衡重参数对超空泡射弹有效射程的影响
2022-07-05古鉴霄党建军黄闯李代金刘富强
古鉴霄,党建军,黄闯,李代金,刘富强
(1.西北工业大学 航海学院,陕西 西安 710072;2.中国船舶集团有限公司 第705研究所,陕西 西安 710077)
0 引言
超空泡射弹是一种动能武器,通过消耗初始动能克服航行阻力,依靠剩余动能毁伤目标,具有低成本、高杀伤的特点,是大型水面作战单位对抗小型水下威胁的有效手段。防御半径和射击精度是衡量超空泡射弹作战效能的重要指标,前者取决于有效射程[1-2],后者取决于弹道稳定性。因此,增程和改善弹道特性是超空泡射弹领域的研究重点。
超空泡射弹的运动是一个典型的尾拍过程,其流体动力特性和弹道稳定机理与水下全沾湿航行器存在较大区别[3],国内外针对超空泡射弹的动态尾拍开展了相关研究。
在理论建模方面,Semenenko等[4]建立了超空泡射弹运动方程,研究了其运动稳定性,结果表明超空泡射弹无法稳定在同一深度下,可利用线性反馈规律自动调节空化器倾斜角和推进器推力矢量的偏转来实现深度稳定。Ruzzene等[5-6]建立了超空泡射弹尾拍运动的动力学模型,并提出了尾拍弹道的控制优化算法,验证了该模型和控制算法的有效性。罗凯等[7]建立了超空泡射弹尾拍过程中空泡动态变化的理论模型,分析了其振荡特性,认为在空泡充分包裹的前提下,尾拍振荡的波长仅与航行器的外形和衡重参数有关。
在数值仿真方面,金大桥等[8]基于单一变量原则研究了质量、初速度、外形和发射深度对水中枪弹射程的影响,并指出在枪弹发射推力一定的前提下,增大射弹质量会使初速度减小,但未考虑二者耦合影响下质量对射程的影响。赵成功等[9]研究了质心位置对超空泡射弹尾拍运动稳定性的影响规律,发现随着质心后移,尾拍阻力、升力的变化周期变大。姚忠等[10]研究了初始扰动对射弹尾拍过程弹道特性的影响,发现初始扰动主要影响射弹的垂直位移。Mansour等[11]对比了不同头型超空泡射弹的空泡形态和弹道特性,提出了一种延迟空泡溃灭的改进头型,可有效减小航行阻力、增加水下射程。陈伟善等[12]运用动网格技术,研究了平头弹、凹头弹、锥头弹的尾拍运动特性,提出了单侧尾拍和双侧尾拍两种典型的稳定模式。梁景奇等[13-14]基于动网格技术研究了初速、攻角对射弹尾拍运动及入水过程的影响,结果表明随着初速增大,尾拍周期减小,流体动力和角速度振荡幅值增大,俯仰角幅值变化不大,而弹体带攻角入水时尾拍特性不可忽略。
现有公开文献多集中于超空泡射弹尾拍运动特性和空泡形态变化的研究,针对射弹增程的研究相对较少,尤其缺乏对射弹增程策略的深入探讨。超空泡射弹的初始动能取决于发射能力,剩余动能取决于毁伤要求,因此超空泡射弹的有效射程取决于航行过程的能耗,即阻力特性。对于外形布局充分优化的超空泡射弹,其空化器的形状尺寸往往是确定的。在空化器和初始动能既定的条件下,超空泡射弹的尾拍阻力主要与航行速度和尾沾湿面积有关,前者受射弹质量的影响,后者与尾拍振荡特性有关,受质心位置等因素的影响。
为研究衡重参数对射弹射程的影响,本文基于均质平衡多相流理论,结合自然超空化流场数值模型和刚体运动计算模型,研究了某型射弹动态尾拍过程中的空泡形态,分析了质心位置、射弹质量对有效射程的影响规律,提出了超空泡射弹的增程方案,研究结果可为超空泡射弹的优化设计提供参考。
1 数值计算模型
研究超空泡射弹动态尾拍过程的弹道特性,需要建立空化流场与刚体运动耦合的数值仿真模型。射弹超空化流场和尾拍运动的耦合仿真涉及多相流、湍流、空化相变、刚体运动等问题,可采用流体体积(VOF)多相流模型、Realizablek-ε湍流模型、Schnerr-Sauer空化模型和6自由度刚体运动模型进行研究[15]。
1.1 多相流控制方程
VOF多相流模型的基本控制方程包括连续性方程、动量方程和能量方程,考虑超空泡射弹运动过程中温度变化不明显[15],因此忽略能量方程。当射弹速度低于900 m/s时液相的可压缩性对空化流场和射弹受力的影响可以忽略[16],因此本文采用不可压缩液体开展研究;同时认为泡内压力为饱和蒸气压3 540 Pa,忽略蒸汽相的可压缩性[12]。
1.1.1 连续方程
超空化流动是水和水蒸气的两相流动,每一项的连续方程如下:
(1)

