面向嵌入式设备的扶梯客流量实时统计方法
2022-07-08杜启亮向照夷田联房
杜启亮 向照夷 田联房,3
(1.华南理工大学 自动化科学与工程学院,广东 广州 510640;2.华南理工大学 自主系统与网络控制教育部重点实验室,广东 广州 510640;3.华南理工大学 珠海现代产业创新研究院,广东 珠海 519175)
如今视频监控摄像机分布在公共场所的各个角落,促使智能视频监控系统成为安防的主要手段,被广泛运用在商场、医院、学校等场所。而客流量检测是其重要的研究内容之一,对于智能安防、智慧旅游、交通规划等领域的研究具有重要的意义[1-3]。
传统监控系统中的客流量统计任务大多是基于人工设计和提取特征完成的。李航等[4]通过提取俯视行人头部的梯度范数(NG)和梯度方向直方图(HOG)特征,使用支持向量机(SVM)完成乘客头部检测,并通过CamShift算法进行乘客跟踪来实现客流量统计。Haq等[5]为了提高运行速度,只提取了HOG特征,并采用KLT(Kanade Lucas Tomasi)跟踪器,同时手动设定待检测区域以减少运算量。这些方法的特征表达能力弱,从而导致统计精度较低。杜启亮等[6]使用表征能力更强的AdaBoost算法进行头部识别,利用Kalman算法进行目标跟踪,但该算法只能从乘客正上方检测头部,应用场景受到限制,且摄像机垂直向下的安装方法导致获取到的乘客信息大幅减少,不利于集成其他监控任务。文献[7-8]则通过检测手扶电梯梯级上特征较为丰富的人脸进行客流量统计,避免了限制摄像机安装方式,然而在地铁环境中通常乘客较为拥堵,后面的乘客易被前面乘客遮挡而影响跟踪,造成人员的漏检及客流量的错误统计。因此,以上基于浅层学习的算法,虽然实时性较高,但人工特征过于简单,难以适应复杂环境,统计准确率不理想。
随着神经网络的兴起,深度学习相关方法不断应用于客流量统计任务中,相较于传统方法可以自动地从数据中提取有用的特征,解决了传统手工特征表达能力不足的问题。朱林峰等[9]使用Faster R-CNN进行人头检测,并利用全卷积孪生网络(SiamFC)算法实现乘客跟踪,客流量统计准确率有较大的提升,但跟踪过程只依赖于第一帧检测结果,在目标发生较大形变或遮挡时容易造成目标丢失。Liu等[10]使用YOLOv2检测乘客,并结合多示例学习(MIL)算法对乘客位置进行预测,以重叠度作为数据关联的依据实现乘客跟踪与客流量统计,检测速度有所提升但只适用于乘客稀疏的情况。沈爽[11]使用YOLOv3网络进行乘客检测,并使用DeepSORT算法进行跟踪,利用连续多帧图像间的特征相似度缓解乘客之间的遮挡问题,但跟踪算法的时间复杂度大幅增加。Hsu等[12]使用单发多框检测器(SSD)网络对乘客头部进行检测,提出了一种结合空间距离、外观特征及运动模式的级联数据关联方法,解决了公交车环境下客流量统计的遮挡问题,但跟踪算法较为复杂。Velastin等[13]证明了人头跟踪任务中未使用图像特征的SORT算法要优于DeepSORT算法,但未给出遮挡情况下的处理方法且人头检测模型过大。以上基于深度学习的算法主要依赖大型的网络结构来提高统计准确率,存在网络结构复杂、参数量大、运行效率低的问题。
