考虑负载质量影响的电液力加载系统自适应反步滑模控制
2022-07-06金晓宏
王 坤,金晓宏,2,陶 平,2,黄 浩
(1.武汉科技大学冶金装备及其控制教育部重点实验室,湖北 武汉,430081;2.武汉科技大学机械传动与制造工程湖北省重点实验室,湖北 武汉,430081)
电液负载模拟器是一种半实物仿真平台,它能在实验条件下通过所建立的模型,对飞行器舵机等设备在实际工况下所受的干扰力进行模拟,并对受控对象进行检测,其主体是电液力加载系统[1-2]。为了能够真实模拟被加载对象在实际使用过程中的负载规律,电液力加载系统必须能快速地复现各种复杂多变的载荷且要有足够的精度,因此对电液力加载系统频宽进行拓展具有重要意义。
电液力加载系统频宽的相关研究成果有不少。Heuvelman等[3]设计了一种由直流电机减速齿轮、输出扭矩传感器和微型计算机组成的负载模拟器,提高了伺服系统的频宽。Shamisa等[4]将基于定量反馈理论(QFT)的设计方法和被动容错控制(passive FTC)结合起来,提出了一种QFT-FTC方法应用于存在传感器和执行器故障的电力负载模拟器。Karpenko等[5]为用于半实物飞行仿真实验的电液负载模拟器设计了一种鲁棒力控制系统,并采用非线性定量反馈理论来扩展力跟踪频宽。李朝朝等[6]提出了一种基于主导极点参考模型的自适应控制策略,拓展了电液力加载系统频宽;该方法采用的是定质量分析,未讨论质量力在负载力中的占比问题。何龙飞[7]针对被动式电液力加载系统的频宽问题,设计了一种基于力反馈的反步滑模变结构控制器;但该控制器仅在负载较小时才能高精度、稳定地跟踪指令力信号,当负载质量达到100 kg以上时,系统的输出力含有较大误差。