1.1.2 动量方程
VOF多相流模型在整个流域内仅求解一个动量方程,并将所得速度场赋予各相,方程中的混合密度和混合动力黏度分别是各相的密度和动力黏度按体积分数加权平均,动量方程如下:
(2)
式中:p、v分别表示控制体的静压和速度矢量;ρm、μm分别表示混合相的密度和动力黏度,
(3)
(4)
式中:μi为第i相的动力黏度。
1.2 湍流模型
射弹高速运动的超空化流场除近壁面区域外均为充分发展湍流,流动变化剧烈。Realizablek-ε湍流模型考虑涡流黏度的影响,提出雷诺应力的数学约束条件[17],适用于时均应变率特别大的流动问题的求解[18],该模型的湍流方程如下:
(5)
(6)

1.3 壁面函数
k-ε湍流模型仅适用于湍流充分发展区的流场模拟,在射弹近壁面处湍流发展不充分,需要结合适当的壁面函数才能在模拟各种复杂流动中获得较好的精度。尺度化(Scalable)壁面函数在y+>11(y+表示标准壁面函数在该区域的无量纲距离)的网格区域满足平均速度壁面法则:
(7)
(8)
式中:κ为常数,κ=0.42;E为经验系数,E=9.81;UQ为Q点的平均流速;kQ为Q点的湍流动能;τw为壁面切应力;yQ为Q点到壁面的距离;在y+>30~60的网格区域平均速度符合对数分布率。
而在y+<11的网格加密区,仍采用平均速度壁面法则易造成数值恶化,Scalable壁面函数强制使用对数分布律来避免这一问题,适用于模拟较为复杂的流动[15],其网格分布律可表示为
(9)

1.4 空化模型
Schnerr-Sauer空化模型形式简单、计算效率高、数值稳定性强[19],因此本文选用该模型模拟空化过程中的相间质量传递,其表达式如下:
(10)

(11)
n0一般取1×1011,RB表示气泡半径,按(12)式计算:
(12)
1.5 刚体运动方程
由于射弹材料强度高,作用在弹体上的载荷引起的结构变形有限,可忽略尾拍运动过程中弹体的微小形变,将其按照刚体进行处理。刚体的空间运动具有6个自由度,在外力和外力矩的作用下会发生沿x、y、z轴方向的平动和绕x、y、z轴方向的转动。刚体的6自由度运动方程[20]如(13)式、(14)式所示:
(13)
(14)

MB=RMG
(15)
式中:MB表示作用在物体上的矩在雷体坐标系下的坐标;R表示转换矩阵;MG表示作用在物体上的矩在惯性坐标系下的坐标。
1.6 流场- 运动耦合计算流程
射弹的运动使其位置和姿态发生变化,引起流体动力和流场的变化,因此射弹的流场和运动同时变化,需要进行流场和运动的耦合仿真。给定射弹初始位置和姿态,即可按照以下步骤进行耦合仿真:
1) 仿真计算射弹在当前位置和姿态下的流场,获得流体动力和力矩;
2) 将流体动力(矩)和其他力(矩)代入(13)式、(14)式,计算平动加速度和转动角加速度,通过一次积分得到平动速度和转动角速度矢量;
3) 积分平动速度和转动角速度矢量,得到下一迭代步的位置和姿态,更新网格,开始新的流场计算。
如此往复循环,实现流场- 运动的双向耦合。
在刚体运动模型(13)式、(14)式中约束某些自由度的运动,可实现单自由度、双自由度、3自由度等多种运动的模拟。
超空泡射弹在6自由度尾拍运动过程中,俯仰角和偏航角的振荡没有明显的相位差,可近似认为水平面和纵平面运动无耦合关系,且两平面运动的振荡特性相似[15]。因此,可采用3自由度模型进行计算。由于超空泡射弹外形和运动的对称性,为提高计算效率、节省计算资源,本文采用沿x、y轴平动和绕z轴转动的3自由度模型开展仿真计算。超空化流场- 运动的耦合仿真基于Fluent软件实现,压力离散格式为Body Force Weighted,压力- 速度耦合方式为SIMPLE。
2 模型建立及仿真方法验证
2.1 问题描述
本文以某型口径为30 mm的无尾翼超空泡射弹为对象,研究衡重参数对有效射程的影响规律,射弹由圆锥空化器、锥段和尾柱段三部分组成,以空化器直径d为基准的射弹外形无量纲参数如图1所示,其中空化器直径d=5 mm。图1中,L为射弹长度。

