基于列车安全包络延伸的全自动运行系统跳跃锁闭方案研究
2022-07-12黎晨光邢科家王俊高
黎晨光,邢科家,王俊高
(1.中国铁道科学研究院研究生部,北京 100081; 2.中国铁道科学研究院集团有限公司通信信号研究所,北京 100081)
引言
随着城市轨道交通全自动运行系统在北京、上海等城市的应用,无论是从运营的效率还是安全角度来看,这种具有更高智能化和自动化水平的列控系统相较于传统的CBTC(基于通信的列车运行控制)系统具有显著优势[1-5]。但全自动运行系统的大规模普及还需依赖成熟完备的技术来支撑,需要对全自动系统中相较于传统有人驾驶的列控系统中新增场景进行分析处理,以避免影响运行安全及效率的问题产生[6-7]。
全自动运行系统新增了休眠唤醒、蠕动模式,跳跃停车等功能实现智能化控制。其中,跳跃停车是指列车对标不准后在一定误差范围内允许列车二次对位停车的功能[8]。现有跳跃方案以CI(联锁)系统为核心,通过设置跳跃锁闭的方式保证跳跃的安全性[9]。联锁系统通过对已经出清解锁的区段进行重新锁闭的方式来实现对跳跃的安全防护,该方案可以实现某些特定情况下的列车跳跃功能,但设置跳跃锁闭需要联锁系统对目标区段进行处理,而联锁系统需要检查的条件较多,造成效率降低,并且实施场景也受到一定限制。因此,需制定一种更高效可用的新方案来实现跳跃锁闭的功能,来保证跳跃停车的安全性。
1 全自动运行系统跳跃锁闭需求
IEC62267提出了城市轨道交通列车运行自动化等级的相关概念,将列车运行GoA(自动化等级)划分为5级,分别为GoA0~GoA4[10]。其中GoA0为司机目视列车运行,GoA1为非自动化列车运行,GoA2为STO(半自动运行),列车由ATO(自动驾驶系统)自动控制运行和停止,但需要驾驶员进行监督并负责完成开关门和应急事件处理等操作。GoA3为DTO(有人值守的全自动运行)模式,GoA4为UTO(无人值守的全自动运行)模式,所有功能均由系统负责实现,是全场景和紧急情况处理的自动化实现。
DTO和UTO均为全自动运行,在该系统下列车通过新增和提升系统功能代替司机的操作实现列车的安全运行。全自动运行系统增加了跳跃停车等功能,跳跃停车是指在列车进站对标停车不准后,在一定误差范围内(一般为0.5~5 m)列车可以自动进行前后低速小距离自动对位停车调整来实现列车自动停准的功能[8]。在CBTC系统中,列车进站对标不准后由司机进行对位调整,而全自动运行系统中需要系统自动实现,因此,需要设置跳跃锁闭来对列车跳跃进行防护,保证系统的运行效率和安全。跳跃停车分为向后跳跃和向前跳跃,分别对应列车停车过标和欠标的情景。
1.1 向后跳跃锁闭
当列车进站后停车位置越过运营停车点0.5~5 m时,认为列车停车过标,需要执行向后跳跃操作以调整列车至运营停车点。列车车载ATP(列车自动防护系统)需要对当前列车车尾距离进站计轴点的距离是否满足跳越的安全防护距离进行判断,只有该距离大于跳跃所需的安全防护距离才允许向后跳跃[9]。
一般情况下,列车向后跳跃需要依赖实际站台区段的长度,当站台区段过短时会造成跳跃不满足安全防护距离而无法进行跳跃的情况出现,因此,需要通过技术手段对进站列车已出清解锁的站台前方的一个区段即进站计轴区段进行锁闭,以保证列车向后跳跃满足安全防护的要求。本文提出的跳跃锁闭方案主要用以解决列车跳跃时不满足跳跃所需防护距离的情况。
1.2 向前跳跃及保护区段锁闭