针对重载航空负载模拟器在进行大载荷加载时多余力较大、加载精度低等问题,欧阳小平等[8]设计了一种非线性最优前馈补偿控制器,使系统的多余力抑制能力和加载精度相比传统的前馈补偿控制器提高了50%以上;该控制器在实验过程中的负载力为50 kN,负载质量为50 kg,质量力最大仅为5 N,质量力与负载力的比值约为1∶10 000,系统惯性负载的占比非常小。姚建勇等[9]基于系统动态逆模型设计出复合控制器,提高了系统控制精度,增强了系统抑制外干扰的能力,并拓展了系统双十频宽。李建雄等[10]提出一种基于非线性扩张状态观测器(ESO)的自适应反步滑模控制方法,有效解决了轧机液压伺服系统中存在的非线性及参数时变性问题,不仅提高了系统鲁棒性而且使系统实现了快速跟踪。
对于质量力在负载力中占比较大的场合,要想较好地控制电液力加载系统快速复现各种复杂多变的载荷且保持足够精度是有较大难度的;同时,在电液力加载系统中还存在一些不确定因素,会对系统的加载精度、稳定性等产生不利影响。现有文献大多集中针对上述问题中的一个进行研究,而本文拟设计一种自适应反步滑模控制器,既适用于质量力在负载力中占比较大的场合,同时还综合考虑电液力加载系统中多种不确定性因素的影响,最后利用MATLAB/Simulink仿真软件进行系统特性分析。
1 系统结构
电液力加载系统有主动和被动两种加载方式。本文研究对象为被动式电液力加载系统(以下简称力系统),其结构如图1所示,图中仅示出了力系统中的动力元件和负载,其输出为力Fg;左侧位置控制系统(以下简称位置系统)是力系统的承载装置,其位移xp是力系统的指令信号,同时也是位置干扰量。

图1 电液力加载系统示意图
2 系统建模
根据力系统的各环节数学方程,电液伺服阀采用零开口四边滑阀,本研究中的伺服阀固有频率为1242 rad/s,系统的综合固有频率为531.12 rad/s。文献[11]指出,如果伺服阀的固有频率高于动力元件的固有频率,伺服阀的传递函数可以用一阶惯性环节表示,故这里将力系统中的伺服阀视为一阶惯性环节,其阀芯位移方程为:
(1)
