基于EDEM的猴魁茶叶充填过程仿真研究
2022-07-10陆佳平方继凡
陶 闱, 陆佳平*, 方继凡
(1.江南大学 机械工程学院, 江苏 无锡 214122; 2.黄山市猴坑茶业有限公司, 安徽 黄山 245700)
猴魁茶叶产自安徽省黄山境内,属于绿茶类尖茶,其外形2叶抱1芽,外形扁平,自然舒展,是世界上最长的绿茶[1]。猴魁茶叶外形特殊且性脆易破损,包装要求较高,不宜采用通用茶叶包装机,故现有猴魁茶叶的包装大多采用人工,包装效率低、劳动强度大且品质难以控制,制约了猴魁茶叶生产的发展。
离散元法最早由Cundall等[2]提出,是研究散粒体动力学问题的一种通用方法,广泛应用于岩石工程、矿山装备等领域。其基本思想是将散体物料简化成一系列具有一定形状和质量的独立运动单元,并根据颗粒本身的离散特性设置相应的参数,采用动态松弛法、牛顿第二定律和时步迭代求解出每个颗粒的运动和位移[3]。近些年来,EDEM开始应用在茶叶机械领域。李兵等[4-6]运用EDEM对茶叶杀青、揉捻和分级过程进行分析,从而优化装置的工作参数,但基于EDEM的猴魁茶叶充填过程的研究几乎没有。
课题组以猴魁茶叶为研究对象,设计了一款适用于长条且有序排列物料的自动化充填系统,填补了现有市面上猴魁茶叶自动化充填研究的空白。并运用EDEM离散元仿真软件对猴魁茶叶充填过程中的运动姿态进行模拟仿真,以验证系统设计的合理性。同时,运用EDEM软件对其进行数值模拟,以茶叶堆积角、平均速率及茶叶颗粒间的平均挤压力为评价指标,分析不同结构参数对茶叶充填性能的影响规律,为后续装置的参数化设计提供参考。
1 猴魁茶叶充填系统工作原理
图1所示为猴魁茶叶充填系统工艺流程,填充系统主要由载具、载具输送线、电磁铁、包装袋、下料推板和半成品输送线组成。猴魁茶叶呈短小扁平状,有头尾之分,包装之前要求排列整齐,且需要经过不同批次茶叶混配工艺。现有对长条状物料的整理大多采用人工实现,部分采用机械手[7],但机械手工作效率低下,对茶叶头尾自动识别难度较大。考虑到包装机整体工作效率,课题组采用人工实现对猴魁茶叶的整理、称量,采用载具间歇输送装置输送茶叶。每个载具之间相互独立,通过电磁铁与输送线活动连接,可快速拆卸,降低茶叶因反复更换盛放容器发生破碎的概率,也更加清洁卫生。当包装袋尺寸改变时仅需更换载具即可。茶叶包装采用了套袋工艺,大大减少了茶叶充填过程中的下落高度,一方面避免茶叶在下落过程中发生松散,另一方面降低了茶叶破碎率。

图1 充填系统工艺路线Figure 1 Process route of filling system
具体工作原理如下:首先,工人将整理、称量好的茶叶放入载具中,再将载具放置在载具输送线上,载具跟随着输送线运动,输送到下一个工位。载具通过电磁铁与载具输送线活动连接,当载具运动到输送线上方,电磁铁断电,载具与输送线断开,工人可轻松将空载具与装有茶叶的载具进行更换,当载具运动到输送链转角处或载具倒置时,电磁铁通电,载具与输送线紧密相连,从而确保载具在输送过程中不会脱离输送线。当载具随着输送线翻转至套袋工位,利用套袋装置将完成开袋的包装袋套在载具上,紧接着载具继续跟随输送线运动,茶叶在自身重力和下料推板的共同作用下完成充填,且包装袋顺利脱离载具到半成品输送线,为后续的包装动作做准备。至此,猴魁茶叶的充填动作全部完成。
2 仿真模型的建立与分析
2.1 接触力学模型及仿真参数的设定
接触模型是EDEM仿真软件进行数值模拟的重要基础设置,现有的颗粒接触模型较多,可根据具体仿真工况和颗粒物理特性选择最合适的模型以达到较高的计算精度。猴魁茶叶颗粒属于干性无粘连颗粒,故课题组采用Herz-Mindlin(No-Slip)接触模型[8]。根据猴魁茶叶物理特性,设置茶叶颗粒模型的物理属性参数和接触属性参数分别如表1和2所示[9-10]。