当列车进站后停车位置未达运营停车点0.5~5 m时,认为列车停车欠标,需要执行向前跳跃操作以调整列车至运营停车点。在CBTC的联锁子系统中除设置列车进路外,同时设有保护进路进行防护。保护进路是用来防护列车因为停车误差而越过出站信号机所面临的安全问题设置的,保护进路通常设置在进路终端信号机内方,并将保护进路防护的区段称为保护区段。由于CBTC全自动运行系统中的列车实际上是实现ATP防护下的ATO自动运行,而保护区段的设置实际上就是通过把OSP(运营停车点)和POP(安全防护点)拉开合理的距离来保证ATO制动速度曲线始终处于ATP保护速度曲线下方,并间隔一定的速度缓冲区[11-13]。在全自动运行模式下,列车由ATO自动控制运行,由于 ATO速度曲线终点往往设置在站台运营停车点位置,故列车ATP需要将安全停车点位置延伸至终端信号机内方的保护区段中,这样才能保证列车在预定停车点停车以保障运行安全[7]。保护区段示意如图1所示。

图1 保护区段示意
由于执行向前跳跃需要将ATP安全保护距离延伸至站台区段前方一个区段,即列车当前所在进路的保护进路中,因此,需要检查保护区段的状态,只有当保护区段处于锁闭状态时列车才可执行向前跳跃操作。而在CBTC系统联锁子系统中,保护进路的解锁方式为占用触发区段倒计时解锁或者是联锁收到列车停准停稳信息后解锁,联锁系统会为每一条保护进路设置1个或多个解锁触发区段,当列车完全进入解锁触发区段时,联锁系统开始启动保护区段解锁20 s倒计时,20 s后自动解锁保护区段。对于进站列车来说,保护区段的触发区段即为站台区段,当列车进站后20 s内还未停准,此时保护区段解锁并且无法再次锁闭,ATP曲线无法向前延伸,列车也就无法执行向前跳跃,因此,联锁系统需要将保护区段进行跳跃锁闭,从而为执行向前跳跃提供条件,以实现列车向前跳跃功能。
2 列车跳跃锁闭既有方案
2.1 列车跳跃锁闭既有方案分析
现有的对于列车进站后过标需要执行向后跳跃锁闭的流程[10]描述如下:VOBC(列车车载控制器)首先判断列车进站停车过标且满足申请向后跳跃的条件,向ZC(区域控制器)发送向后跳跃的申请。当ZC接收到该向后跳跃申请,判断该列车向后跳跃所需的区段、道岔等满足锁闭条件时,ZC向联锁发送申请锁闭该计轴区段的请求;当联锁系统收到锁闭该区段的请求,判断该区段满足锁闭条件后,对该区段执行锁闭,并向ZC发送已锁闭该区段的信息;ZC收到联锁发送的已锁闭信息后,将允许跳跃信息发送给VOBC,由VOBC自动执行向后跳跃。列车跳跃完成,VOBC回复给ZC停稳信息后,ZC向联锁申请跳跃锁闭取消;联锁收到取消锁闭的命令后,取消跳跃锁闭并传递给ZC,跳跃锁闭信息流如图2所示。

图2 跳跃锁闭信息流
2.2 列车跳跃锁闭既有方案存在的问题
现有列车跳跃锁闭方案虽然可以解决部分场景下的列车向后跳跃的问题,但存在以下不足。
(1)当跳跃所需锁闭的区段已经被其他列车进路锁闭后,会导致联锁无法进行跳跃锁闭,因此,会导致进站列车向后跳跃不满足退行防护的要求而无法跳跃。如图3所示,进站列车在站台区段5G停车过标需向后跳跃,此时,由于3G被后续列车占用,故无法对3G进行跳跃锁闭,列车无法进行向后跳跃,此时进站列车无法对标开门,影响该线路运行效率。
图3 列车无法跳跃的场景
(2)当已经对目标区段锁闭完成后,VOBC与ZC通信中断,导致ZC收不到列车停稳对标的信息,无法向联锁传递取消锁闭命令,将会导致跳跃锁闭无法取消,影响后续列车进路。