然而,算法的运行环境并非都是高性能计算平台,随着边缘设备的快速发展,社会上出现了越来越多的嵌入式设备,其凭借自身价格低、体积小等优势被各大公司广泛使用,但也存在计算能力不及高性能服务器的缺点,无法实时运行计算量很大的算法。
为了使客流量统计算法在保证统计准确率的前提下,可以高效地运行在嵌入式设备中,本文设计了一种面向嵌入式设备的扶梯客流量实时统计方法。该方法首先对手动截取的感兴趣区域(ROI)图像进行无失真缩放,以保持检测图像与训练样本信息分布一致;然后搭建本文提出的YOLOv4-tiny-fast目标检测网络,调整合适的参数进行训练,并使用训练好的网络进行乘客人头的实时检测,使用改进的目标跟踪算法获得乘客的运动轨迹;最后根据乘客轨迹完成客流量统计任务,并与其他算法进行了对比。
1 乘客检测
1.1 图像预处理
在输入目标检测网络之前,需要对输入图像进行预处理。实际环境中,相机的高度无法固定,采集到的图像与训练集差别较大,易导致检测效果变差。为避免无关信息对乘客跟踪计数的影响,应该对不同场景下相机采集到的原图像手动选定乘客检测区域ROI,尽可能地不引入非计数目标。
由于ROI的长宽无法固定,而输入检测模型的图像I1长宽固定,且必须是32的整数倍,如果强行改变ROI图像的大小为模型所需输入大小,必将产生拉伸失真,从而导致测试图像与训练样本图像信息的不一致,无法充分发挥检测模型的性能,因此本文提出了一种无失真缩放的图像预处理方法:固定I1的尺寸,将ROI图像的长宽以相同的比例缩放并粘贴至I1中心,未铺满区域使用中值填充,处理效果见图1。可以看出,该缩放方法得到的图像无拉伸失真,保证了处理前后图像信息的分布一致性,排除了图像失真对检测模型准确率的影响,为后续对检测模型的优化打下基础。该处理方法与手动ROI选取相结合,在不同场景、不同ROI尺寸下都可以获得相同大小的图像,保证了输入检测模型的图像尺寸固定,且在图像不发生形变的前提下,去除了大量的无关噪声,大幅减少运算量,提高检测效果。
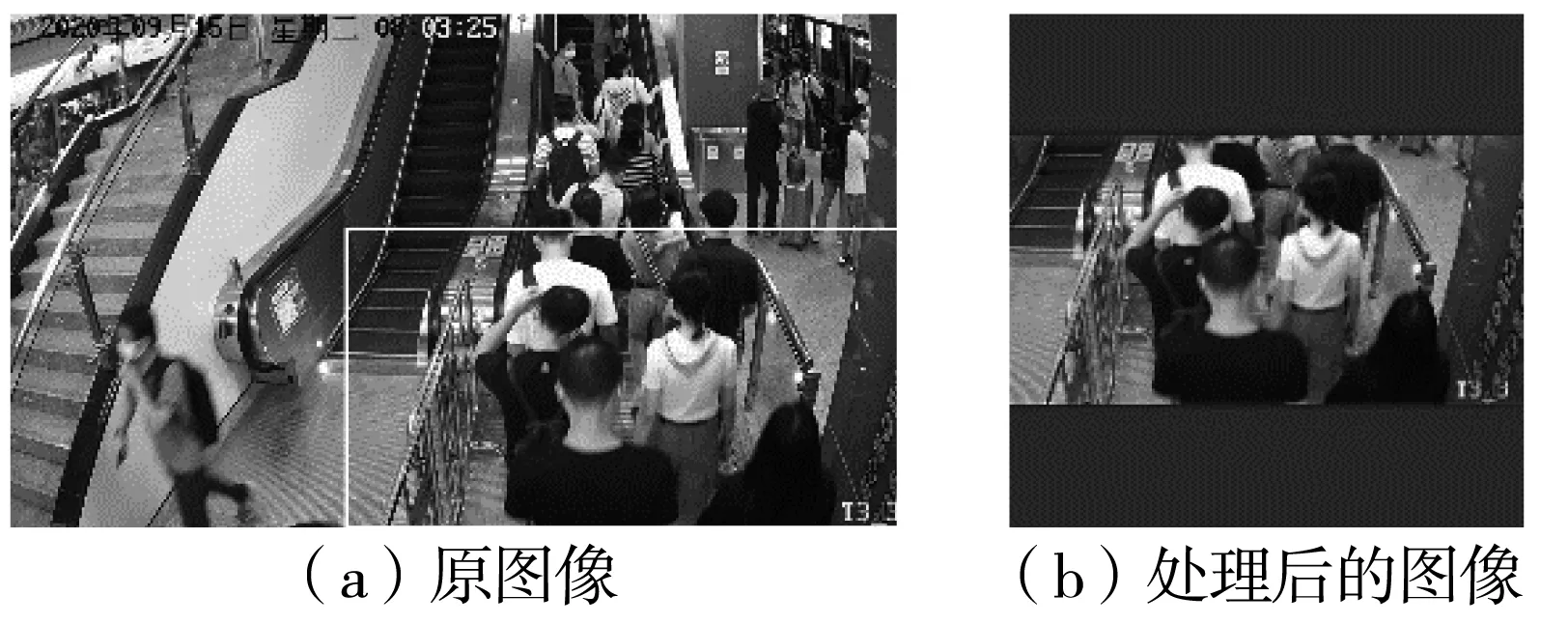
图1 图像预处理效果Fig.1 Preprocessing effect of image
1.2 YOLOv4-tiny-fast网络
相比传统特征提取方法,基于深度学习的目标检测方法具有适应性强、检测精度高等优点。相较于二阶段模型,一阶段检测算法通常具有更快的检测速度,但由于YOLO的深层次结构和巨大的参数量,各种轻量级网络(YOLO-tiny[14]和YOLO Nano[15]等)被提出。YOLOv4-tiny是最新的YOLO轻量级网络,相比YOLOv3-tiny主要增加了跨阶段局部(CSP)网络结构[16],将基础层的特征映射划分为两部分,通过跨层连接将它们合并,增强了卷积神经网络的学习能力,在减少计算量的同时可以保证准确率。考虑到嵌入式设备的算力条件及算法的使用场景,本文对YOLOv4-tiny进行优化,提出了YOLOv4-tiny-fast网络。
在YOLOv4-tiny每个CSP结构之前及最后一个池化层之后各添加一个Reduce模块。Reduce模块主要由1×1卷积、批归一化(BN)层和h-swish激活函数组成,通过卷积层将通道数进行减半压缩,同时去除无用的通道特征,减少模型参数量。h-swish激活函数hswish(·)则是利用ReLU6函数R(·)近似swish函数[17],使其保留了非线性激活函数的拟合能力,且方便在嵌入式设备端运算,既保证运算效率,又提高模型性能,其实现公式如下:
