一种基于卡尔曼滤波和序贯概率比检验的空气弹簧泄漏故障预警方法*
2022-07-20薛明晨
杨 俊 薛明晨 祁 成
(南京中车浦镇海泰制动设备有限公司, 211899, 南京∥第一作者, 高级工程师)
0 引言
空气弹簧系统(以下简称“空簧系统”)[1-3]作为城市轨道交通车辆关键子系统之一,主要由AS(空气弹簧)、差压阀、高度阀等部件组成,是维持车体平衡稳定的重要部件。目前空簧系统的相关故障诊断方案较为简单,这种比较原始的故障检测方案不仅耗费了大量的人力物力,而且也不能捕捉相关部件可能存在的逐步耗损的过程。
针对这种问题,可以考虑通过一些智能算法来检测空气弹簧压力,进而间接判断出空簧系统是否存在故障。目前,采用智能算法检测空簧故障的案列少之又少。而智能算法已经成功运用于存在泄漏故障的其他行业,如文献[4]将SPRT (序贯概率比检验)应用于管道轻微泄漏,并验证了SPRT在检测小泄漏信号中的可行性。文献[5]考虑到若单独采用SPRT检验原始压力信号,对于一些复杂的工况而言,其检验仍达不到满意效果,因此采用卡尔曼滤波[6-7]突出原始压力信号的拐点,并将处理得到的整条新息(卡尔曼滤波算法中测量方程的测量值与系统预测值的差值)信号作为SPRT的输入,这两种算法的有效结合取得了良好的检测效果。然而,这种方法是提取离线数据的整条新息序列,并不能达到在线监测的要求。
综上所述,本文提出一种基于卡尔曼滤波和SPRT的方法,用以检验空簧系统是否出现故障。该法不仅可对一些有轻微泄漏的故障进行及时的故障预警,而且可采用序列化新息输入的方式进行在线故障检测。该方法首先将同一转向架的两个空簧压力进行求和后求其平均值;然后,采用卡尔曼滤波算法对取均值后的空气弹簧压力进行滤波处理,得到当前时刻的新息;最后,将标准化后的新息作为SPRT的输入,通过SPRT检验当前时刻空簧系统是否出现故障。若无故障或不满足SPRT作出判断的条件,循环更新,判定下一时刻是否出现故障。本文所提算法的有效性在某地铁运营车辆的采集数据中得到了验证。该方法用于空簧系统相关部件的故障检测有利于减少误报,降低了维修成本。
1 城市轨道交通车辆空簧系统的工作原理和失效机理