(3)该方案有关跳跃锁闭信息传输通道过长,需要VOBC同ZC以及CI的多次信息交互,会造成跳跃效率降低影响列车运营。
(4)由于新增跳跃锁闭功能不同于原有联锁系统中的进路锁闭和单独锁闭等锁闭操作,存在不确定性的风险。
3 基于列车安全包络延伸的跳跃锁闭方案
3.1 基于列车安全包络延伸的跳跃锁闭方案分析
通过分析原有方案,向后跳跃锁闭功能实施的基础是对向后跳跃锁闭所需条件是否满足进行判断,该条件具体包含站台区段后方的进站计轴区段的锁闭状态和区段内道岔锁闭状态等信息。原有方案是通过ZC、VOBC和联锁之间信息传递的方式使联锁系统将已经解锁的区段和道岔再次进行锁闭,因此,需要考虑该区段和相应道岔是否满足再次锁闭的条件,当锁闭条件不满足则无法执行向后跳跃操作。因此,在改进方案中将对已经解锁区段和道岔的重新锁闭操作转换为使所需区段和道岔保持锁闭的方式来进行处理,具体方法如下。
当全自动列车进入站台区段时,列车先后会经过布置在线路上的固定应答器并自动进行校位,当列车经过站台区段的固定应答器后,车载ATP对列车车尾安全包络进行处理,为列车跳跃预留出一段包络,用以列车在到达运营停车点附近且未停准停稳前保持对进站计轴区段的持续占用,以满足列车跳跃的条件,进而使列车完成后续跳跃功能。
同时,当列车需要执行向前跳跃功能时,由于车尾安全包络的处理使列车未完全出清进站计轴区段,保护进路延时解锁条件不满足,故保护区段一直锁闭,因此,列车向前跳跃所需区段条件满足,列车可实现向前跳跃功能。
3.2 列车车尾安全包络的处理
城市轨道交通信号系统在站台区段设置1组ATO位置校正应答器,用于列车精确定位及停车,其通常由3~4个固定应答器组成[14]。该组应答器在工程设计时已经按照精确位置进行固定安装,当列车越过进站计轴区段第一个应答器后,就开始校正位置并自动调整列车安全包络。列车安全包络是指车载ATP在计算时考虑校位误差后的列车位置可能存在的范围[15]。列车安全包络组成如图4所示。

图4 列车安全包络组成
图4中,列车尾部安全包络中包含三部分:①代表尾部保护距离裕量;②代表潜在的退行量;③代表测距误差。测距误差是由于系统本身特性带来的列车定位误差。潜在的退行量是由于通信延迟导致的估计运行距离。保护距离裕量是保证列车在不利的情况下,如空转、打滑时的保护距离。因此,可以通过增加一段用于全自动列车跳跃的保护裕量的方式进行车尾包络延伸处理,即在图4中将车尾包络的①部分进行处理。当列车VOBC调整安全包络时,将全自动列车向后跳跃需要的一段保护裕量添加进去即可实现。该裕量的长度只需满足当列车越过运营停车点且处于可跳跃距离上限5 m时,仍旧可以保持对进站计轴区段的占用即可,一般每条地铁线路根据列车长度和站台长度,以及运营停车点位置计算取定一个固定值。
3.3 列车跳跃锁闭的具体流程
(1)当全自动列车运行至站台区段内方的固定应答器后,列车VOBC自动延伸出一段跳跃可用的列车车尾安全包络并将自身的安全位置发送给ZC,列车未完全停准、停稳时会一直保持该包络的延伸。列车尾部包络的延伸使得列车并未完全出清进站计轴区段,因而保持对进站计轴区段的逻辑占用使其保持锁闭,并且由于列车未完全进入站台区段,因此,保护区段解锁条件没有满足也会一直保持锁闭状态,列车的ATP曲线防护的终点POP可以保持在保护区段内,保护区段继续处于锁闭状态。
