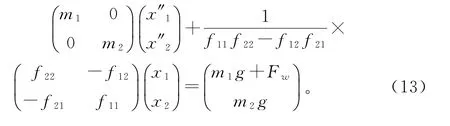
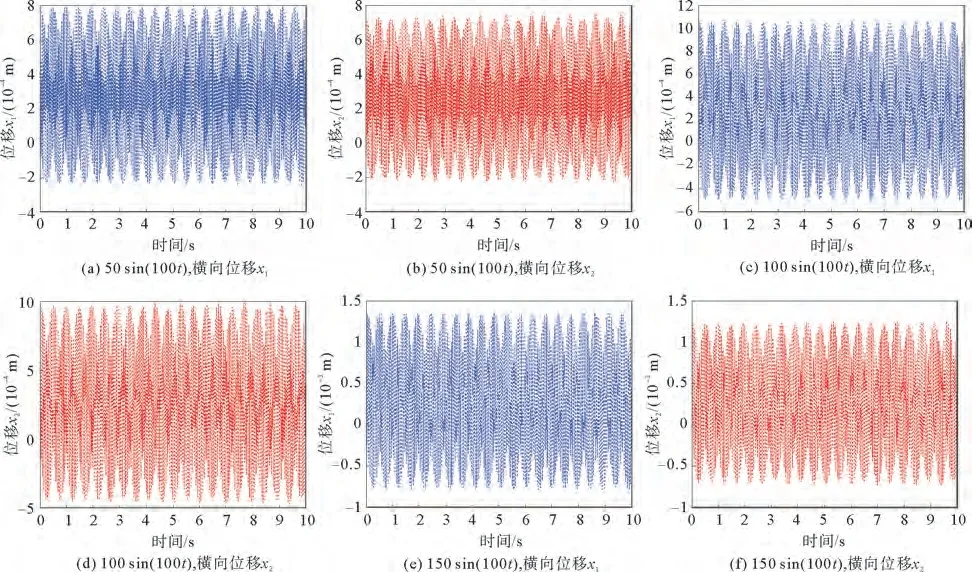
图9 3种外激励下万向联轴器系统的位移随时间的变化Fig.9 Displacement of universal coupling system under three kinds of external excitation changes with time
根据图9显示,三叉式与球笼式横向振动均以3×10-4为中心上下波动,当外激励Fw分别取上述值时,对应的新型三叉式万向联轴器的位移最大值分别为8.05×10-4,1.053×10-3,1.32×10-3m,球笼式万向联轴器的位移量最大值分别为7.23×10-4,9.93×10-4,1.31×10-3m。
根据图10显示,新型三叉式万向联轴器和球笼式万向联轴器的横向振动速度均以0 m·s-1为中心来回波动,且波动幅度保持稳定,波动形状近似于简谐振动,当外激励分别取50 sin(100t),100 sin(100t),150 sin(100t)时,与之对应的新型三叉式万向联轴器的速度最大值分别为0.092,0.132,0.165 m·s-1,球笼式万向联轴器的速度最大值分别为0.105,0.135,0.172 m·s-1。
从图9、图10看出,增大输入外激励的幅值,不会改变新型三叉式与球笼式万向联轴器的横向振动位移、速度波动中心,但位移变化幅值与速度变化的幅值在仿真时间内都随着输入外激励的增大而增大。

图10 3种外激励下万向联轴器系统的速度随时间的变化Fig.10 Speed variation of universal coupling system under three kinds of external excitation changes with time
根据力学关系与公式(12),改变施加三叉式与球笼式双联系统输入轴上的作用力可以改变整个横振系统上的作用力。由于外激励作用于三叉式联轴器上,三叉式受到外激励影响比球笼式明显,因此车辆行驶不能过于颠簸,以免横振加剧。在输入外激励最大值150 sin(100t)时,系统横向振动与速度都相对稳定。
3.3 输入轴角速度因素影响
由于固有频率最小值为212.9 rad·s-1,约为33.89 Hz,接近车辆的最大角速度,因此需要多取一些角速度进行考察。
输入 轴 角 速 度 分 别 设 定 为15π、30π、45π rad·s-1,幅值为50 N,另外激励与输入轴角速度相同,仿真时间内双联系统横向振动位移与速度变化如图11与图12所示。
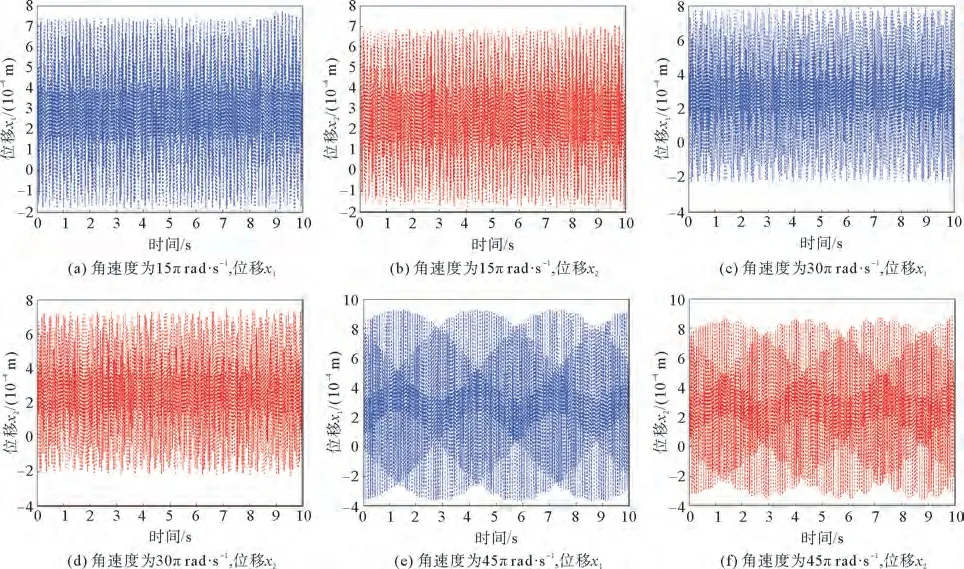
图11 3种角速度下万向联轴器系统的位移随时间的变化Fig.11 Displacement of universal coupling system under three kinds of angular velocity changes with time