式中:xv为伺服阀阀芯位移,m;τv为伺服阀响应时间,s;kv为电流-阀芯位移增益系数,m/A;u为伺服阀输入电流,A。
电液伺服阀阀口的流量方程为:
(2)
式中:q1、q2分别为通过伺服阀进入(流出)液压缸左、右两腔的流量,m3/s;Cd为薄壁小孔流量系数;w为阀口面积梯度,m;ρ为液压油密度,kg/m3;ps为供油压力,Pa;p0为回油口压力,Pa;p1、p2分别为液压缸左、右两腔的压力,Pa。
液压缸两腔的压力动态方程式为:
(3)
式中:Ee为油液有效体积弹性模量,Pa;A为液压缸活塞的有效面积,m2;xf为力加载系统活塞杆位移,活塞杆因刚度足够大而被视为刚体,故活塞杆位移等于活塞位移,m;Cip为液压缸内泄漏系数,(m3/s)/Pa;pL为负载压力,pL=p1-p2,Pa;V1、V2为液压缸左、右两腔有效容积,m3,V1=V01+Axf,V2=V02-Axf,其中,V01、V02为液压缸左、右两腔初始有效容积,m3。
由式(3)可得:
CippL(1/V1+1/V2)]
(4)
系统的负载力平衡方程式为:
(5)
式中:Fk为活塞杆受到的力,Fk=K(xp+xf),N,其中K为结构刚度,N/m;M为折合在活塞杆上的综合质量,kg;Bp为黏性阻尼系数,N/(m/s);Ff为非线性摩擦力,N。
摩擦力采用非线性连续可微函数逼近[12]:
Ff=a1[tanh(b1xf)-tanh(b2xf)]+
a2tanh(b3xf)+a3xf
(6)
式中:a1、a2、a3为各类摩擦特性的幅值大小;b1、b2、b3为与摩擦特性形状相关的系数,其取值大小决定了摩擦力变化规律。
将力系统中液压缸两腔压差作用在活塞杆上的力定义为输出力Fg,Fg=ApL;同时,因活塞杆为刚体,为了简化控制器的设计,可将活塞杆和活塞的质量等效到负载质量M中。定义组合参数θ1、θ2、θ3、θ4、θ5,其中,θ1=AkqEe,θ2=EeA2,θ3=ACipEe,θ4=1/τv,θ5=kv/τv。