(2)当列车对标不准需要进行跳跃时, VOBC向ZC申请跳跃,ZC判断待跳跃目标区段及道岔状态为锁闭时允许列车跳跃。车载ATO在车载ATP的防护下自动执行向后/向前跳跃操作,当执行完跳跃操作成功停车至目标点之后,VOBC向ZC发送列车已停准、停稳的信息,并自动收回跳跃延伸的车尾包络,对已经出清的进站计轴区段的解锁。
(3)ZC将停准停稳信息发送给联锁,使联锁将保护区段立即解锁,完成整个跳跃流程。图5为该跳跃锁闭方案的信息交互流程。

图5 基于包络延伸的跳跃锁闭流程
3.4 包络延伸对列车追踪效率的影响及解决方案
由于全自动列车在进站范围内为实现跳跃功能会延伸一段尾部包络,可能会造成后续列车追踪目标点的变化而影响后方列车的运行效率,因此,需要采取合理方法来避免该现象的发生。
在实际工程设计中,为了保证全自动运行系统的安全,后方全自动列车的MA(移动授权)终点并不是前方全自动列车最小安全后端所在的位置, 而是基于前车最小安全后端留有一个安全余量的位置[16-19]。对于进站列车来说,虽然列车尾部包络延伸导致列车最小安全后端额外增加了一段距离,但是列车实际位置同包络延伸前并未发生变化。因此,ZC在考虑后方列车追踪前方进站列车这一情况时,针对安全余量部分也相应地减少了一段同包络延伸的长度相当的距离,这样即可保证后续列车在追踪前方进站列车时的目标点同包络未延伸时保持一致,包络延伸前后追踪目标点和安全余量的变化如图6所示。
当前方进站列车停准停稳后,ZC为后方列车计算移动授权则还是采用原先的安全余量。通过此方式在保证后续列车追踪安全的同时,也不会影响该线路列车的运行效率,有效避免了列车包络延伸所导致后续列车追踪目标点的改变,从而导致运行效率降低的情况出现。

图6 车尾包络延伸前后的安全余量
4 对比分析
基于对两种方案的讨论,进行方案对比分析,如表1所示。

表1 两种跳跃锁闭方案对比
4.1 可用性
基于列车安全包络的跳跃锁闭方案,可以使进站列车持续对向后跳跃的目标区段进行逻辑占用,使其保持锁闭状态,因此,后续追踪列车无法排列包含该目标区段的列车进路,后续列车需等待本列车跳跃完成才可进路。有效解决了待跳跃目标区段被后续列车进路锁闭后,联锁无法进行跳跃锁闭的问题,增加了全自动列车向后跳跃功能可执行的场景。同时,此方法对于列车向前跳跃所需要的保护区段锁闭状态也进行了处理。当列车欠标需要向前跳跃时,也可以由安全包络延伸的方式实现保护区段的锁闭,不需要联锁系统进行保护区段的重新锁闭,即可实现列车向前跳跃的安全防护。因此,新方案相比原有方案增加了跳跃的实施场景,在可用性方面有了很大提升。
4.2 效率
原有跳跃锁闭方案中从列车申请跳跃到收到ZC回复跳跃允许之间的跳跃信息传输过程为VOBC—ZC—CI—ZC—VOBC,因此,原有方案传输跳跃信息的时间(从列车申请跳跃到收到允许信息)为
t1=tapplyt1+tjudge+tlock+texecute
(1)
式中tapply——VOBC的一个通信周期内VOBC判断需要跳跃后向ZC申请跳跃的时间,一般为250 ms;
tjudge——ZC的一个通信周期内ZC判断区段是否可以锁闭并同联锁通信的时间,一般为250 ms;
tlock——联锁的一个通信周期内联锁系统对区段和道岔进行跳跃锁闭并将锁闭信息发送给ZC的时间,一般为250 ms;
texecute——ZC的一个通信周期内ZC判断列车是否可以跳跃并发送给VOBC允许跳跃信息的时间,一般为250 ms。