图1 射弹外形Fig.1 Profile of projectile
采用尾部掏空并填装其他材料的组合形式实现单一地改变射弹的质心位置和质量,如图2所示。图2中,射弹主体材料为密度大、屈服强度高的钨合金,填充材料为轻质组合材料,如结构钢、铝合金、铜等。

图2 不同衡重参数的射弹示意图Fig.2 Schematic diagram of projectiles with different weight parameters
保证填充材料体积不变,仅改变其在射弹中的位置,得到4种不同质心位置LG1~LG4、相同质量的射弹,如图2(a)~图2(d)所示。以射弹长度L=240 mm为基准,质心到射弹头部的无量纲距离如表1所示,各射弹质量m均为1.24 kg。

表1 射弹质心位置表Tab.1 Table of centeroid location of projectile
在图2(d)射弹的基础上,改变填充材料体积,并调整填充材料在射弹中的位置,得到4种不同质量m1~m4、相同质心位置LG4的射弹,如图2(e)~图2(h)所示。假设射弹初始动能Ek0为155 kJ,保证初始动能不变核算初始速度,图2(e)~图2(h)所示射弹的质量和初始速度如表2所示。

表2 射弹质量和初始速度Tab.2 Mass and initial velocity of projectile
2.2 计算域选取和网格划分
当计算域径向尺寸为理论空泡最大截面直径D的36倍以上时,壁面阻塞效应对空泡形态的影响几乎可忽略不计[21],本文取外流域径向尺寸为40倍空泡最大截面直径,约50倍弹径。
经初步试算,当计算域入口距离射弹头部超过2倍弹长、出口距离射弹尾部超过4倍弹长时,超空泡射弹的流场不再发生变化,因此本文取外流域轴向尺寸为7倍弹长。
此外,射弹在单平面内的3自由度尾拍运动是面对称的,结合射弹外形的轴对称性,可建立半圆柱形流域对算例进行简化,流域范围及边界条件如图3所示。

图3 计算域及边界条件Fig.3 Computational domain and boundary conditions
本文采用移动计算域的方法开展射弹3自由度运动的数值仿真研究,计算域入口边界、远场边界和出口边界均为压力出口,压力为10 m水深,操作压力设置为0 Pa,射弹表面为壁面。
采用ICEM CFD软件对计算域划分网格,基于O-block技术实现全域结构化网格。为精确模拟湍流,在近壁面区域进行加密,使y+满足所选湍流模型的要求。为精准捕捉气液交界面,在空泡轮廓预估值的区域内进行网格细化,如图4所示。

图4 射弹网格模型Fig.4 Mesh model of projectile
2.3 网格无关性验证


图5 不同精度网格模型尾沾湿面压力系数分布对比Fig.5 Comparison of pressure coefficient distributions on wet tail of different precision grid models
图5显示,尾沾湿面在射弹轴向位置0.8L~0.9L之间,3种网格模型所得尾沾湿面压力系数变化规律较为一致,但40万网格模型所得结果峰值偏差较大,80万网格模型和160万网格模型所得结果几乎一致。因此,认为80万网格模型满足网格无关性要求,可用于开展后续研究。
2.4 仿真方法验证
Logvinovich基于空泡界面独立扩张原理建立了超空泡外形的半经验公式[22]:
(16)
式中:R表示不同周向位置x处的空泡半径;Rn表示空化器半径;Rm、Lm分别表示空泡的最大半径和长度;η为经验系数,大量实验结果表明η=0.85。
针对图1所示射弹模型,分别采用理论计算和数值仿真方法预估其在空化数为0.001 6工况下的空泡轮廓,对比结果如图6所示。由图6可以看出,数值仿真结果与理论计算结果的相对误差在7%以内,吻合度较高,因此采用数值仿真方法所得空泡形态的结果是可信的。
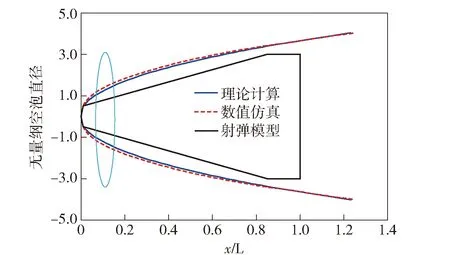
图6 不同拟合方法所得空泡轮廓对比Fig.6 Comparison of cavity profiles obtained by different methods
郭子涛[23]对直径12.65 mm、长度25.4 mm的平头弹体开展了初速度为603 m/s的自由入水试验,获取了不同时间弹体空泡形态、位移和速度衰减的变化规律。为验证本文所提超空化流场- 运动耦合数值仿真方法的准确性,针对上述平头弹体的自由入水进行数值仿真,从空泡形态、位移衰减、速度衰减三方面与文献[23]试验结果进行对比。
不同入水时刻,空泡形态的试验结果[23]和数值仿真结果对比如表3所示,可以看出数值仿真可以较好地模拟弹体入水过程的空泡形态演变。