空簧系统主要由空气弹簧、差压阀和高度阀3个部分组成,其目的是保持列车平稳运行,给乘客带来良好的乘坐体验感。现主要对空簧系统的工作原理和失效机理进行详细描述。
1.1 空簧系统工作原理
空气弹簧作为空簧系统最重要的部件,由气囊、上盖、扣环、节流阻尼装置、辅助弹簧等组成,其结构如图1所示。其中:气囊作为空簧的核心部件,承担主要的承载和减震功能;上盖位于车体或摇枕下方,起密封和传递载荷的功能;扣环位于上盖与气囊之间,起密封和连接的功能;节流阻尼装置与上盖进气口或支座连接在一起,起垂向阻尼作用;当气囊损坏无气时,辅助弹簧承担起主要减震及承载功能。辅助弹簧又包含应急弹簧、支座、橡胶堆和紧固螺丝等部件。

图1 空气弹簧结构示意图Fig.1 Diagram of air spring structure
1.2 空簧系统失效机理
空簧的失效机理较为复杂,大致包含4个类别:
1) 空簧气囊故障。气囊在使用中被人为或意外划伤,使得胶囊出现裂纹;气囊与上盖板之间存在压缩变形;长时间的接触磨损会使胶囊破损;长期暴露在臭氧、日晒雨淋等环境中,使得气囊出现鼓泡、龟裂现象。
2) 空簧上盖故障。由于上盖上部的橡胶垫尺寸不匹配或者上盖受力不均匀等原因导致上盖发生变形。此外,由于上盖进气口座与上盖之间螺丝松动等原因,致使上盖进气口座与上盖脱落。
3) 空簧橡胶堆、支撑座故障。由于长期的日晒、雨淋导致橡胶老化,从而使橡胶堆出现脱胶、裂纹现象。
4) 空簧节流阻尼故障。长时间浸泡在水中,致使节流阻尼装置出现生锈现象,同时可能会引起弹簧支撑座等其他配件发生故障。
2 算法原理与故障预警实现过程
2.1 算法描述
2.1.1 卡尔曼滤波
对于1个时间序列的数据,假设t时刻的真实数据为Y(t){Y∈RM},其中:R表示实数集,M表示数据的维度。设传感器的测量数据为Ym(t),当传感器测量无漂移时,Ym(t)是Y(t)的1个无偏估计,即:
Ym(t)=FY(t)+ξ1
(1)
式中:
F——当前状态到测量的转换矩阵;
ξ1——期望为0、协方差为C1的高斯白噪声。
当ξ1的方差较大时,测量数据对真实数据的估计效果不佳。因此,基于系统的原理方程:
Y(t)=AY(t-1)+Bu(t-1)+ξ2
(2)
式中:
Y(t-1)——t-1时刻的真实数据;
u(t-1)——偏置项;