因此,原方案跳跃信息传输时间约为1 000 ms。新方案中跳跃信息的传输过程为VOBC—ZC—VOBC,联锁的锁闭行为在列车判断跳跃前就已经完成,不需要额外占用时间,仅需要列车VOBC与ZC通信判断是否需要跳跃,联锁系统的处理包含在既有功能中,无需对跳跃信息进行额外处理,列车的安全包络延伸使联锁系统持续收到ZC发来的区段逻辑占用信息。因此,联锁系统一直使待跳跃区段保持锁闭,即在列车申请跳跃前一直给ZC发送锁闭信息,ZC在判断跳跃前就已获取锁闭信息,不需要在列车申请跳跃后才对区段进行锁闭。因此,本方案列车跳跃信息传输所需的时间仅为
t2=tapply+texcute
(2)
新方案从列车申请跳跃到收到ZC回复的允许跳跃信息传输的理论时间为500 ms,相较于原有方案节约了50%的时间,因此,该跳跃锁闭方案使跳跃的效率得到了提升。
4.3 实现方式
新方案相对原有方案的优势主要在于对跳跃所需锁闭区段的锁闭流程进行简化,减少了联锁系统对跳跃目标区段进行跳跃锁闭的操作,直接通过VOBC和ZC之间传输的列车安全位置信息实现对区段的逻辑占用和出清,实现待跳跃目标区段的锁闭和解锁。联锁只需按正常进路的锁闭和解锁进行判断,不需要进行任何跳跃锁闭相关的处理,不需要对联锁系统进行修改,因此,新方案仅涉及VOBC和ZC,不涉及联锁,耦合度减小,减小修改和维护工作量。
5 仿真验证
利用搭建的仿真测试环境对全自动系统跳跃锁闭功能进行测试,该仿真环境选取广州地铁某线路正线联锁控区作为应用场景,主要由轨旁仿真、ZC仿真、联锁仿真、车载仿真以及ATS(列车自动监督)仿真系统组成。各子系统间通过DCS(数据通信系统)按照规定协议完成数据信息交互[20]。各仿真子系统功能如表2所示。

表2 仿真系统功能简介
以图7所示的陈头岗车站为例进行验证。首先在ATS上排列一条S5302-S5312的列车进路,然后在轨旁仿真系统上加载列车,并在车载仿真系统设置列车以FAM模式正线运行,并使其进入陈头岗车站站台,当列车进入陈头岗站上行站台内方应答器后对车尾的安全包络进行延伸,并且当列车未停准越过停车点之后,列车安全包络的延伸使得列车仍保持对5312DG区段的占用,5312DG以及区段内P5306等道岔保持锁闭不解锁。此时,列车ATO判断停车过标并同ZC交互在ZC的防护下自动进行向后跳跃操作,VOBC判断跳跃完成后向ZC汇报停准停稳信息并收回延伸的包络,从而使联锁系统将5312DG解锁并执行保护区段5316DG立即解锁的操作。
利用陈头岗上行站台及本联锁控区其他站台进行30次跳跃场景仿真分析,从列车申请跳跃到ZC回复允许跳跃所用平均时间为502 ms,利用原方案的这一流程信息传输时间为1 003 ms,效率提升约50%。
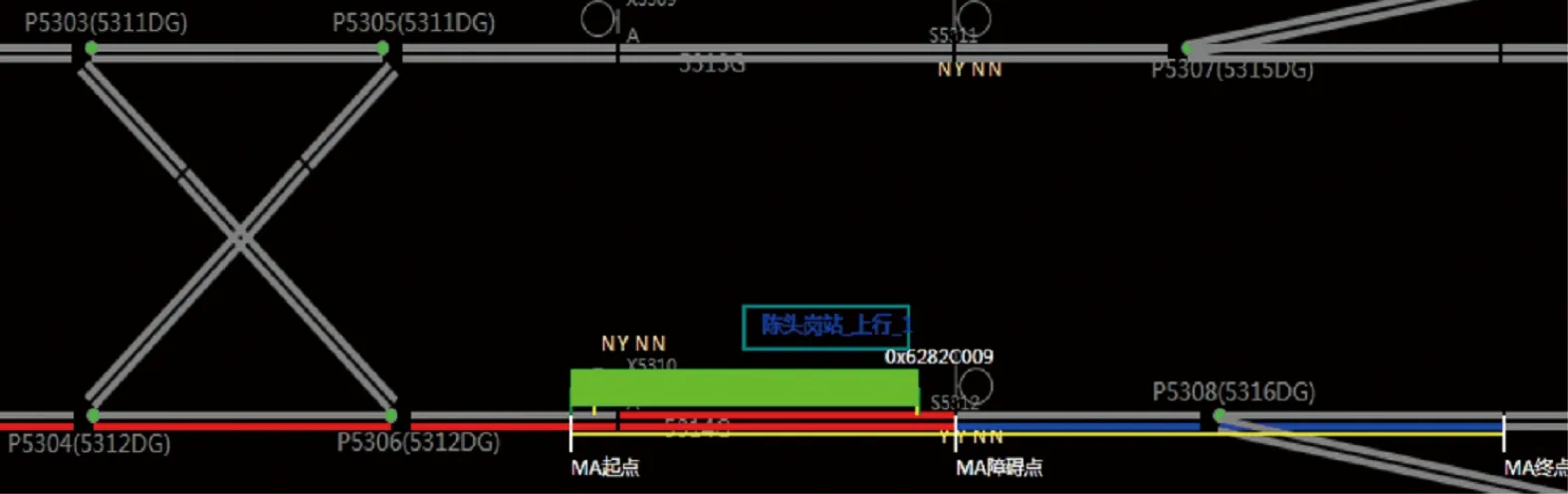
图7 测试场景
6 结论
通过研究城市轨道交通全自动运行系统中新增跳跃场景中的跳跃锁闭功能,提出了一种基于列车安全包络延伸的跳跃锁闭方案。主要结论如下。
(1)通过延长列车车尾安全包络的方式实现对跳跃需要的防护区段的占用锁闭,无需联锁系统对区段的重新锁闭即可实现跳跃功能的安全防护。将原有方案中联锁对已解锁区段重新锁闭的方式,转化为包络延伸使区段不解锁的方式来实现,简化了跳跃信息的传输流程,提高了跳跃的效率。
(2)本方案同时可以满足列车向前和向后跳跃锁闭的需求,弥补了原方案只可进行向后跳跃锁闭的不足,增加了跳跃的可用性。
(3)由于本方案利用仿真系统进行验证,在通信和稳定性方面同真实系统还有些差异,因此,下一步需要通过真实工程场景进行验证。