表1 材料物理属性参数

表2 材料接触属性参数
2.2 仿真颗粒模型的建立
猴魁茶叶的外形特征为两头尖、中间扁平的长条形,且茶叶厚度、长度和宽度等各有差异,课题组选取长、宽、高的平均值建立仿真颗粒模型。对于不规则形状的颗粒建模,主要运用SolidWorks等三维软件对颗粒外形进行建模,再将其导入到EDEM中进行球体填充,填充的球体颗粒越多,拟合出的颗粒模型越接近颗粒真实形状,仿真出来的结果也越接近真实工况。但随着充填球体颗粒数量的增加,仿真的计算量也会增大,对计算机的配置要求更高。课题组通过改变填充球体颗粒的数目建立了4种颗粒模型如图2所示,通过对比4种颗粒模型在相同工况下的堆积角和平均速率,以确定最佳的仿真颗粒模型。

图2 不同颗粒数的颗粒模型Figure 2 Particle model of different particle numbers
堆积角是散体在某种条件下完成堆积过程后,其自然形成的坡面与水平面之间的倾角,是反映颗粒离散性和堆积性的重要指标[11]。堆积角越大则颗粒堆积性能越好,颗粒间结合越紧密,运动过程中越不易松散。为确保堆积角测量的准确性,利用EDEM后处理切片工具分别对4种仿真颗粒堆进行切片处理[12],并导出切片区域内各个颗粒的球心坐标如图3所示。然后通过MATLAB软件对最外延颗粒球心坐标进行线性拟合,并得出拟合直线的方程如图4所示,直线斜率的绝对值即为堆积角的正切值,斜率越大则堆积角越大。

图3 颗粒球心坐标Figure 3 Spherical coordinate of particles

图4 MATLAB线性拟合Figure 4 Linear fitting of MATLAB
在EDEM中导出茶叶完成翻转后的位置及翻转过程中的平均速度,并利用MATLAB对导出的数据进行处理并绘制相关图表。图5所示为4种颗粒模型仿真过程中的堆积角和平均速度曲线。由图5(a)可知,随着颗粒模型充填球体数目的增多,堆积角度也随之增大,但增加速率略有放缓。由图5(b)可知,在翻转过程中,茶叶的速度变化主要分为2个阶段:①0.75~0.85 s,该阶段茶叶速度发生较大波动,主要是因为载具在输送链的驱动下开始翻转,机械振动较大;②0.85~1.25 s,该阶段茶叶速度呈稳定增加趋势,当到达套袋工位,速度达到最大。但随着颗粒模型充填球体数目的增多,茶叶的速度并非呈简单的线性减少,当充填球体为36粒时,速度最大,当充填球体为42粒时,速度最小。这主要由于茶叶在翻转过程中因形状、大小及重心的不确定性而发生不同程度的转动,导致茶叶内部排列方式的不确定性,进而导致茶叶运动速度的随机性。

图5 不同颗粒模型下茶叶堆积角和平均速度曲线Figure 5 Tea stacking angle and average velocity curves under different particle models
经过上述分析对比,综合考虑仿真的真实性和计算机性能,采用充填球体颗粒数为42对后续运动进行仿真。
2.3 充填系统仿真模型的建立与分析
由于整个载具输送线运转速度并不快,茶叶跟随载具平动过程中其速度及姿态改变基本可以忽略不计,故课题组仅对载具运动到转角处茶叶随载具翻转直至完成充填的过程进行仿真分析。其充填过程如图6所示,主要由载具充填、载具翻转、套袋和包装袋充填4个基本操作构成。载具的材料为不锈钢,形状及尺寸与包装袋的形状尺寸相匹配,为长方体容器,长宽分别为92和62 mm,其高度与充填过程中的茶叶的运动情况有关。