(1)
同时使用深度卷积和点卷积(Dwise)替代网络中部分传统的3×3卷积。Dwise与传统卷积的参数量比率为
(2)
其中,N为输出特征图通道数,DK为卷积核的大小。可以得出,对于3×3卷积,参数量近似缩减为原来的1/9[18]。将CSP和CBL(Conv+BN+LeakyReLU)结构中的传统卷积替换为Dwise,并分别记为DCSP和DCBL,以降低模型推理复杂度,确保在无GPU的嵌入式设备平台可满足实时性,整体网络结构如图2所示。
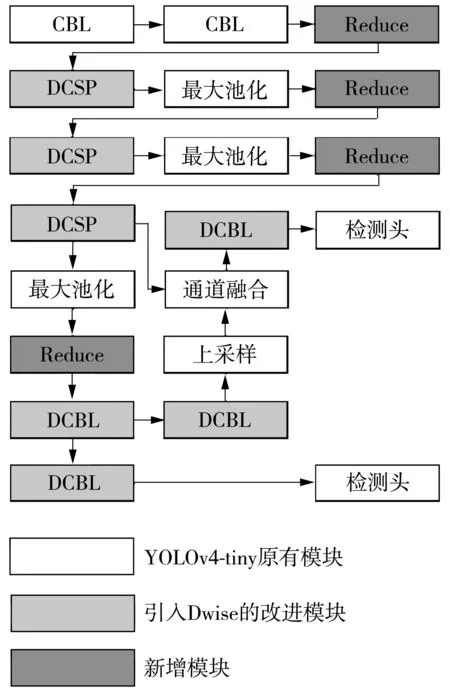
图2 YOLOv4-tiny-fast网络的结构Fig.2 Structure of YOLOv4-tiny-fast network
2 乘客跟踪
2.1 目标跟踪算法
多目标跟踪算法是计算机视觉的一项重要研究内容,在各种技术中有着广泛的运用。跟踪算法极大地影响着客流量统计的效果。基于卡尔曼滤波的跟踪算法[19-20]只利用了检测框的位置及宽度信息,对检测结果的依赖过高;基于深度学习的目标跟踪算法[21-23]利用了多种图像特征,在检测出第一帧图像中的目标后可以不再依赖检测器直接对目标进行跟踪,精度高,但计算复杂,部署在嵌入式设备时实时性差。
最小输出平方误差和(MOSSE)算法[24]是先以上一帧检测到的目标图像作为模板,与当前帧对应的候选区域图像进行卷积操作,并选取响应最大的位置作为当前帧的预测结果,更新模板后再进行下一帧的预测,当候选区域无较高响应时,视为跟踪结束。该算法提取图像特征的速度快,且本文场景下的目标特征较为简单,故该算法足以取得较好的跟踪精度。
使用检测网络得到第一帧乘客人头位置框,将其作为MOSSE算法的初始模板,跟踪效果如图3所示,可以看出基本完成了跟踪任务,但检测框形状始终不变,不能很好地适应人头的变化,并且中心已经偏移目标。
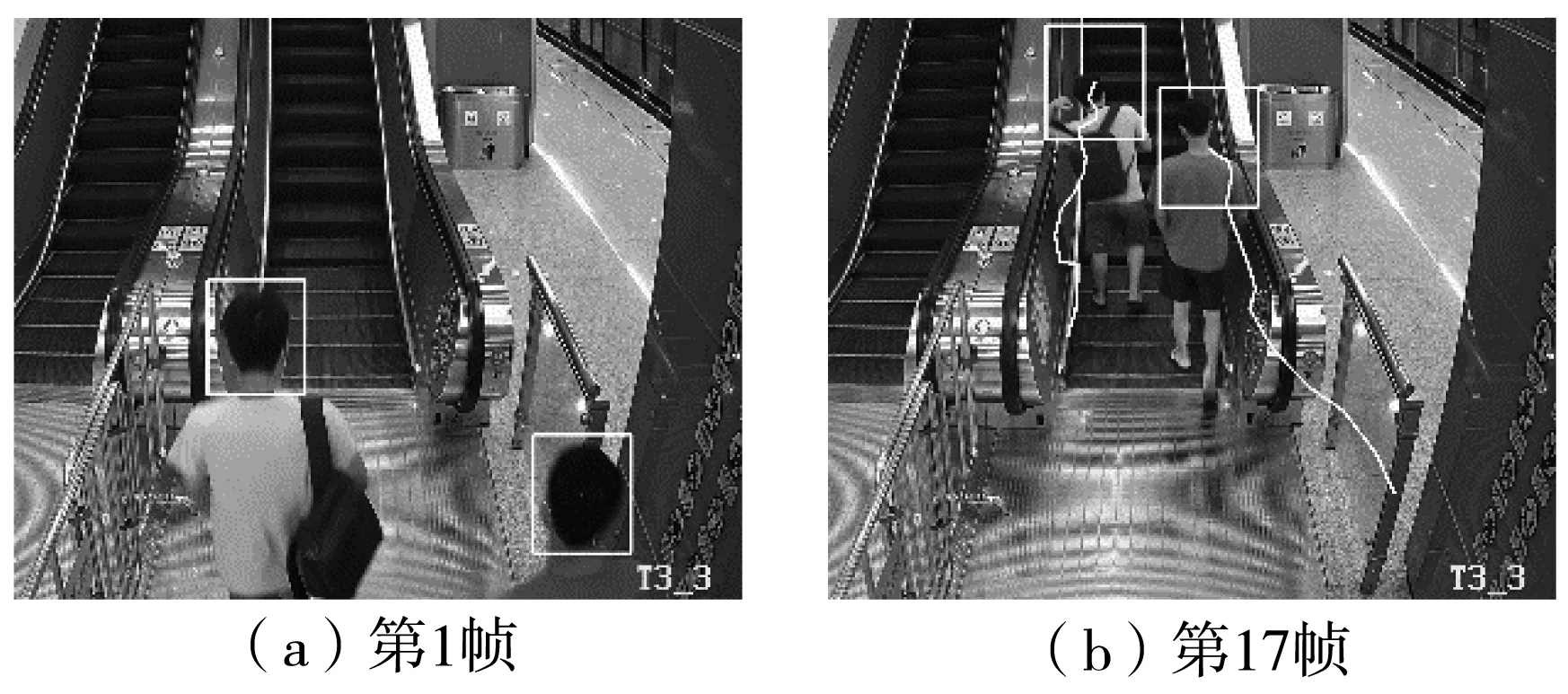
图3 MOSSE算法的跟踪效果Fig.3 Tracking effect of MOSSE algorithm
2.2 结合检测结果的目标跟踪算法
由2.1节可知,当跟踪目标的形状、颜色等特征发生变化时,MOSSE算法的预测结果会逐渐偏离,导致跟踪失败。鉴于目标检测网络较好的检测性能,利用每帧的检测结果对MOSSE模板进行更新,以抑制误差累计,提高算法的预测精度。
将检测结果与预测结果一一对应,实现目标编号及MOSSE模板更新的过程可视为一对一匹配任务,因此可考虑结合KM算法[25]实现目标跟踪。
2.2.1 优化矩阵
KM算法匹配的核心依据为优化矩阵,优化矩阵的各个元素反映了两个目标间的相似度,该值越高,二者越有可能匹配成功。Bewley等[26]使用目标间的交并比(IoU)距离来计算优化矩阵,但对于所有无交集的目标对,其值完全相同,造成相似度饱和,没有区分度,不利于后续匹配过程的参数选取;Wojke等[27]在优化矩阵中引入目标间的图像特征相似度,但图像特征的提取也导致运算量的大幅增加,增大了嵌入式设备的运算负担。因此,针对以上问题,本文设计了一种适用于嵌入式设备算力的优化矩阵,矩阵中元素dji代表检测框j与跟踪框i的相似度,dji计算方法为
