地铁全自动驾驶车辆基地自动驾驶区安全防护系统研究*
2022-07-15史时喜
史时喜
(轨道交通工程信息化国家重点实验室(中铁一院), 710043, 西安∥正高级工程师)
全自动驾驶(FAO)技术在城市轨道交通的应用越来越广泛[1],目前国内各大城市已将FAO系统建设纳入规划[2]。 为此,车辆基地将划分为人工驾驶区域和自动驾驶区域。其中,自动驾驶区域与正线一样,需纳入FAO模式管理中。列车的运行由信号系统控制完成[3-4],无需人工干预,正常运营期间不允许人员随意进入自动驾驶区域[5]。但对于列车的日常维护而言,则不可避免地需要人工驾驶完成,因此作业人员在该区域存在人车冲突的安全风险,这也造成了自动驾驶区作业人员管理的困难[6]。
目前国内建设的FAO车辆基地自动驾驶区多采用物理隔离措施,依靠人工管理的方式[7]。但该种方式存在非作业人员误入作业区域、作业人员滞留作业区域等诸多风险。针对自动驾驶区内的人员管理,本文提出一种集安全联锁控制、门禁控制、图像监控及安全警示等功能于一体的自动驾驶区安全防护系统。
1 地铁FAO车辆基地自动驾驶区设计方案
地铁FAO车辆基地主要设施一般包括停车列检库、检修库、洗车库、镟轮库、调机及工程车库等。车辆基地总图按照人工驾驶区和自动驾驶区分区布置,如图1所示。其中,人工驾驶区包括检修库、镟轮库、调机及工程车库等;自动驾驶区包括停车列检库、洗车库等。利用调机牵出线兼作转换轨,实现自动驾驶模式与人工驾驶模式信号转换作业。

图1 地铁FAO车辆基地总图Fig.1 Schematic diagram of metro FAO vehicle base plan
停车列检库是自动驾驶区核心区域,列车正常运行场景下的入库、休眠、唤醒、出库等均无需人工干预[8];而列车的列检、清扫等维护任务均由人工完成。为保证停车列检库安全防护等级与正线相同,确保列车运行安全,库内列检等维护作业进行时,该区域内列车禁止动车、接触网为断电状态。但停车列检库内所有列车断电且禁止动车,会影响列车出入库的运行效率,进而影响正线运行。因此,停车列检库按照每2个股道划分为1个防护分区,各防护分区内进行列车维护作业时,不影响其他防护分区内列车正常运行。停车列检库平面布置如图2所示。

图2 停车列检库平面布置图Fig.2 Floor plan of parking maintenance garage
停车列检库各防护分区之间均设置了分区围栏等隔离设施,避免其运营期间人员随意进出。为满足作业人员的通行,在停车列检库中部设置地下人行通道,并在人行通道对应于各防护分区处设置出入口。
2 自动驾驶区存在问题及其解决思路
自动驾驶区虽设置了分区隔离设施,但在安全管理上主要还是采用人工配合视频监控的方式,存在一定的安全风险。主要问题包括以下几点:
1) 人员进出管理完全依赖门卫和视频监控,不可避免地出现人员误入和滞留的问题。
2) 各分区出入口的开关未与列车信号、接触网等系统进行联锁,作业时存在安全隐患。
针对自动驾驶区内人员管理存在的相关问题,本文提出一种集门禁管理、安全联锁控制、实时监控、人员防护等功能于一体的安全防护系统。安全防护系统结合自动驾驶区物理隔离方案,利用多种检测手段和逻辑联锁控制方法严格控制人员进出,以实现在列车正常运行情况下自动驾驶区无人员通行,以及在人员维护作业情况下列车禁止动车的目标。
3 车辆基地自动驾驶区安全防护系统
车辆基地自动驾驶区安全防护系统通过中枢与列车信号、隔离开关、门禁等系统进行自动联锁,并将信息呈现给调度人员,保证列车维护作业安全、有序进行[9]。
安全防护系统设有1个主控系统,通过主控系统衔接门禁控制子系统、安全联锁控制子系统、视频监控及人员定位子系统、显示调度子系统等。每个子系统通过主控系统和其他子系统形成互锁机制,所有子系统都依托主控系统运行,当主控系统发生故障后,其他子系统将无法运行。
车辆基地DCC(控制中心)负责对车辆基地的行车、车辆检修、接触网断送电等基地内的所有生产作业进行全面调度管理[10]。车辆基地自动驾驶区安全防护系统主要承担车辆基地DCC检修调度中的部分功能。该控制中心可通过各子系统的功能实现接触网断送电记录、台位占用统计、隔离开关状态及检修区域人员滞留情况显示,并通过各子系统的逻辑联锁进一步保障车辆及人员作业安全。车辆基地内有调车需求时,由车场调度向OCC(运营控制中心)申请,车场检修调度提供可用的车辆数量及车辆检修计划;负责正线列车调度的ATS(列车自动监控)系统提供列车运行图信息,结合本系统提供的车辆停留、台位占用、隔离开关状态、防护分区内作业人员状态等信息,综合产生调车计划。
车辆基地自动驾驶区安全防护系统的结构如图3所示。