由式(1)、式(2)和式(4)可得力系统的数学模型为:
(7)
其中,函数f1、f2分别为:
f1=R1/V1+R2/V2
(8)
f2=1/V1+1/V2
(9)
函数R1、R2分别为:
(10)
考虑电液伺服阀的工作死区、电信号的偏差等不确定量以及位置干扰,式(7)可以改写为:
(11)
式中:Δ1和Δ2为力系统参数不确定部分;d(t)为位置干扰。
在实际控制中,不确定量及位置干扰通常未知,故其上界很难确定,可采用自适应方法进行估计。考虑各种不确定因素的力系统数学模型为:
(12)
式中:Y代表总不确定性,其表达式为:
Y=Δ1·xv+Δ2·u+d(t)
(13)
3 控制器的设计
本节借鉴文献[13]中的自适应反步滑模控制方法,以力系统为研究对象,综合考虑力系统的非线性摩擦和液压缸容腔效应、电液伺服阀的工作死区和电信号偏差等不确定因素以及位置干扰,推导包含Y的自适应控制律,利用Lyapunov稳定性理论进行设计求解。
3.1 反步滑模控制器设计
记指令力为Fd,则控制器的目标就是使输出力Fg跟踪指令力Fd。
定义输出误差为z1,有
z1=Fg-Fd
(14)
对式(14)求导可得:
(15)
第一步:
定义稳定项
α1=c1z1
(16)
式中:c1为正常数。
定义Lyapunov函数
(17)
定义误差
(18)
则
(19)
第二步:
(20)
定义Lyapunov函数
(21)
式中:σ为切换函数,其定义为:
σ=k1z1+z2
(22)
其中k1>0,则有
(23)
设计反步滑模控制器为:
(24)
式中:h、β为正常数。
3.2 自适应控制律设计
为了避开Y的上界,采用自适应算法对Y进行估计。
定义Lyapunov函数
(25)

对式(25)求导得:
(26)
设计的自适应控制器为:
(27)
力系统不确定性Y的自适应控制律为
(28)
3.3 稳定性证明