(3)
dji=(Dji+1)/2
(4)
式中:Ls为检测框和跟踪框中心点之间的距离;L1为能够同时覆盖检测框和跟踪框的最小矩形的对角线距离,如图4所示。
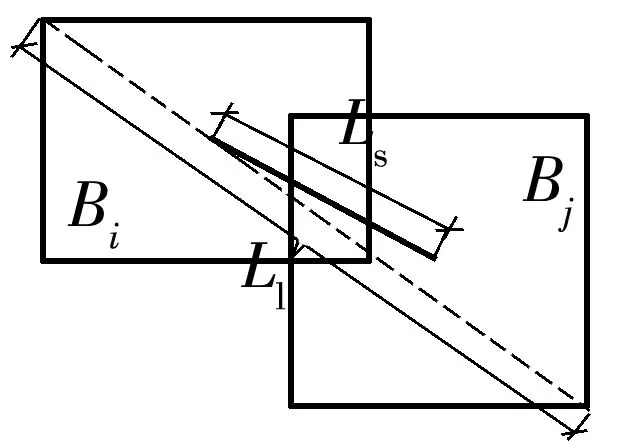
图4 相似度计算示意图Fig.4 Schematic diagram of similarity calculation
Dji的第一部分为目标之间的重叠度,反映二者的形状相似度,目标靠近时二者的相似度快速增加;第二部分为目标中心点之间的距离,即距离相似度,保证目标之间无重叠时依然可以准确地计算相似度,避免目标移动过快时无法利用重叠度匹配目标。式(4)对Dji进行归一化,使dji∈[0,1],得到匹配所需的优化矩阵。该优化矩阵计算简单,可以在嵌入式设备平台快速运行,且避免了相似度饱和问题。
2.2.2 优化矩阵裁剪
KM算法在两组数据元素数目相同且两两之间的相似度不为0时,可以对所有元素实现一对一匹配。假设跟踪框A、B与检测框C、D的位置如图5所示,则由式(3)、(4)可得此时的优化矩阵为
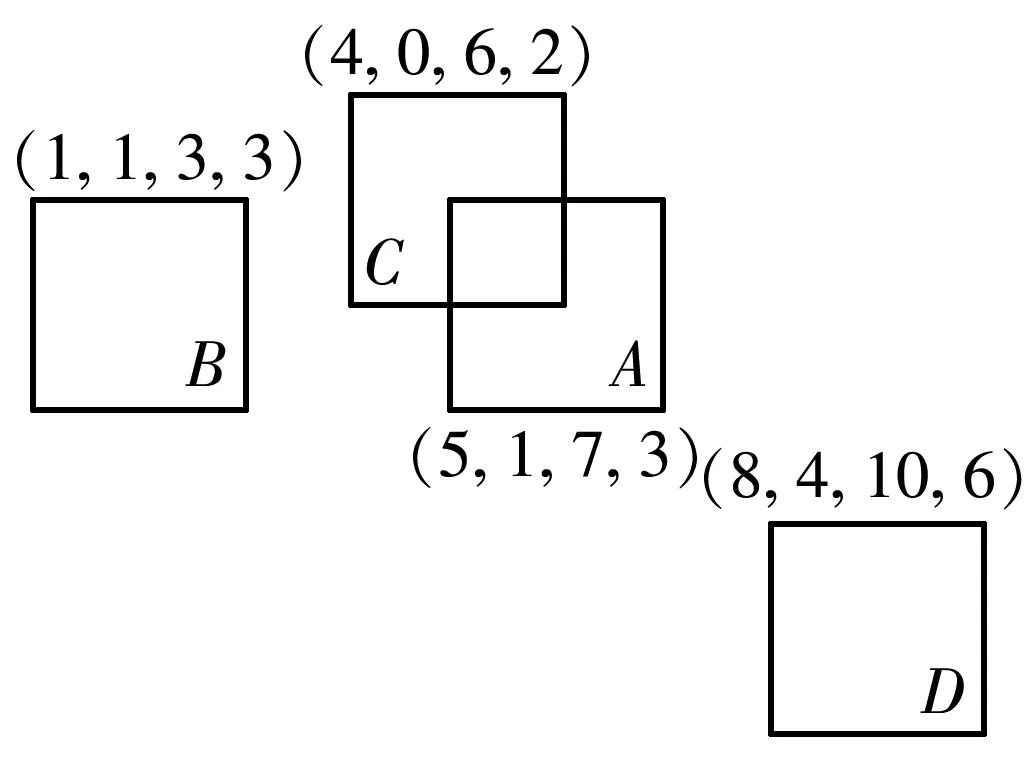
图5 优化矩阵计算示意图Fig.5 Schematic diagram of optimization matrix calculation
AB
C
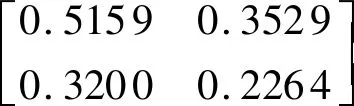
根据KM算法,最终的匹配结果是A-C和B-D。显然B、D不应匹配成功,此时应该将跟踪框B视为跟踪丢失的目标,将检测框D视为新增的目标。为此,本文对优化矩阵算法进行修改,在匹配之前裁剪优化矩阵。对于M行N列优化矩阵E,若第i列满足
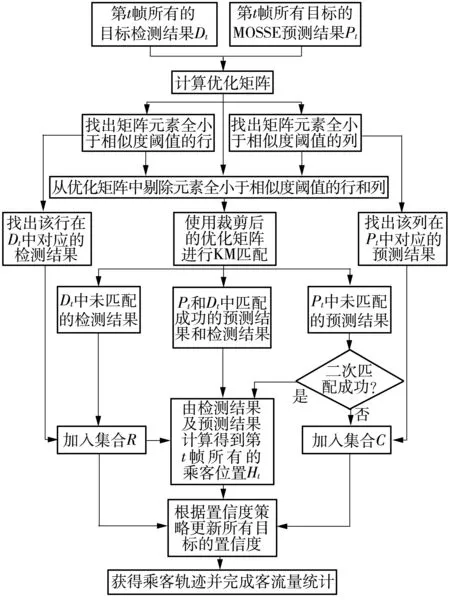
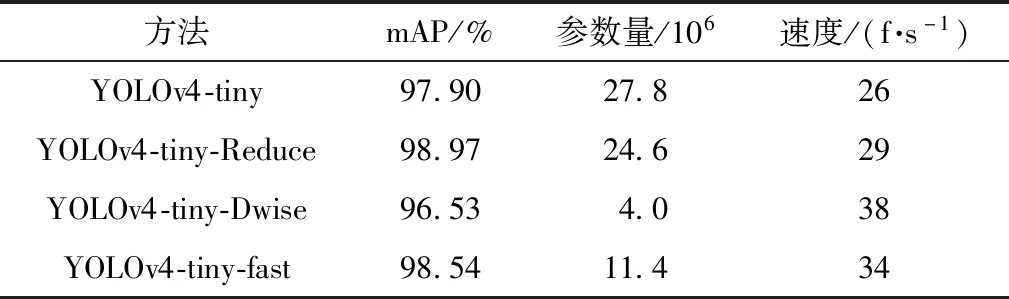
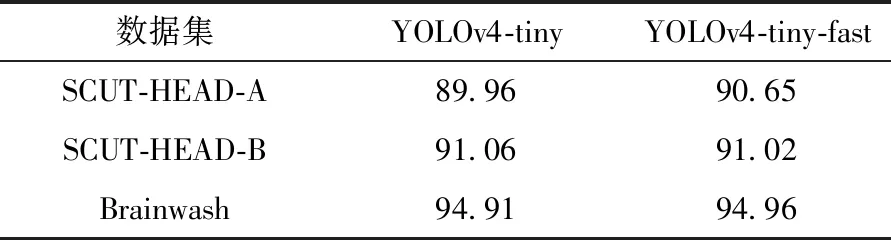
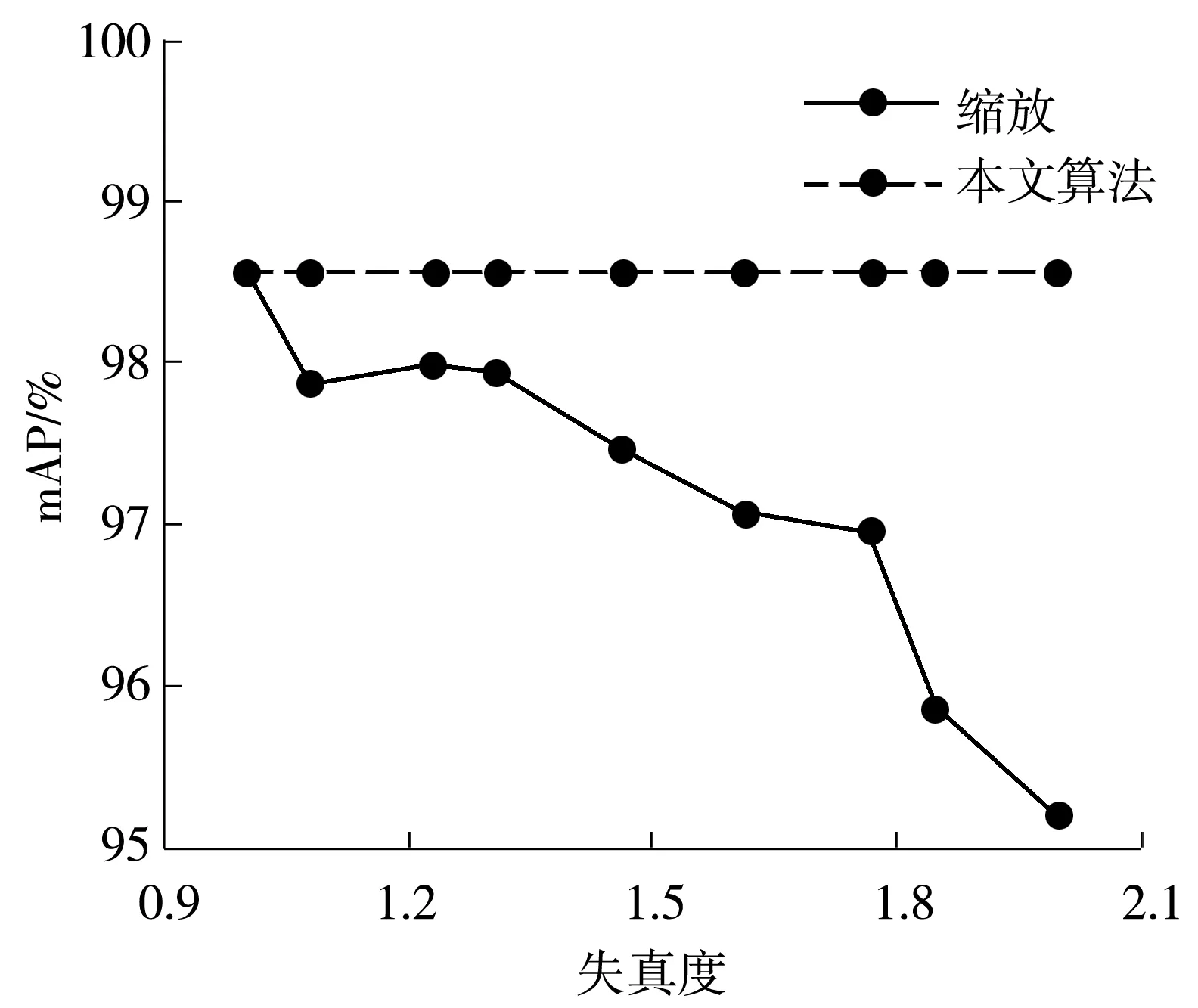
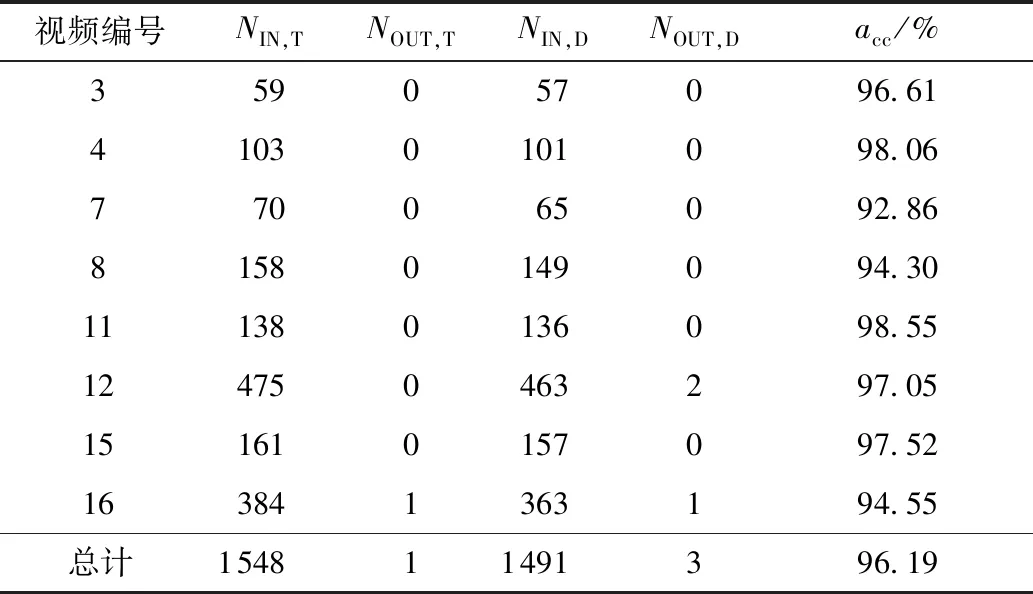
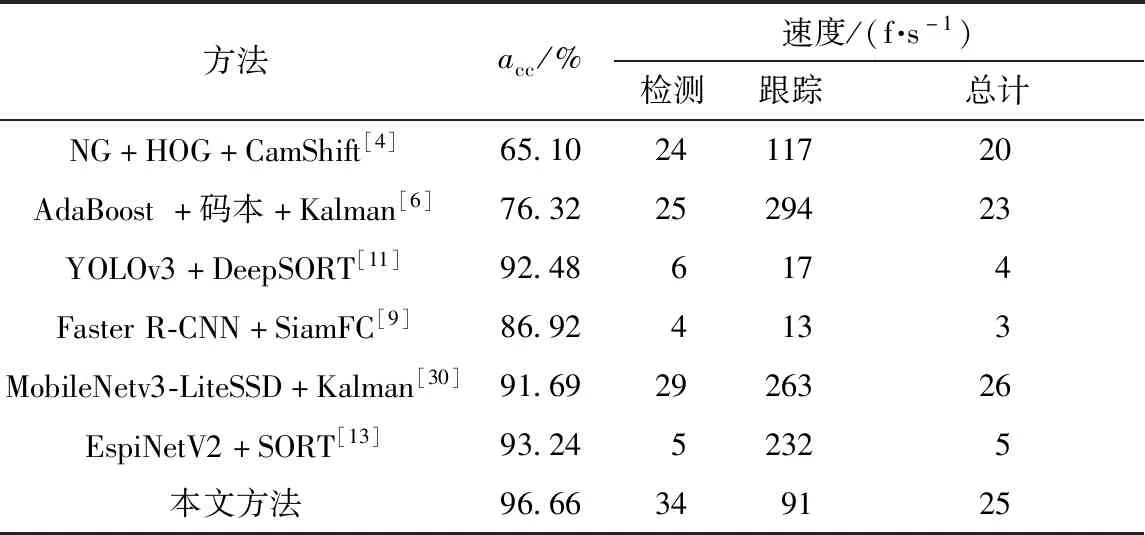
∀k∈[1,M],Eki (5) 则删除E中的第i列,其中Eki为E的第k行第i列的值,Ethres为相似度阈值。同理,若第j行满足 ∀k∈[1,N],Ejk (6) 则删除E中的第j行,得到裁剪后的优化矩阵。 被剔除的行与列直接视其匹配失败,并将裁剪后的优化矩阵用于KM匹配,既保证了匹配的合理性,又减少了匹配的时间复杂度。 2.2.3 遮挡处理 上述优化矩阵裁剪方法无法处理遮挡情况,即当某个跟踪目标被遮挡时,该跟踪目标会被视为丢失,影响客流量统计结果。朱林峰等[9]通过将当前帧检测框与过往帧跟踪框的外观特征进行对比来解决该问题,但对于外观特征相似的乘客头部,该方法的检测效果不明显,且需要消耗大量的计算资源,无法在性能较差的嵌入式设备平台实现实时运算。 通常在手扶电梯出入口处,由于靠近摄像机一侧的乘客头部较大,易对远处较小的乘客头部造成遮挡。