图3 车辆基地自动驾驶区安全防护系统结构图Fig.3 Structural diagram of vehicle base automatic driving area safety protection system
3.1 门禁控制子系统
停车列检库中各防护分区出入口处均设置门禁控制子系统(见图4)。

图4 门禁控制子系统Fig.4 Access control subsystem
门禁控制子系统由门禁控制主机、指纹识别仪、状态指示灯、门锁、防尾随系统等组成,每个防护分区的门禁控制子系统彼此独立。门禁控制子系统具有生物识别功能,提前录入作业人员信息,并与检修作业计划管理等系统关联。当进入门禁控制区的人员无作业任务或作业任务与该作业区域不符时,禁止打开门锁。门禁控制子系统还具有计数与防尾随功能,采用光电传感器-智能图像分析技术,统计出、入防护分区人员的数量,确保出、入防护分区人员一致;当发生尾随时,现场声光报警并自动记录尾随录像,同时通过语音提示调度室,调度人员可通过调取尾随视频进行确认。
门禁控制子系统与接触网是否带电逻辑联锁,当作业分区隔离开关未分闸或接地杆未接地时,该分区门禁禁止开放,实现了作业分区的供电安全,并通过显示调度系统实时显示该分区接触网带电状态与人员状态,从多角度保证作业分区的人员安全。
3.2 安全联锁控制子系统
安全联锁控制子系统主要实现信号、隔离开关、接地、门禁等设施间的互联互锁。该系统主要由操作终端、接口柜、车位传感器、报警设备等组成,各防护分区安全联锁控制子系统彼此独立。操作终端是安全联锁控制子系统的人机接口,通常置于调度控制室,用于设备操作员进行确认操作。接口柜内设置有安全继电器和相关的安全逻辑控制单元,用于接收操作终端的指令并驱动隔离开关、信号机等动作,并采集相关设备状态发送给操作终端。车位传感器用于检测车辆是否到达库门前和是否驶入台位。报警设备用于警示该系统相应的动作状态和其他不正常的状态。各设施之间的联锁关系如下:
1) 合闸条件如下:门禁控制子系统检测自动驾驶区无人;监护员通过视频监控认为可以合闸(受电弓升弓);自动接地杆已摘(收到位);按下报警按钮后,声光报警响30 s同时进行广播提示。上述条件均具备,且可合闸红色指示灯亮后,按下隔离开关闭合按钮,隔离开关才能闭合。
2) 监护员通过视频监控认为可以分闸(受电弓降弓),按下报警按钮后,声光报警响30 s;同时进行广播提示,分闸黄色指示灯亮后,按下隔离开关断开按钮,隔离开关才能断开。
3) 隔离开关合闸,则隔离开关合闸红灯亮,LED(发光二极管)显示屏显示“有电”,相应股道检修台位的作业门锁闭,作业门指示灯红灯亮。
4) 当隔离开关分闸且自动接地杆接地,以及LED显示屏显示“无电”、门禁作业门解锁、作业指示灯绿灯亮时,作业人员方可刷卡进入防护分区。
5) 隔离开关分闸到位并验证无电,且经操作人员确认后,自动接地杆可以挂杆。
6) 隔离开关分闸到位并验证无电,防护分区无人员作业,经操作人员确认后,自动接地杆可以摘杆。
隔离开关闭合和分闸操作与门禁状态、接触网带电状态、库内动车信号等的联锁关系如图5~6所示。
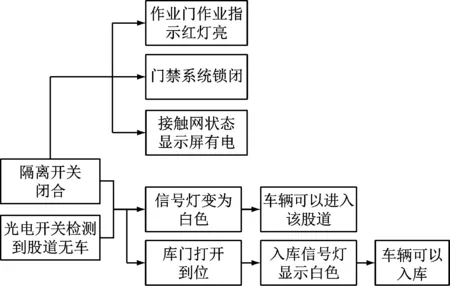
图5 隔离开关闭合安全联锁关系示意图
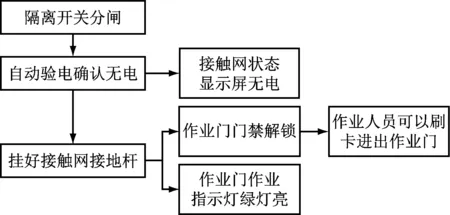
图6 隔离开关分闸安全联锁关系示意图
3.3 视频监控及人员定位子系统
视频监控及人员定位子系统主要实现对安全防护系统防护分区内作业人员及其他状态的实时监控,以便调度人员了解现场情况并及时做出响应。该系统由图像监控主机、图像监控终端、摄像机、人员定位装置等组成。在作业区域安装高清摄像枪机和球机对作业情况进行监视,并通过光端机传输至设备机房,然后进行数字视频的编码和网络传输。采用RFID(射频识别)跟踪定位技术和UWB(超宽带)无线定位通信技术,对作业人员在作业区间进行精确定位,定位精度在1 m以内。同时通过数据库对摄像机在库内的拍摄位置数据与定位数据进行处理,并将摄像机和定位系统进行关联,记录检修位置和检修作业视频。视频监控及人员定位子系统的现场布置如图7所示。