图6 猴魁茶叶充填仿真过程Figure 6 Simulation process of Houkui tea filling
由图6可知,载具翻转过程中,90%的茶叶保持原有的排列姿态运动,仅表面部分茶叶由于自身惯性及茶叶颗粒内部的相互作用发生一定的翻转并向载具底部扩散,导致表面部分茶叶相互交错,杂乱无章。随后,载具继续翻转,茶叶在自身重力的作用下落入包装袋中,但由于前期茶叶的排列姿势发生改变,且包装袋底部与茶叶顶部存在高度差,导致先落入袋中的10%左右的茶叶排列混乱,而余下90%的茶叶又能基本按原有姿态落入袋中,满足设计要求。
3 仿真结果及分析
茶叶充填性能除与茶叶本身结构特性有关,还与载具转速、载具结构参数及载具内部茶叶装载数等因素有关。课题组通过对比茶叶的堆积角、平均速度及平均挤压力来探究不同载具转速、载具结构参数及茶叶装载数对充填性能的影响规律。其中,茶叶堆积角是反应颗粒离散性和堆积性的重要指标,堆积角越大则颗粒堆积性能越好,运动过程中越不易松散,茶叶充填质量越高;平均速度反应了茶叶运动过程中整体运动情况,速度越大,茶叶发生松散、碰撞的可能性越大,从而导致茶叶充填质量下降;平均挤压力反应了茶叶颗粒间的作用力大小,平均挤压力越大,茶叶间的相互作用力越大,更易造成茶叶的破碎,导致充填质量下降。
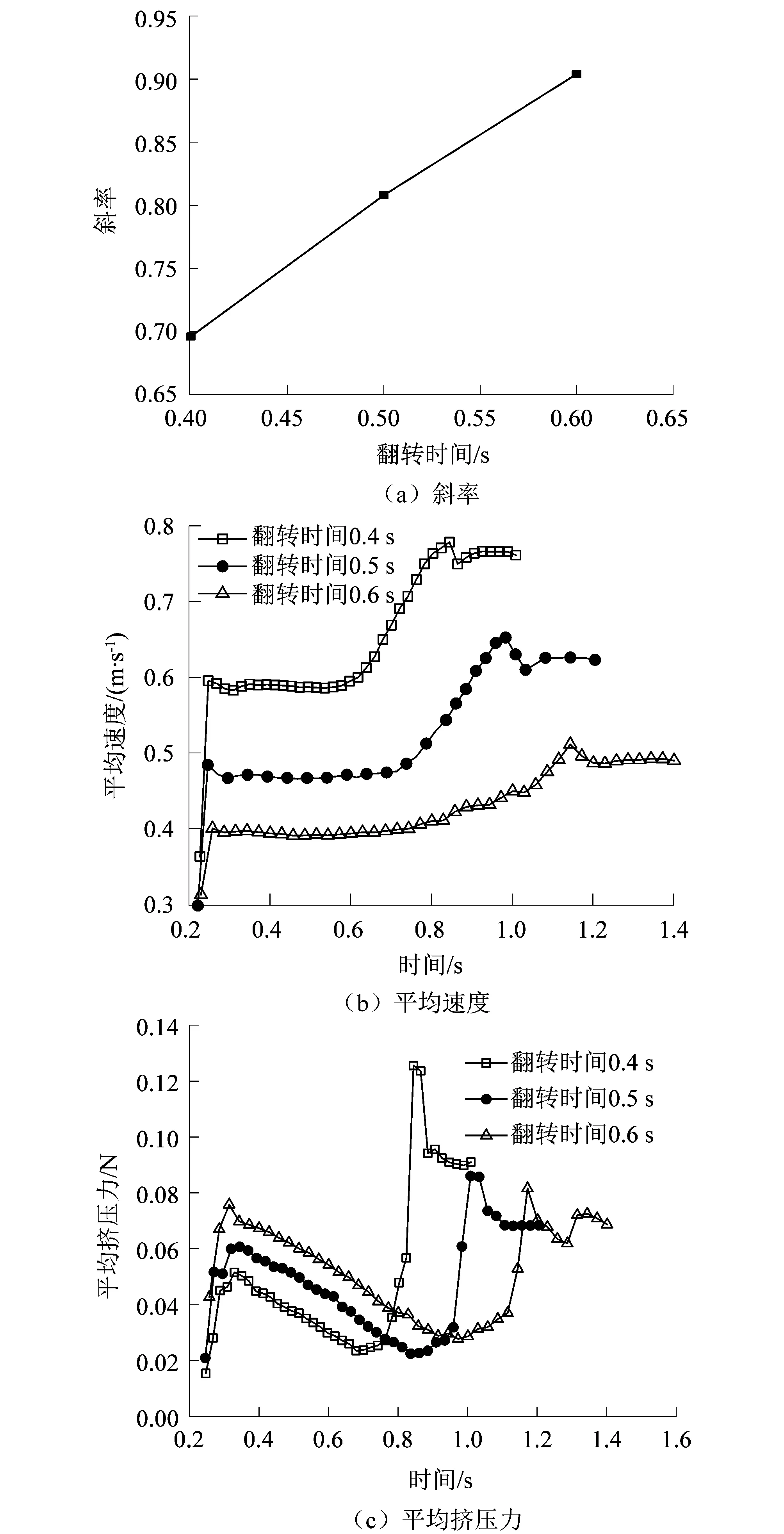
图7 不同翻转时间下茶叶堆积角、平均速度和平均挤压力曲线Figure 7 Tea stacking angle, average velocity and average extrusion pressure curves under different turning time
3.1 载具转速对茶叶充填性能的影响
课题组通过控制载具翻转的总时间来改变载具的转速,时间越短,转速越大。图7所示为不同翻转时间下茶叶堆积角、平均速度和平均挤压力曲线。由图7(a)可知,堆积角随着载具转速的增大,而减小,这主要是由于载具转速的增大,导致茶叶内部运动速度增大,从而更快地向底部扩散,堆积角减小。由图7(b)可知,载具转速对茶叶平均速度有着显著影响,随着载具转速的增大,茶叶的平均速度明显增大。