根据这一特点,本文提出了一种遮挡处理方法,即利用已经获得的相似度矩阵对匹配失败的跟踪框进行二次匹配来完成对遮挡目标的跟踪。在获得检测框j与跟踪框i的相似度dji、检测框数目M的情况下,对于匹配失败的跟踪框i,根据 (7) 该方法允许部分检测框匹配多个跟踪框,当被遮挡目标重新出现时,可以自动实现对遮挡目标的持续跟踪,缓解了KM算法只能一对一匹配造成乘客漏检的问题,且算法复杂度低,几乎没有增加过多的计算开销。 2.2.4 置信度策略 考虑到可能存在短暂的跟踪或检测失败的情况,为保持跟踪的连续性,本文提出了置信度策略。为每个目标设定置信度,初始值为0,处理完一帧图像后,提高跟踪成功目标的置信度,降低跟踪失败目标的置信度。若置信度低于设定阈值Cthres,则视该目标完全离开监控范围。 对于跟踪目标i,其在第t帧的置信度为 (8) 该策略在目标出现时以对数规律缓慢增加置信度,在目标连续丢失时以指数规律快速衰减置信度以滤除短暂出现的误检目标。由于Cthres固定,在上述规则下人员若长时间逗留则无法及时视其离开,对后续其他目标的跟踪造成影响,为此设定ND,thres来强制剔除长时间跟踪失败的目标。 2.2.5 客流量统计流程 图6 本文客流量统计算法流程图Fig.6 Flow chart of the proposed passenger flow statistics algorithm 1)t=0时H0=D0。 3)根据式(3)、式(4)计算Pt和Dt各个元素间的相似度,得到一个J行I列的优化矩阵E。 4)依据式(5)、式(6)对E进行裁剪,将剔除的行号加入集合R(代表新进入监控画面的目标),将剔除的列号加入集合C(代表将要离开监控画面的目标),裁剪后的距离矩阵记为Ecut。 6)将R中所有目标添加至Ht中,依据式(8)增加R中目标及跟踪成功目标的置信度,衰减C中目标的置信度,并结合Cthres判定目标是否离开监控范围内。 7)利用单线计数法[6],依据乘客的运行轨迹判断乘客出入,以完成客流量统计。 其中,步骤1)至步骤6)即为本文的跟踪算法,该算法的跟踪效果如图7所示,对比图3可以看出,本文算法对人头的跟踪位置更加精确,可以准确反映出乘客头部的位置。 图7 本文算法的跟踪效果Fig.7 Tracking effect of the proposed algorithm in this paper 在实验平台上运行本文算法,不同手扶电梯出入口的实际运行效果如图8所示,其中使用ROI内的图像进行乘客轨迹跟踪,以中间的客流量统计线为基准,使用单线计数法进行客流量统计,图中左上角实时记录当前手扶电梯口出入客流量(ppIn/ppOut)、30 s内的动态客流量(pp30s)、处理速度(fps)等信息。 图8 手扶电梯出入口的处理效果Fig.8 Treatment effect of escalator’s entrance and exit 本文所指的嵌入式设备是指可以运行Linux系统的低性能微型计算机,可以配置TensorFlow、PyTorch等深度学习框架及Python、C++开发环境。本文实验硬件环境为Jetson AGX Xavier平台,用以验证该方法在嵌入式平台上的性能。使用Ubuntu18.04操作系统,主要的系统环境为Python3.7、OpenCV4.2、PyTorch1.6。