将式(27)和式(28)代入式(26)得
(29)
取
(30)
令zT=[z1z2],则有
(31)
根据式(29)和式(31),有
(32)
又由于
|Q|=h(c1+k1)-0.25
(33)

4 仿真及结果分析
根据上文设计得出的力系统数学模型,利用MATLAB/Simulink进行力系统特性分析,自适应反步滑模控制器的Simulink模型如图2所示。

图2 自适应反步滑模控制器的Simulink模型
采用ode23s求解算法,步长设置为可变,其中最大步长为1×10-1s、最小步长为1×10-6s,计算相对误差为1×10-7s,仿真时间设为1 s。参照文献[14]设置仿真计算所用参数,如表1所示,为了讨论负载质量变化对系统的影响,将其调整为50~200 kg。
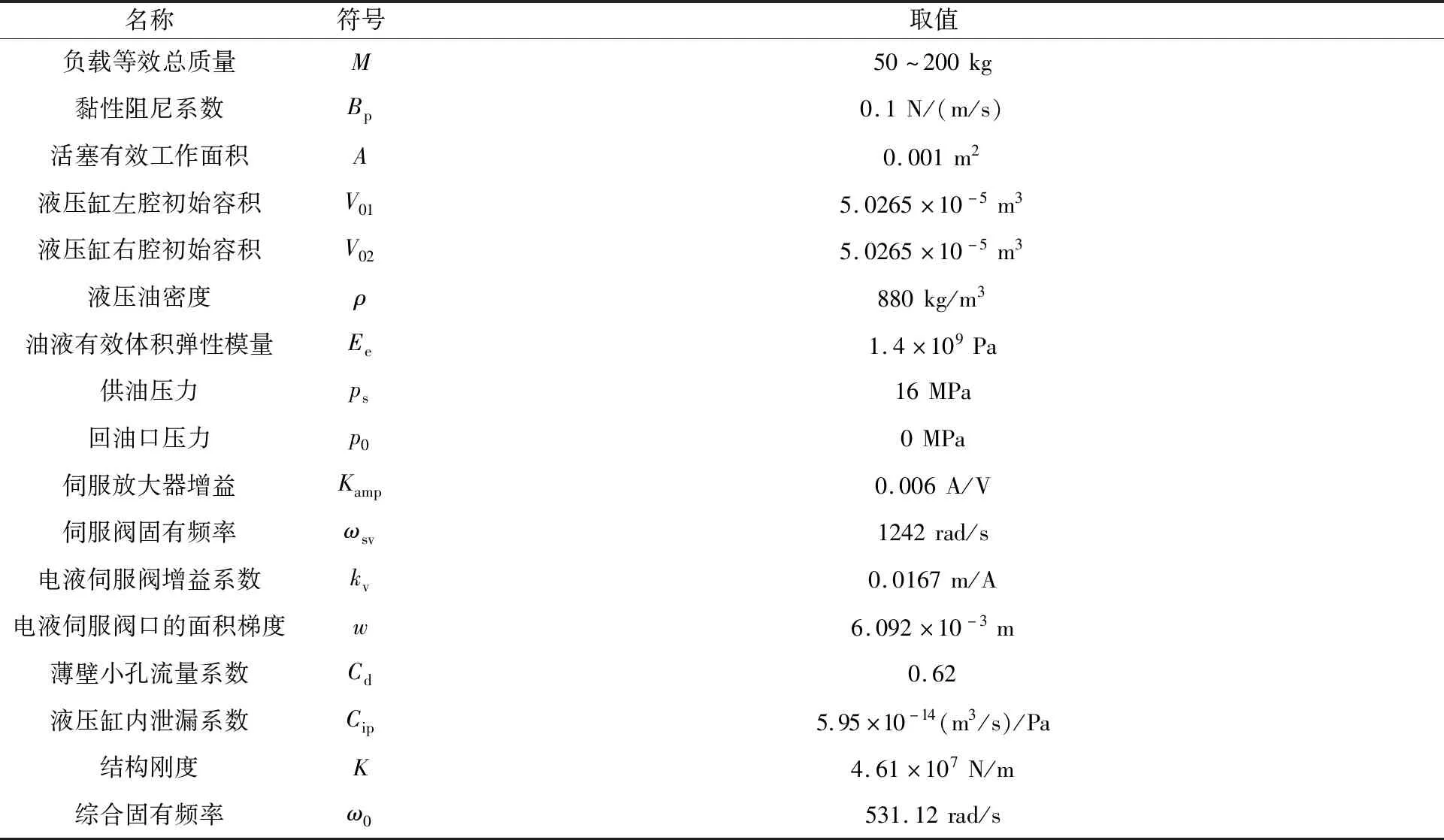
表1 电液力加载系统参数
式(6)中各摩擦特性相关参数根据文献[15]取值为:a1=177,a2=63,a3=4000,b1=500,b2=80,b3=900;式(16)中的参数c1=100。在仿真实验中经过调试得出以下参数的取值:式(22)中的参数k1=500;式(24)中的参数h=200,β=15;式(25)中的参数γ=300。
在仿真过程中,本文所设计的自适应反步滑模控制器记为ua,其实际输出力记为Fa,文献[7]中基于力反馈的反步滑模控制器记为ub,其实际输出力记为Fb,将两种控制器的输出进行对比分析。
4.1 系统响应速度和加载精度
对采用控制器ua和ub的力系统进行加载,设定负载质量为200 kg,力系统指令力分别为阶跃信号Fd=3000 N、正弦信号Fd=3000+500·sin(16πt) N。阶跃信号下力系统的响应曲线如图3所示,正弦信号下力系统的响应曲线如图4所示。
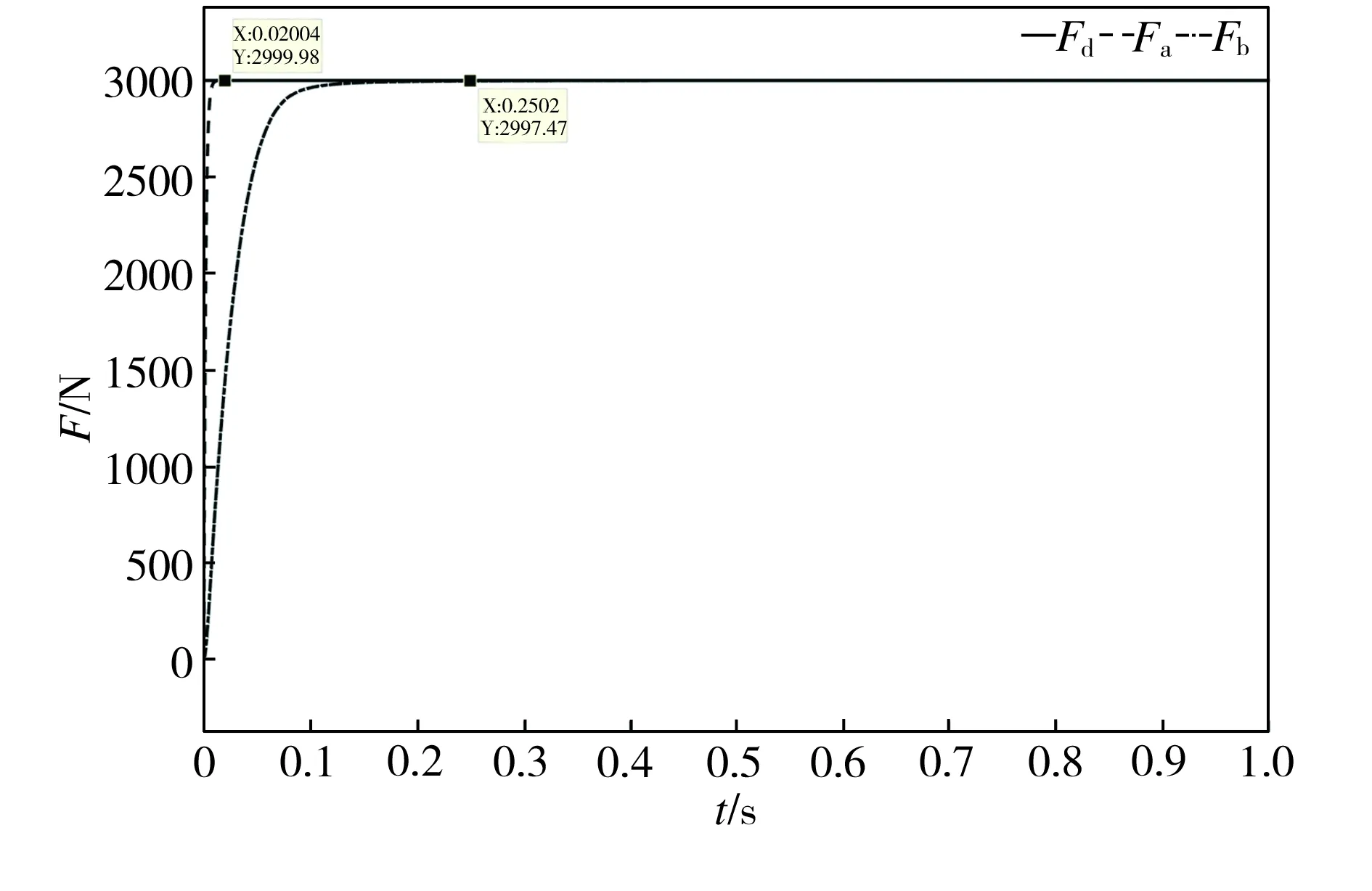