A、B——均为转移矩阵;
ξ2——期望为0、协方差为C2的高斯白噪声。
由于Y(t-1)是未知的,Y*(t-1)为t-1时刻的最优估计,是已知的。假设方差为C*(t-1),因此可以得到t时刻的预测值Yp(t),它也是真实数据的另一个无偏估计:
Yp(t)=AY*(t-1)+Bu(t-1)
(3)
且可得Yp(t)的方差C+,t为:
C+,t=AC*(t-1)AT+C2
(4)
卡尔曼滤波的真正目的是根据t时刻真实数据的两个无偏估计Ym(t)、Yp(t)来得到该时刻的最优估计Y*(t)。现做如下线性假设:
Y*(t)=Yp(t)+λ(t)(Ym(t)-Yp(t))
(5)
式中:
λ(t)——卡尔曼增益。
为了使Y*(t)成为真实数据的最优估计,应使Y*(t)的方差最小。通过求解Var(Y*(t))的最小值,最终可得:
λ(t)=C+,tFT(FC+,tFT+C1)-1
(6)
Var(Y*(t))=(I-λ(t)F)C+,t
(7)
式中:
I——单位矩阵。
将式(6)代入式(5),可得到最优估计值Y*(t)。
2.1.2 序贯概率比检验
对于1个时间序列数据xi,假设其满足方差为σ2的正态分布,现需要判断该序列是否异常。设给出的原假设(系统运行正常)为H0,备选假设(系统运行异常)为H1。设μ0为H0下服从正态分布的均值,μ1为H1下服从正态分布的均值,Δμ=μ1-μ0。设α和β分别表示犯第1类错误(原假设正确却拒绝原假设)和第2类错误(原假设错误却未拒绝原假设)的概率。在H0和H1下,随机时间序列的联合概率密度为:
(8)
(9)
式中:
i——自然数序列;
n——xi的采样总次数;
P0,n——H0下n次采样的联合概率密度;
P1,n——H1下n次采样的联合概率密度。
若满足ω≥(1-β)/α,则认为随机序列的联合概率密度是P1,n的概率更大,则拒绝H0。若满足β/(1-α)<ω<(1-β)/α,则不做判断,继续观察,直到满足ω≤β/(1-α)或ω≥(1-β)/α再作出判断。
将xi进行标准化处理,并将式(8)~(9)代入β/(1-α)<ω<(1-β)/α,最终可化为递推形式:
(10)
式中:
γ(n)——经过ω变换后的第n次采样的检验参数;