程序主体使用C++编写,使用PyTorch搭建检测网络并转化为ONNX模型,使用OpenCV读取该模型用于推理,以方便程序的维护。同时,开启平台的最大电源功耗模式,以考查嵌入式平台下的极限处理速度。 针对检测网络算法,本文采用广泛使用的平均精度均值(mAP)、参数量和每秒处理帧数(FPS)作为基准指标来验证所提算法的有效性。针对跟踪算法,以客流量统计准确度(acc)、FPS为基准指标。统计准确度的计算方法为 (9) 式中,NIN,T、NIN,D分别为从上往下进入的实际人数和测量人数,NOUT,T、NOUT,D分别为从下往上出去的实际人数和测量人数。 分别截取不同手扶电梯出入口不同时刻的监控视频,并挑取关键帧手动标注图中所有乘客的头部位置,共得到训练集图像5 000幅,验证集图像500幅,测试集图像500幅。 使用4种检测算法(YOLOv4-tiny算法、添加Reduce模块的YOLOv4-tiny-Reduce算法、将YOLOv4-tiny中的卷积全部替换为Dwise的YOLOv4-tiny-Dwise算法和YOLOv4-tiny-fast算法)进行实验,将输入图像大小统一调整为416×416,使用Adam优化器,学习率初始值为0.001,并逐次递减,共迭代训练100次。以在验证集上性能最优的模型来对测试集进行预测,各检测算法的预测结果如表1所示。从表中可知,Reduce结构在减少参数量的同时提高了模型的检测精确度。将网络模型中的所有卷积全部替换为Dwise,虽然可以大幅减少参数量,但也造成了检测精确度的较大损失。本文提出的YOLOv4-tiny-fast模型与YOLOv4-tiny相比,mAP值有小幅提升,模型参数减少了59%,且检测速度提升了31%,更适合部署在嵌入式设备上。 表1 检测算法的性能对比Table 1 Performance comparison of detection algorithms YOLOv4-tiny和YOLOv4-tiny-fast网络在公开数据集SCUT-HEAD[28]、Brainwash[29]上的性能对比如表2所示,其中SCUT-HEAD包含A组校园室内数据和B组网络爬虫数据,Brainwash为咖啡厅内 表2 YOLOv4-tiny和YOLOv4-tiny-fast网络在不同数据集下的性能对比Table 2 Performance comparison of YOLOv4-tiny and YOLOv4-tiny-fast with different datasets 的人员头部数据。表2表明,本文所提检测算法在复杂数据集上的拟合能力相对于YOLOv4-tiny网络差距不大,但模型参数量更小,推理速度更快。 为验证图像失真对算法检测性能的影响,对验证集分别使用普通缩放方法和本文预处理方法缩放到(416,416)、(416,448)、(416,512)、(416,544)、(416,608)、(416,672)、(416,736)、(416,768)、(416,832)大小,以模拟实际环境下不同的ROI尺寸,各种情况的检测精度如图9所示。 图9 图像失真影响对比图Fig.9 Comparison of the effect of image distortion 可以看出,随着图像失真程度的增加,缩放操作的检测效果逐渐变差,而本文算法的检测精度不受影响,性能稳定,说明该算法可以在ROI尺度变化时保证模型的检测效果,适用于测试环境复杂、检测区域不固定的场景。 