图7 视频监控及人员定位子系统现场布置
3.4 显示调度子系统
显示调度子系统以PLC(可编程逻辑控制器)网络控制系统为核心,通过自动检测设备,对车辆停留、台位占用、隔离开关位置、接地状态、防护分区内有无人员及作业人员状态等信息进行自动读取和记录,在调度室的显示终端大屏上进行实时显示。该系统主要由显示调度主机、调度显示屏、音频广播系统、操作台、微机柜及各级检测单元等组成。
调度控制软件运行后,软件界面可显示下列信息:车辆进出状态,隔离开关分合闸状态,自动接地杆接地状态,安全作业门指示灯状态。系统的显示界面根据库内状态实时变化,调度人员可以观察库内各股道列检台位的作业情况,见图8。

图8 显示调度子系统软件界面Fig.8 Software interface of dispatching display subsystem
4 安全防护系统的应用效果
以南宁市某地铁车辆基地建设项目为依托,对该项目自动驾驶区的安全防护系统进行了测试,发现该系统实现了作业分区出入口的门禁自动化管控,具体表现为:该系统能够在无人值守情况下,准确统计出入人员数量,有效防止人员尾随;实时监控作业区域信号及接触网带电状态,对作业人员进行安全警示,一旦出现异常状态立即进行警示,并通知对应管理人员;通过视频监控系统与人员定位系统,实时定位自动驾驶区内人员位置,并实时显示在调度中心的显示终端;通过主控系统衔接及逻辑联锁控制,使得各子系统之间相互协作。由此可见,车辆基地安全防护系统从硬件控制、人员管理等多个角度全方位保障自动驾驶区作业过程中人车安全的同时,起到了减员、增效的作用。
5 结语
本文通过对当前地铁FAO车辆基地自动驾驶区的安全管控现状进行分析,针对存在的安全隐患,针对性地提出了以信息化、智能化技术为核心的安全防护系统,有效弥补了传统车辆基地自动驾驶区人员管控与安全防护的短板。通过预留接口,实现了安全防护系统与车辆基地内其他管理系统的数据联通与功能互补,为车辆、设备及人员的安全提供了有力保障。