图12 3种角速度下万向联轴器系统速度随时间的变化Fig.12 The velocity of universal coupling system under three kinds of angular velocity changes with time
如图11 显示,当输入轴的角速度ω分别取15π、30π、45πrad·s-1时,新型三叉式万向联轴器横向振动中心分别为2.8×10-4、3×10-4、3×10-4m,球笼式万向联轴器横向振动中心分别为2.8×10-4、3×10-4、2.2×10-4m。随着角速度的增大,波动幅度较平稳略有高低起伏,与之对应的新型三叉式万向联轴器的位移最大值分别为7.4×10-4、7.85×10-4、9.21×10-4m,球笼式万向联轴器的位移最大值分别为6.83×10-4、7.28×10-4、8.65×10-4m。
如图12显示,新型三叉式万向联轴器和球笼式万向联轴器的横向振动速度曲线以0 m·s-1为中心来回波动,随着角速度的增大,波动幅度从较平稳到略有高低起伏。当输入轴的角速度ω分别取15π、30π、45πrad·s-1时,与之对应的新型三叉式万向联轴器速度的最大值分别为0.074 2、0.087 7、0.122 0 m·s-1,球笼式万向联轴器速度曲线最大值分别为0.079 7、0.092、0.126 0 m·s-1。
分析图11与图12,角速度分别设定为15π、30π和45πrad·s-1,球笼式万向联轴器横向振动速度大于三叉式,横向振动位移小于三叉式,都随着输入轴角速度的增大而增大。角速度在45πrad·s-1时,三叉式与球笼式横向振动位移与速度出现规律性波动,但整体波动相对稳定。由此可以得出,当角速度接近横振固有频率时,固有频率对该系统影响依然较小。
双联系统受三叉式外力频率影响,三叉式作为输入轴,三叉式角速度变化与输入轴角速度变化相同。根据公式(12)计算得出,当输入轴转速达到3 000 r·min-1,接近了横振固有频率,为了防止发生共振现象,应避免联轴器超速运行。
4 结 论
对应用在前置后驱汽车上的新型三叉式-球笼式双联万向联轴器输入轴与中间轴0°和10°时进行了固有频率和响应分析,重点研究了外激励和输入轴角速度对新型三叉式-球笼式双联万向联轴器横向振动系统的影响。
1)三叉式与球笼式双联系统中,三叉式与球笼式分别作为输入轴与输出轴,整个双联系统受输入外激励的幅值改变以及输入轴角速度的影响,外激励幅值依次设定为50 sin(100t)、100 sin(100t)、150 sin(100t),由于三叉式联轴器作为外激励的输入端,以及球笼式与三叉式中间的中间轴的作用,球笼式受到的影响低于三叉式,但横向位移和速度变化量都随外激励与转速的增强而增强;
2)通过对输入轴施加不断增大的角速度,依次设定15π、30π和45πrad·s-1,分析整个双联系统振动稳定性,通过计算与仿真求得横向振动固有频率,当输入轴角速度增大到系统横振固有频率时,横向振动位移与速度都相对稳定。