γ(i) ——经过ω变换后的第i次采样的检验参数;
γ(i-1)——经过ω变换后的第i-1次采样的检验参数。
因此,实际检验时,只需计算出γ(i)的初值,即可通过递推判断系统是否异常。
2.2 故障预警的实现

卡尔曼滤波最终可得到修正序列X*(t),但实际用于SPRT检验的并不是X*(t),而是新息。定义新息e(t)为传感器测量值Xm(t)与预测值Xp(t)之差,即:
e(t)=Xm(t)-Xp(t)
(11)

将此时的e(t)作为SPRT的输入,通过序贯概率比检验即可判断当前时刻t空簧系统是否存在泄漏现象。若无泄漏,则迭代计算下一时刻的新息,并代入SPRT判断,重复此计算过程。
综上分析,采用卡尔曼滤波和SPRT实现空簧故障预警的流程如图2所示。
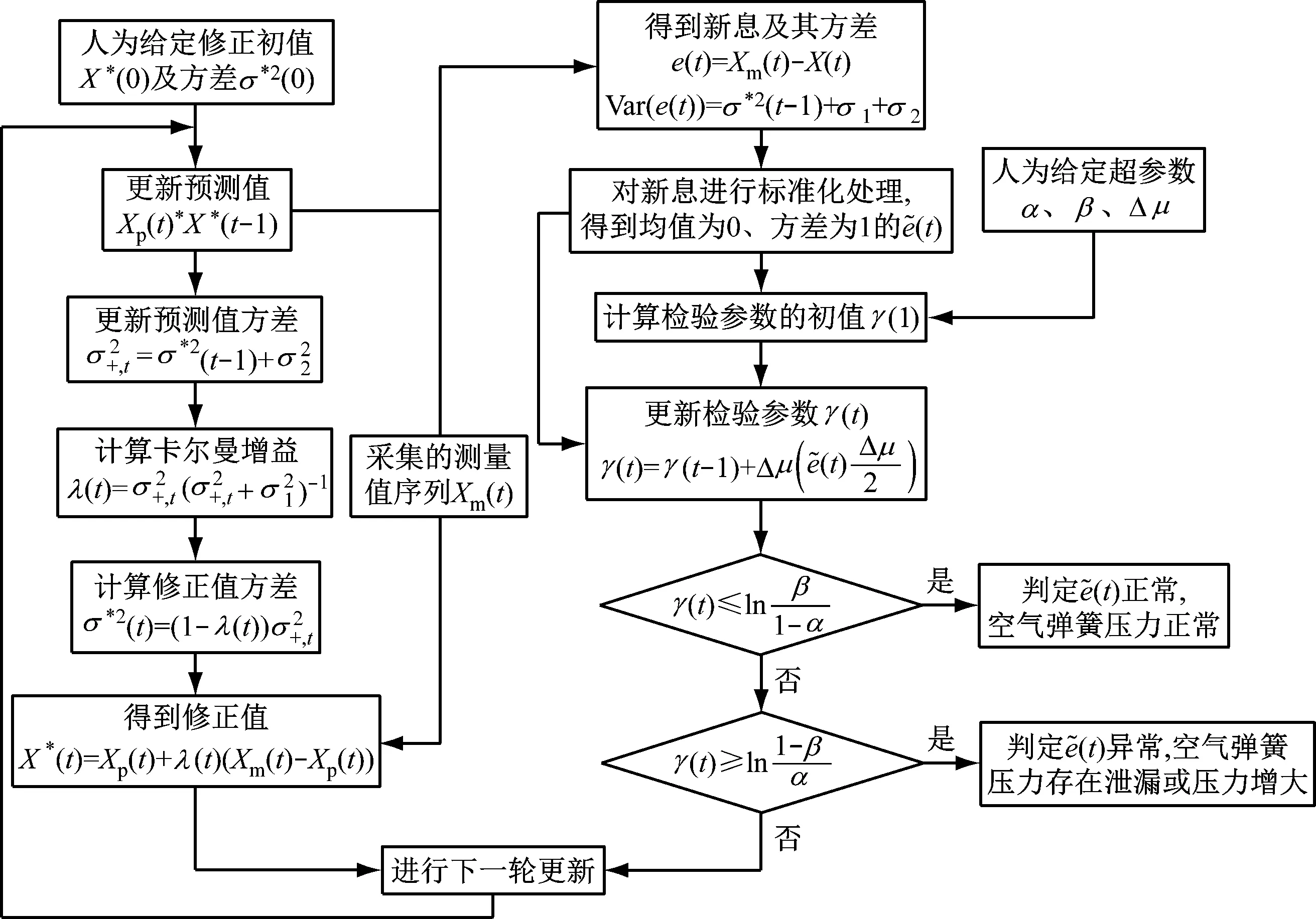
注:σ*2(t)——t时刻最优估计的方差;超参数指机器学习中在开始学习前已设置好的参数。图2 基于卡尔曼滤波和SPRT的空簧故障预警流程图Fig.2 Flowchart of air spring fault early warning based on Kalman filter and SPRT
3 数据验证
为了验证本文提出的算法的可行性,采用某地铁运营车辆上采集到的96组数据,对该算法进行验证,并采用EBCU (电子制动控制单元)逻辑检测方法与本文所提方法进行对比。
将架控控制方式下制动控制系统单侧的空气弹簧压力pAS,2代入EBCU逻辑检测,检验出1组故障,结果如图3所示。图3共有120个采样样本,A点表示在该采样时刻EBCU报出空气弹簧压力低故障。
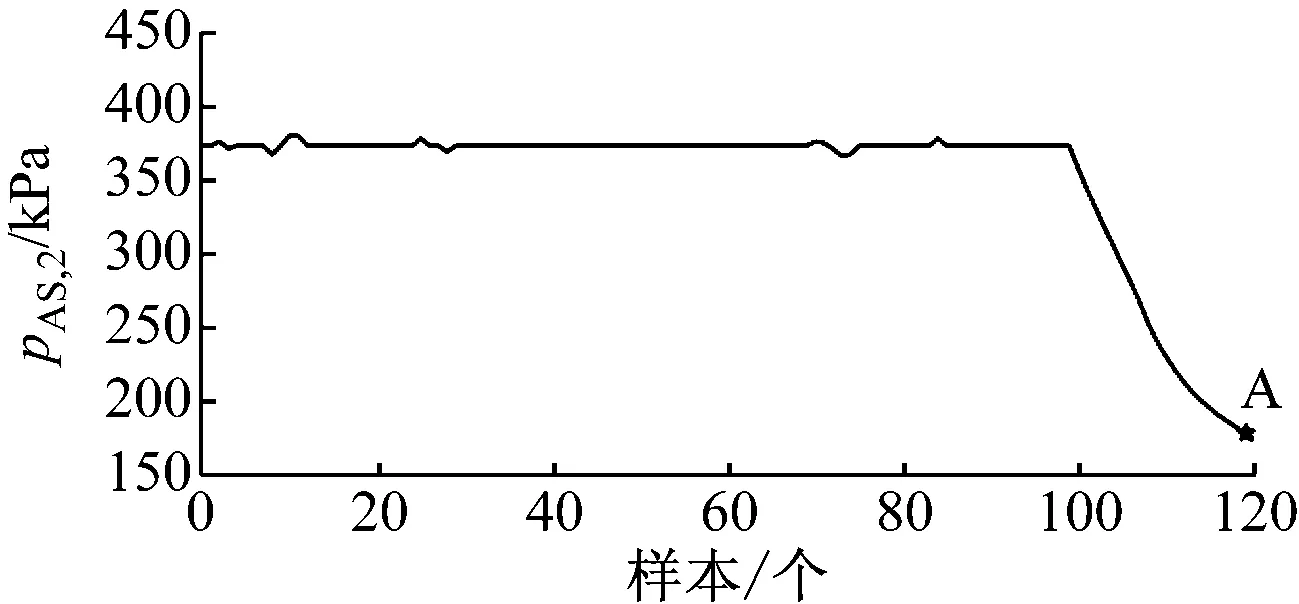
图3 基于EBCU逻辑检测方法的单侧空气弹簧压力检测结果Fig.3 Detection results of single-side air spring pressure based on EBCU logic detection mothed