为探究本文所提跟踪算法对最终客流统计准确度的影响,截取同一车站多个时间段的监控视频,拼接在一起组成最终的测试视频,在该视频的基础上进行相应的消融实验以探究跟踪算法各部分的影响。不同优化矩阵计算方法对客流量统计准确度的影响如表3所示,可以看出:将IoU作为相似度的优化矩阵准确度最低,主要是因为在乘客运动速度较快时,IoU将变为0,无法准确反映检测目标与跟踪目标之间的相似度;广义交并比(GIoU)虽然避免了相似度为0的情况,但acc仍低于本文算法,说明本文算法的相似度度量标准更为合理。 在测试视频中不同相似度阈值对统计准确度的影响如图10所示。当相似度阈值为0,即不对优化阈值进行裁剪时,准确度只有55.53%;随着阈值的不断提高,准确度整体呈现先增后减的趋势,当阈值为0.6时准确度达到最高值98.08%,说明优化矩阵裁剪策略较大程度地提升了跟踪准确度。 遮挡处理对本文算法跟踪性能的影响如表4所示,由表中可知,相比无遮挡处理,对跟踪框的二次匹配在一定程度上减少了漏检的乘客数量,进而提高了跟踪准确度,说明该处理方法可以有效缓解乘客跟踪过程中的目标遮挡情况。 表4 遮挡处理对本文算法跟踪性能的影响Table 4 Effect of occlusion processing on the tracking perfor-mance of the proposed algorithms in this paper 置信度策略对本文算法跟踪性能的影响如表5所示。可以看出,未使用置信度策略时,漏检数大幅增加,统计准确度较低。究其原因,在检测过程中会出现目标的漏检,导致目标轨迹不连续,进而影响客流量统计,而置信度策略相当于起到了一个缓冲的作用,可以在短暂目标丢失的情况下保证轨迹的连续性,提高了统计准确度。 表5 置信度策略对本文算法跟踪性能的影响Table 5 Effect of confidence strategy on the tracking perfor-mance of the algorithm in this paper 为分析所提面向嵌入式设备的扶梯客流量实时统计方法的性能,本文截取不同车站、不同时间、不同密度下共16段手扶电梯出入口的视频序列进行实验分析,测试视频部分截图如图11所示,各子图中左上角数字为视频编号,如视频1对应编号为1的视频序列,表示其在傍晚时分拍摄于车站1的扶梯入口处,其余视频特点可依次类推。车站1、2的视频(见表6)拍摄于地面出入口,在白天和傍晚的光照条件会发生变化,而进站出站人员相对比较分散,不易出现拥挤情况,因此用于探究不同时间段即不同光照条件对算法性能的影响。车站3、4的视频(见表7)拍摄于地铁内部,光照稳定,而乘客上下扶梯较为集中,易出现乘客拥挤情况,因此用于探究不同客流密度对算法的影响。 图11 测试视频截图Fig.11 Screenshot of test video 表6 视频特点说明1Table 6 Video feature description 1 表7 视频特点说明2Table 7 Video feature description 2 使用本文方法对上述16段测试视频的统计结果如表8、表9所示,从表8中可以看出,扶梯入口处的97.11%检测准确度要优于出口处的96.19%,主要由于面部特征相较于背部特征更加复杂,检测难度更大,更容易造成漏检问题。 