图3 阶跃信号下电液力加载系统的响应曲线
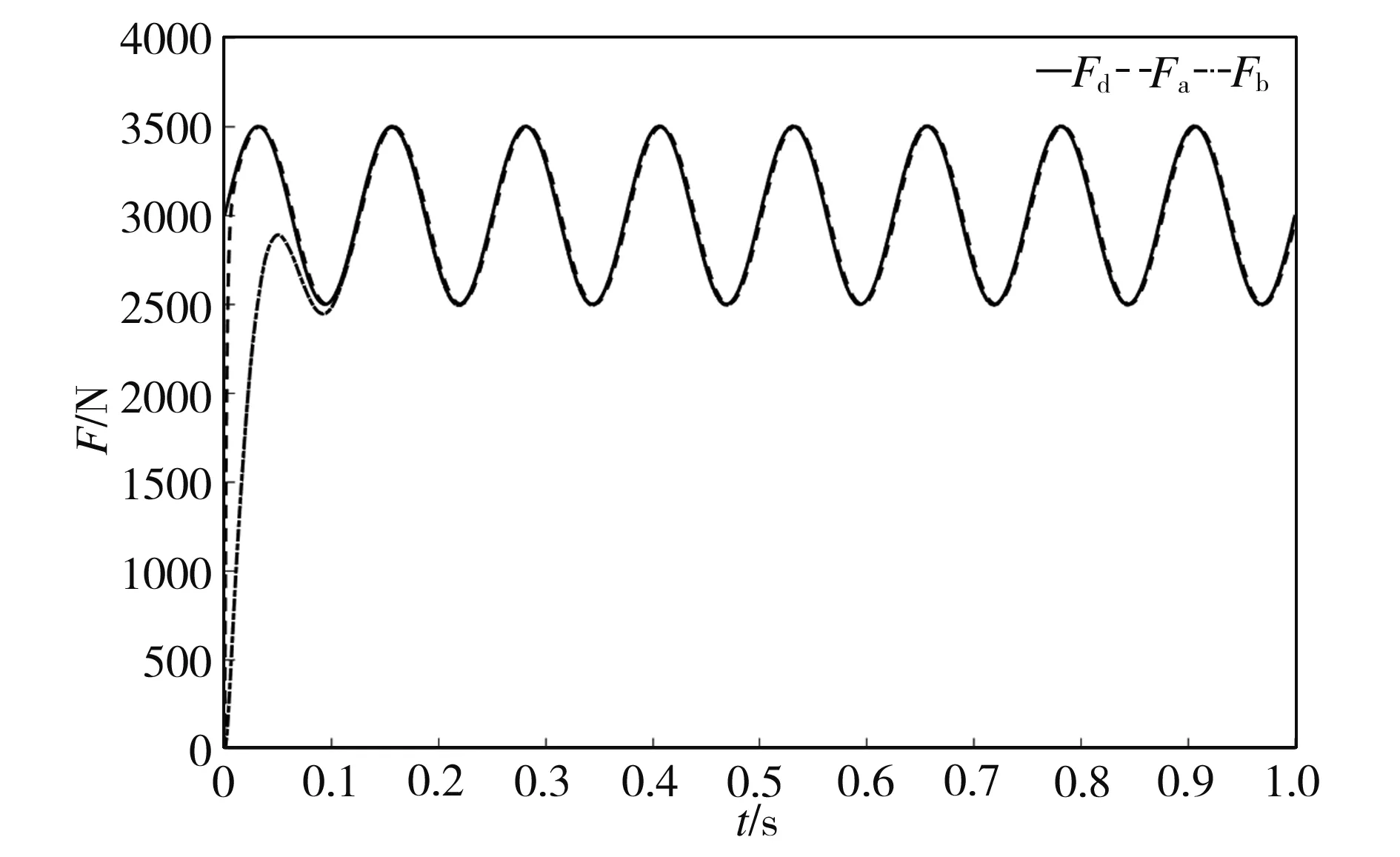
图4 正弦信号下电液力加载系统的响应曲线
由图3可以看出,当指令力为阶跃信号时,控制器ua的上升时间为0.004 s,控制器ub的上升时间为0.055 s,即本文控制器相较对比控制器的响应速度提高了约92.7%。当t=0.020 s时,采用控制器ua的力系统的稳态误差为0.02 N;当t=0.250 s时,采用控制器ub的力系统的稳态误差为2.53 N。由图4可以看出,当指令力为正弦信号时,控制器ua在0.009 s后能较好地跟踪指令信号,控制器ub在0.104 s后能较好地跟踪指令信号,本文控制器相较对比控制器的响应速度提高了约91.3%。
位置扰动是造成力系统加载精度不够的主要原因之一,同时又会使力系统的液压缸活塞行程发生变化。文献[16]研究表明,液压缸活塞行程变化过程中,液压弹簧刚度会发生改变;在液压缸活塞处于行程中间点左右0.01 m时,液压弹簧刚度变化仅占其总变化量的4%,此时系统的稳定性最差,但同时这也是最常用的工作点。
对力系统进行动态加载仿真,负载质量M分别设置为50、100、200 kg,将力系统的指令信号设为Fd=3000+500sin(16πt) N,位置系统的位置干扰信号设为xp=0.01sin(6πt) m。负载质量为50 kg时,力系统的响应曲线如图5所示,误差曲线如图6所示。

图5 负载质量为50 kg时电液力加载系统的响应曲线

图6 负载质量为50 kg时输出力的误差曲线
由仿真结果可知,当负载质量为50 kg时,系统达到稳态后,Fa的最大误差为41.77 N,Fb的最大误差为214.20 N;当负载质量为100 kg时,系统达到稳态后,Fa的最大误差为41.74 N,ub控制器不能使系统收敛到稳态;当负载质量为200 kg时,系统达到稳态后,Fa的最大误差为41.81 N,表明控制器ua在质量为200 kg时仍能保持较高加载精度,而ub控制器不能使系统收敛到稳态。