在0.23~0.73 s,初始时,载具开始翻转,机械振动较大,茶叶速度发生较大波动,后逐渐趋于平缓,此刻载具开口整体向上,茶叶受到载具的支撑力,速度较小;在0.73~1.23 s,由于载具开口整体向下,且茶叶顶部与包装袋之间存在高度差,茶叶在自重作用下滑入包装袋内,且随着载具倾角的增大,速度不断增大,在1.00 s左右达到最大值,随后减少,最终逐渐趋于平缓。这主要是因为,当倾角增大到一定程度时,茶叶颗粒间结合更加紧密,相互作用力较大。由图7(c)可知,随着转速的增大,颗粒间的平均挤压力也随之增大。初始阶段,即0.23~0.73 s,平均挤压力整体呈下降趋势,这主要是因为,随着载具与水平面倾角的减小,茶叶向载具底部扩散,茶叶间的接触面较少,作用力也相应减小;0.73~1.23 s,载具开口整体向下,茶叶在自重的作用下,迅速滑入包装袋内,茶叶间的平均挤压力迅速增大,后随着茶叶运动的稳定而逐渐趋于平缓。
3.2 载具高度对茶叶充填性能的影响
载具的结构参数是影响茶叶充填性能重要因素之一,其中长宽与猴魁茶叶的形状特征有关,故课题组仅研究不同载具高度对茶叶充填性能的影响规律。图8所示为不同载具高度下茶叶堆积角、平均速度和平均挤压力曲线。
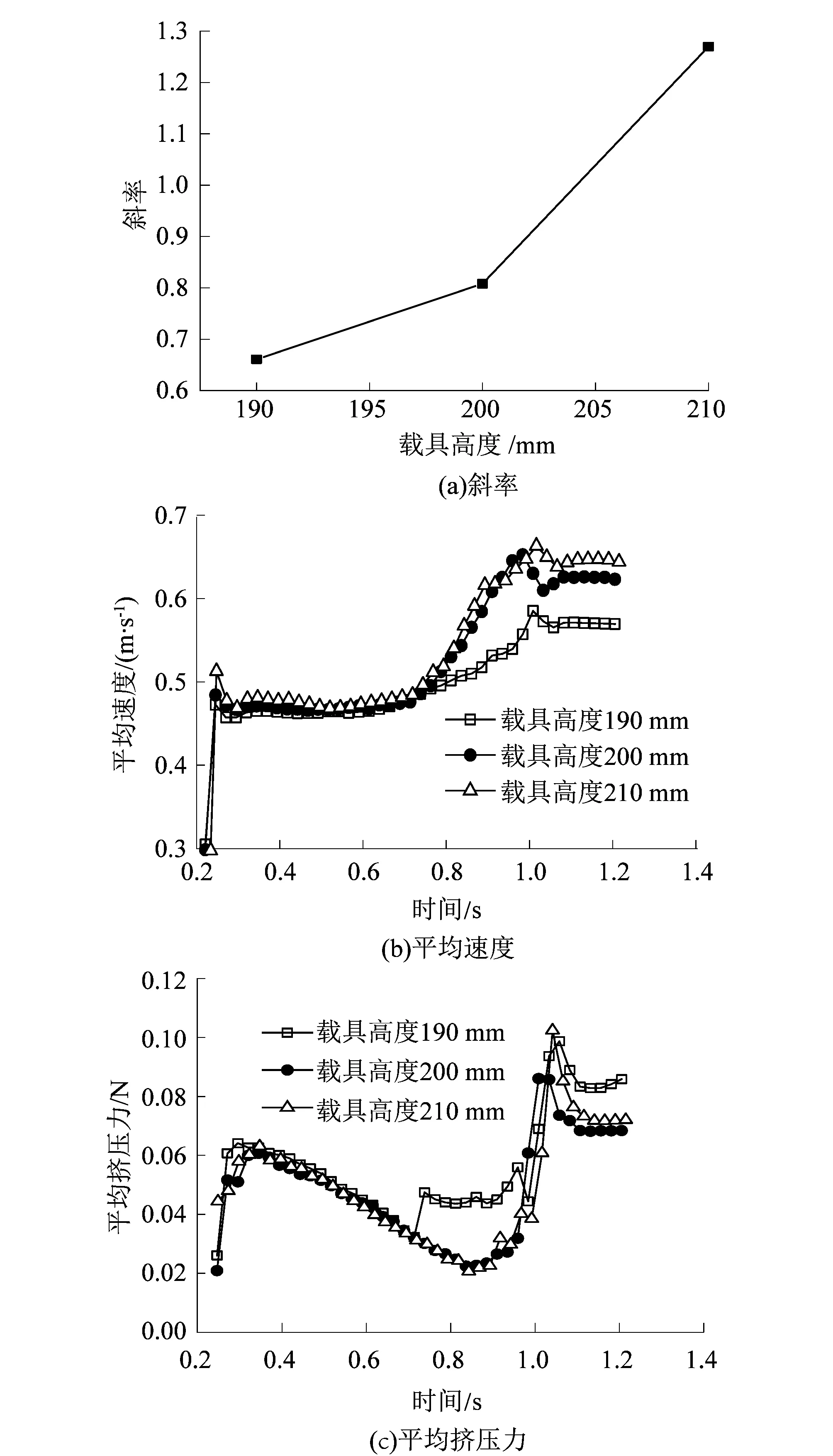
图8 不同载具高度下茶叶堆积角、平均速度和平均挤压力曲线 Figure 8 Tea stacking angle, average velocity and average extrusion pressure curves under different vehicle heights
由8(a)可知,随着载具高度的增加,茶叶的堆积角也随之增大。由图8(b)可知,在0.23~0.73 s,随着载具高度的增加,茶叶的平均速度并无明显的变化;在0.73~1.23 s,随着载具高度的增加,茶叶平均速度也随之增大,这主要是因为,载具高度增大的同时,导致茶叶顶部与包装袋底部的高度差增大,茶叶下落高度增大,进而平均速度增大。由图8(c)可知,随着载具高度的增加,茶叶间的平均挤压力并无明显的变化,但在0.73~1.23 s,平均挤压力发生较大波动,这主要是因为茶叶顶部与包装袋底部高度差的变化,导致在落入包装袋的过程中,茶叶姿态发生不同程度的倾斜,颗粒间排列杂乱无章,从而导致茶叶间的相互作用力较为复杂,无规律可循。