设同一转向架单侧的两个空簧压力为pAS,1、pAS,2。如图4所示,从96组车辆数据中随机选取1组,得到所对应的pAS,1、pAS,2。从图4可以看出:pAS,1与pAS,2并不相等,这是由于列车过弯、乘客分布不均等原因而引起的车辆两侧质量不相等。若直接将单侧的pAS,1或pAS,2代入模型直接检验,则出现误检的可能性会很高,可能会致使检验模型失效,达不到预期目的。因此,将pAS,1、pAS,2累加后求出平均值pAS,a,将pAS,a作为模型的输入。

a) pAS,1
如图5所示,与单侧的pAS,1、pAS,2相比,均值化后的pAS,a明显更平稳,因此,采用均值化后的序列进行故障检测更为合理。

图5 均值化后得到的转向架空气弹簧压力Fig.5 The air spring pressure of bogie after averaging
将均值化后的96组数据代入卡尔曼滤波和SPRT算法进行检验,其检验结果如图6所示。图6 a)中,纵坐标表示的是将SPRT检验参数γ经过区间处理变换为-1到1之间的检测结果。当检测结果为1时,表示空簧出现故障;当检测结果为-1时,表示对空簧无故障。检测结果在-1到1之间时,表示当前时刻采样数据不作判断。图6 b)中,B、C、D为图6 a)中检验结果为1时所对应的故障点。
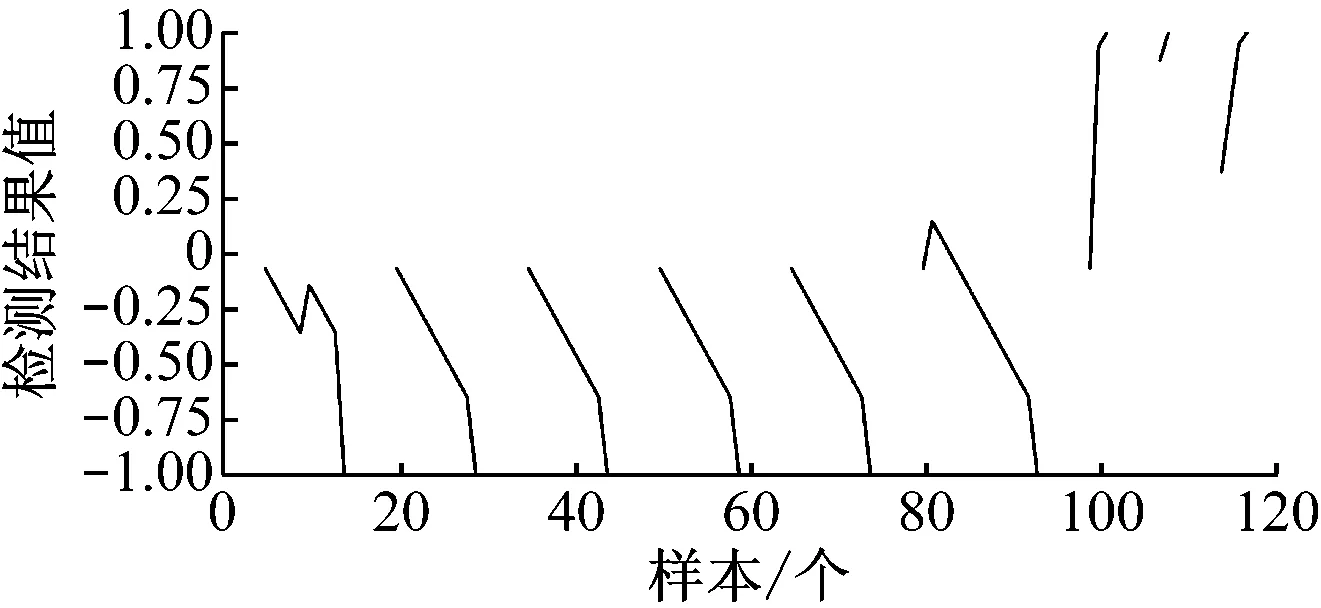
a) 检验参数γ经过区间变换后的检测结果值
从图6可以看出:样本值为100个左右时,空气弹簧压力出现持续骤降的非正常情况,表明空气弹簧发生了故障。然而基于现有EBCU检测逻辑,需要再经过20个采样点 (即样本值为120个)后,空气弹簧的泄漏量达到了报警条件,发出故障报警,存在明显的时间延迟问题。与EBCU检测逻辑相比,本文所提算法在空簧发生故障后的3个采样时刻内立即报出故障。数据验证结果表明:本文所提方法具有提前预警的功能。
4 结语
为了填补当前空簧系统故障诊断技术的空白,本文提出了一种基于序列化卡尔曼滤波和SPRT的空簧系统故障预警方法:通过卡尔曼滤波提取当前时刻空气弹簧压力的新息,将新息作为SPRT的输入,通过SPRT判定空簧系统是否存在故障。以某地铁运行车辆采集到的数据为案例,进一步验证了该故障预警方法的有效性。该方法不仅能用于现车的在线监测,还能够对轻微泄漏等故障进行提前预警,为城市轨道交通车辆空簧系统的故障诊断提供参考。