4.2 负载质量对力系统频宽的影响
设定负载质量分别为50、100、200 kg,力指令信号为Fd=3000+500sin(16πt) N,位置干扰信号为xp=0.01sin(6πt) m,此时ua所控制的力系统响应曲线如图7所示。

图7 负载质量不同时电液力加载系统的响应曲线
当负载质量为200 kg时,系统最大质量力为710.61 N,最大负载力为3.5 kN,质量力与负载力的比值约为1∶5,由仿真结果可知,自适应反步滑模控制器ua能较好地抑制质量力对输出的影响,力系统在正弦力指令信号下的输出误差在1 N之内。
4.3 液压缸活塞行程点对系统频宽的影响
所设计力系统的液压缸有效行程为0.1 m,所以在实验过程中活塞杆位移xf的变化范围为[-0.05 m,0.05 m]。初始状态时,力系统和位置系统的活塞杆同轴对顶并将负载置于行程中间点,即xf=0 m。
为探究力系统的活塞杆行程点对其频宽的影响,设定负载质量为200 kg,力指令信号为Fd=3000+500sin(24πt) N,位置干扰指令信号为xp=0.01sin(6πt)+x0m,其中x0的取值分别为-0.03、0、0.03,位置干扰信号如图8所示。仿真得到x0取值不同时力系统的响应曲线,如图9所示。
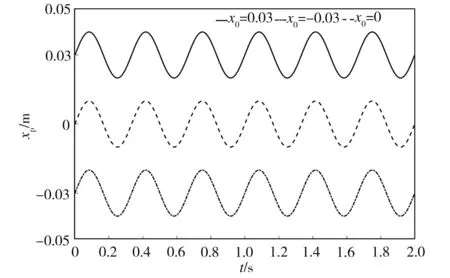
图8 位置干扰信号
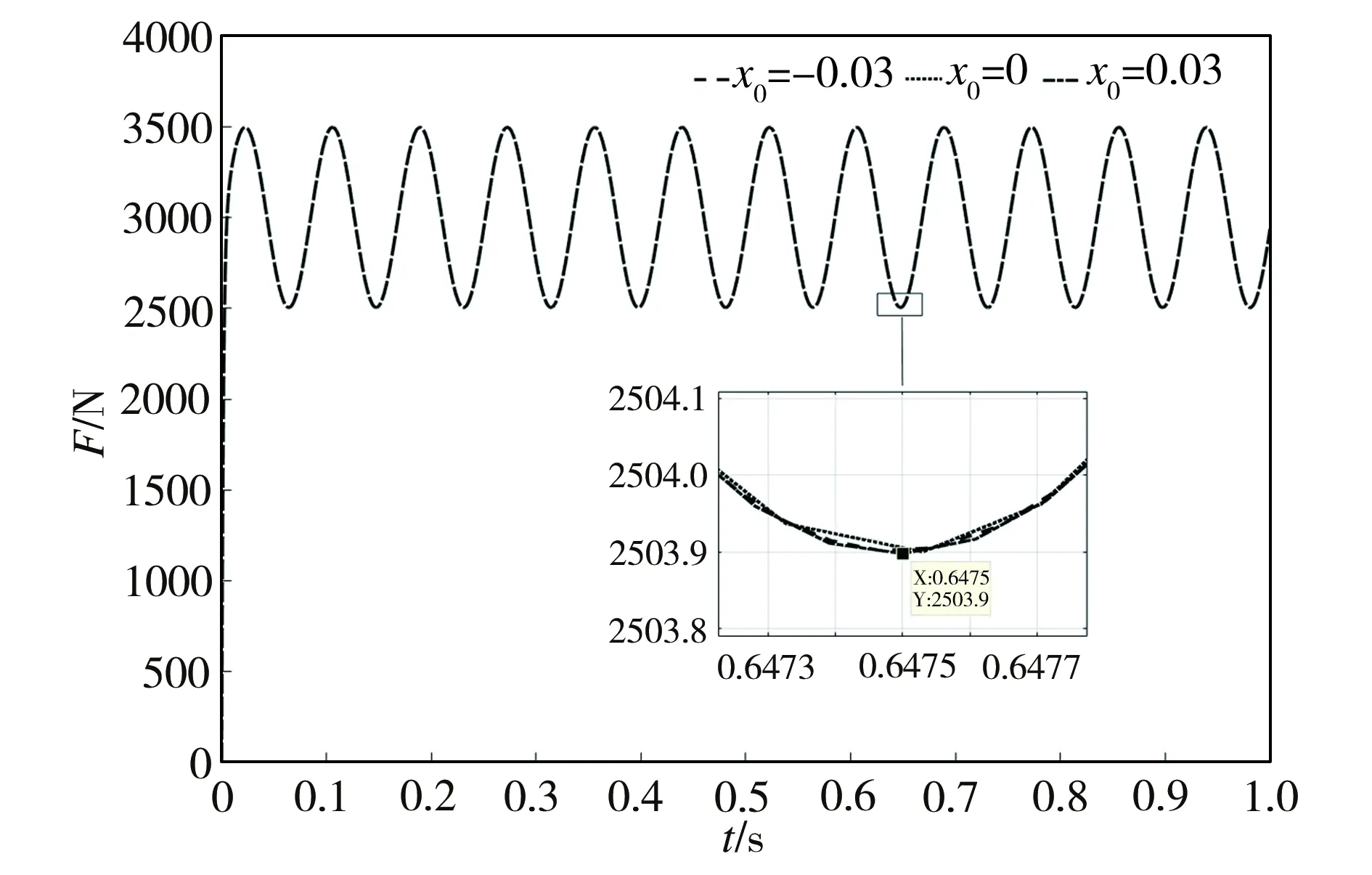
图9 x0取值不同时电液力加载系统的响应曲线
由仿真结果可知,x0=0时,力系统在输出稳定后的最大误差约为3.91 N;x0=0.03时,力系统在输出稳定后的最大误差约为3.90N;x0=-0.03时,力系统在输出稳定后的最大误差约为3.90 N。因此,行程点的变化对力系统的频宽基本不产生影响。