3.3 茶叶装载数对茶叶充填性能的影响
课题组通过向载具内充填不同数目的颗粒来改变茶叶的装载数。图9所示为不同装载数下茶叶堆积角、平均速度和平均挤压力曲线。由9(a)可知,随着装载数的增加,茶叶的堆积角也随之增大。这是由于随着装载数的增大,茶叶间的结合更加紧密,在翻转过程中越不易松散而向底部扩散。由图9(b)可知,随着载具高度的增加,茶叶的平均速度整体呈上升趋势,但变化并不显著。由图9(c)可知,在0.23~0.73 s,随着载具高度的增加,茶叶间的平均挤压力基本保持不变。但在0.73~1.23 s,平均挤压力发生较大波动,且无明显的规律可循。这主要是因为,在改变茶叶装载数的同时,间接改变了茶叶顶部与包装袋底部高度差,进而造成当充填颗粒数为1 000时,平均挤压力反而减小;当充填颗粒数为1 050时,平均挤压力最大,虽然茶叶顶部与包装袋底部间的高度差减小,但茶叶间结合紧密,交错重叠众多,进而导致此阶段茶叶间的平均挤压力最大。

图9 不同装载数下茶叶堆积角、平均速度和平均挤压力曲线Figure 9 Tea stacking angle, average velocity and average extrusion pressure curves under different capacities
4 结论
课题组以猴魁茶叶为研究对象,根据其结构特征及包装要求设计了一款适用于长条且有序排列物料的自动化充填系统,并运用EDEM仿真软件对充填过程进行仿真分析,验证了系统设计的合理性,填补了现有市面上猴魁茶叶自动化充填研究的空白,为后续猴魁茶叶袋装机的设计与研发提供了参考。
课题组通过EDEM软件对猴魁茶叶充填过程进行数值模拟,以茶叶堆积角、平均速度及茶叶颗粒间的平均挤压力为评价指标,分析载具转速、载具高度及装载数对茶叶充填性能的影响规律。结果表明:载具转速对茶叶充填性能影响最为显著,随着载具转速的增大,茶叶的堆积角、速度及内部挤压力均有明显增加。课题组的研究可为后续猴魁茶叶袋装机的参数化设计提供参考。