表8 扶梯入口处客流统计结果Table 8 Passenger flow statistics at the entrance of escalator 表9 扶梯出口处客流统计结果Table 9 Passenger flow statistics at the exit of escalator 对比视频1和2、3和4、5和6、7和8的检测结果可以看出,白天由于光照更加充足,更容易分辨出乘客头部,漏检数略低,而傍晚光照略暗,不利于乘客的检测,客流量统计准确度略有下降。 对比视频9和10、11和12、13和14、15和16的检测结果可以看出,稀疏情况下的统计准确度要高于拥挤情况下,主要是由于跟踪过程中遮挡情况的出现对统计准确度产生了一定的影响,但最低准确度依然达到94.55%,反映了本文算法对拥挤情况仍具有良好的统计性能。 16段测试视频的平均统计准确度达到96.66%,说明了本文算法在不同车站、不同时间段、不同客流密度下仍然可以保持良好的客流统计效果。 为进一步分析本文扶梯客流量实时统计方法的性能,使用本文方法和其他方法在上述16段测试视频上进行测试,并计算出对应的客流量统计准确度,结果如表10所示。相对于使用传统特征检测乘客的方法,本文方法的统计准确度具有较大的提升,检测速度也有一定的提高;相对于使用深度学习网络的算法,由于检测算法参数量和跟踪算法复杂度的降低,整体处理速度大幅提高,且统计准确度也有一定的增加。这是因为实验环境较为单一,不必使用大型检测网络,而且乘客头部特征较为相似,使得严重依赖图像特征的深度学习跟踪算法在该实验环境下的性能表现不佳,也导致试图依靠图像特征来解决遮挡问题的方法难以产生良好的效果。文献[30]方法虽然对检测模型进行了轻量化,检测速度有所提高,但未对遮挡情况进行处理,因此客流量的统计准确度较低。本文方法通过对检测及跟踪算法的改进,使其在嵌入式设备上达到了96.66%的统计准确度和25 f/s的处理速度。 表10 几种方法的统计性能对比Table 10 Comparison of the statistical performance of several methods 本文设计了一种无失真缩放方法,使得不同长宽比的客流量统计区域拥有相同的检测效果,相比传统缩放方法效果更优;提出了用于检测乘客头部的YOLOv4-tiny-fast模型,其检测准确率在SCUT-HEAD和Brainwash数据集上与YOLOv4-tiny相当,但模型大小减少了59%,推理速度提高了31%;提出了一种结合自定义优化矩阵及遮挡处理的匹配算法,测试视频的目标跟踪结果取得了96.66%的平均统计准确率;本文所提出的面向嵌入式设备的扶梯客流量实时统计方法在不使用GPU加速的情况下达到每秒25帧的检测速度,适合部署在性能较低的嵌入式设备平台,与已有的客流量统计算法相比具有较大的优势,对实际场景下的扶梯实时视频监控具有重要的意义。






3 实验结果分析
3.1 实验平台
3.2 评价指标
3.3 检测算法性能分析
3.4 跟踪算法性能分析


3.5 多场景下算法性能分析




3.6 与其他方法的统计性能对比
4 结语