4.4 力系统的频宽探究
为了衡量力系统的性能,采用系统输出力信号的幅值大小和相位误差进行综合评判。设定负载质量为200 kg,力系统正弦指令信号为Fd=3000+500sin(2πft)N,位置干扰信号为xp=0.01sin(6πt) m,逐步提高力信号的变化频率f,在系统达到稳态后,通过观测输出信号的幅值误差和相位滞后来探究力系统的频宽。
仿真实验结果如表2所示。当力系统的正弦指令信号频率为12 Hz、质量力与负载力的比值约为1∶5时,力系统的输出力幅值最大误差为62.36 N,相对误差约为1.8%,输出力的相位误差均值为-7.164°,故本文设计的自适应反步滑模控制器能将力系统的频宽有效提升到12 Hz。
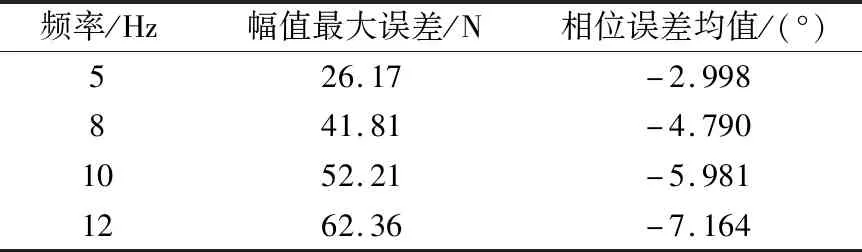
表2 不同频率正弦信号下的电液力加载系统性能对比
5 结论
(1)本文设计的电液力加载系统自适应反步滑模控制器适用于质量力在负载力中占比较大的场合,并且综合考虑了系统的非线性摩擦和液压缸容腔效应、电液伺服阀的工作死区和电信号偏差等不确定因素以及位置干扰的影响。
(2)力系统的响应速度得到大幅提升。指令力为阶跃信号时,该控制器的上升时间为0.004 s;指令力为正弦信号时,该控制器在0.009 s后就能较好地进行跟踪。
(3)所设计的控制器能较好地抑制质量力的不利影响。系统负载中质量力与负载力的比值最大为1∶5,在正弦力指令信号输入时,力系统的输出误差在1 N之内。
(4)当力系统的行程点变化时,系统稳定输出后的最大误差均小于4 N,力系统行程点的变化对力系统的频宽基本不产生影响。
(5)所设计的控制器有效拓展了力系统的频宽。进行12 Hz的正弦指令力加载时,系统输出力幅值最大误差为62.36 N,相对误差约为1.8%,相位误差均值为-7.164°。