表3 不同时刻空泡形态的试验和仿真结果对比Tab.3 Comparison of experimental and simulation results of cavity shape at different times
平头弹体入水位移、速度衰减的试验结果[23]和数值仿真结果对比如图7所示。由图7可以看出,数值仿真所得弹体入水位移和速度的变化规律与试验结果[23]一致,最大误差均不超过5%,表明超空化流场- 运动耦合的数值方法用于模拟自由运动是可靠的。

图7 弹体入水位移和速度的试验和数值结果对比Fig.7 Comparison of simulated and experimental results of velocity and displacement of projectile during water-entry
为进一步验证流场- 运动耦合数值模型模拟射弹水下全弹道的准确性,考虑有尾翼射弹和无尾翼射弹均依靠尾拍运动维持水下弹道稳定[9-10],根据文献[15]开展的射弹水平入水全弹道试验研究的结果对本文建立的数值仿真模型进行验证。文献[15]中试验所用射弹模型如图8所示,发射速度约1 050 m/s。在与文献[15]试验工况完全相同的情况下对图8所示射弹的全弹道特性进行数值仿真,验证流场- 运动耦合数值模型模拟射弹大射程运动减速特性的准确性。

图8 有尾翼射弹模型Fig.8 Projectile model with tail fin
射弹水下运动速度衰减的试验数据[15]和数值仿真结果的对比如图9所示,二者吻合度较高,5个测试点的相对误差不超过5%,表明超空化流场- 运动耦合的数值仿真方法用于模拟射弹水下射程是可行的。

图9 射弹速度的试验和数值结果对比Fig.9 Comparison of simulated and experimental velocities of projectile
3 射弹尾拍数值仿真结果
采用超空化流场- 运动耦合的数值仿真方法,对表1、表2所示4种不同质心位置、4种不同质量射弹的尾拍运动进行数值模拟,初始扰动均取10 rad/s的俯仰角速度,现以质心位置LG1、质量1.24 kg的射弹为例展示其运动特性和流场特性的数值仿真结果,对应射弹的初始速度为500 m/s、空化数σ=0.001 6、初始扰动角速度为10 rad/s。
3.1 运动特性
将位移按弹长L=240 mm无量纲化,质心位置LG1、质量1.24 kg的射弹尾拍时俯仰角随无量纲位移的变化规律如图10所示,Fy表示作用在航行器上的升力,Mz表示作用在航行器上的俯仰力矩。

图10 射弹(LG1=0.64L,m2=1.24 kg)尾拍俯仰角曲线Fig.10 Changing curve of attitude angle of projectile (LG=0.64L,m2=1.24 kg) during the,tail slapping in the cavity
图10显示,射弹受到初始扰动后,尾拍俯仰角呈正弦规律变化,且在尾拍弹道的前部分具有振幅、波长近似不变的特点,振荡幅值约1°、波长约14L。临近弹道末端,由于空泡收缩俯仰角的振荡幅值逐渐减小,最终在射程达到约600L时发散。
尾拍弹道发散前,俯仰角达到-2°(射程约580L)时空泡形态和射弹的受力分析结果如图10所示,在该时刻由于航速的衰减,所形成的空泡不足以包裹弹体;读取此时作用在弹体上的力和力矩,其中升力向下,升力系数约-0.042 5,且升力作用点在质心之前,产生使弹体俯仰角继续减小的倾覆力矩,俯仰力矩系数约-0.000 5,使得弹道发散。
图11展示了质心位置LG1、质量1.24 kg的射弹全弹道过程中速度衰减和剩余动能的变化规律。射弹的减速方程可写作:

图11 射弹(LG1=0.64L,m2=1.24 kg)剩余动能变化曲线和速度衰减曲线Fig.11 Change of residual kinetic energy and velocity attenuation of projectile (LG1=0.64L,m2=1.24 kg)
(17)
式中:Ca为平均阻力系数;A为射弹最大横截面积。求解(17)式所示的微分方程,得到射弹的剩余动能、速度随射程变化的表达式分别为
(18)
式中:E0为初始发射动能;v0为初始发射速度。
结合图10和图11可以看出,当射弹速度衰减至约 200 m/s 时弹道发散,对应剩余动能约25 kJ。射弹弹道发散后射击精度不能保证,杀伤力大打折扣,射弹失效,故弹道发散时射弹的位移就是其极限射程。
另一方面,当剩余动能衰减至毁伤要求的下限时射弹的位移即其有效射程。因此,不同用途射弹有效射程的最小剩余动能要求不同,如射弹对反舰导弹造成C级毁伤的比动能要求约 5~1 300 J/cm2[24],而射弹侵彻鱼雷、水雷的极限穿透速度约330 m/s[25],即比动能约9 500 J/cm2。从理论研究的角度出发,本文以剩余动能要求25 kJ为例开展射弹有效射程的研究。
3.2 流场特性
射弹一个尾拍周期内空泡形态的变化规律如图12所示。由图12可以看出,t=3.502 ms和 7.002 ms 时刻,射弹在泡内运动,空泡形态具有对称性;图12中其余时刻射弹尾部穿刺空泡,破坏了空泡形态的对称性;结合图12和图10,从t=0 ms时刻到t=7.002 ms 时刻射弹在空泡内形成非稳态振荡。这是因为射弹在初始角速度扰动下发生偏转,同时产生倾覆力矩,促使射弹尾部向一侧触碰空泡壁并逐渐刺穿空泡,此时在射弹尾部产生恢复力矩;随着尾沾湿面的逐渐增大,射弹尾部的恢复力矩也逐渐增大,促使尾部向空泡另一侧偏转,如此往复,形成了射弹的尾拍现象。

图12 射弹(LG1=0.64L,m2=1.24 kg)一个尾拍周期内空泡形态变化(绿色表示空泡轮廓,红色表示沾湿区,蓝色表示射弹模型)Fig.12 Change of cavity shape of projectile (LG1=0.64L,m2=1.24 kg) during the tail-slaping (green represents the cavifation outline,red represents the wetted area,and blue represents the projectile model)
由此可见,射弹尾拍运动过程中的航行阻力来自于两部分,即头部空化器阻力和尾柱段阻力。其中前者在射弹航行过程中始终存在,后者随着尾拍运动的非稳态振荡而不断变化。因此后续内容将从尾拍振荡的角度出发,研究衡重参数对射弹有效射程的影响规律。
4 衡重参数对有效射程的影响分析
本节主要研究射弹质心位置和质量对其尾拍运动规律、阻力特性和有效射程的影响,其中为方便对比不同衡重参数射弹尾拍俯仰角和尾拍阻力的变化规律,取前60L射程内射弹俯仰角和阻力的变化开展研究;而射弹剩余动能随射程的变化则在全弹道范围内开展研究。
4.1 质心位置对有效射程的影响
不同质心位置对射弹尾拍运动振荡特性、阻力系数和剩余动能的影响规律分别如图13~图15所示。

图13 不同质心位置射弹的尾拍俯仰角曲线Fig.13 Changing curves of pitch angle of projectile with different centeroid locations during tail-slapping

图14 不同质心位置射弹的尾拍阻力系数变化曲线Fig.14 Changing curves of drag coefficient for projectile with different centeroid locations during tail-slapping

图15 不同质心位置射弹的剩余动能变化曲线Fig.15 Changing curves of residual kinetic energy for projectile with different centeroid locations during tail-slapping
图13显示,俯仰角的振荡幅度随着质心后移而减小,最大振幅约1.5°,最小振幅约1°。这是因为当质心距头部超过约0.3L时,随着质心位置后移,尾拍力作用点后移,尾拍运动的振幅减小[7]。
图14中阻力系数曲线的谷值对应空化器的阻力系数,峰值对应射弹尾拍运动的总阻力系数,二者之差为射弹偏转至单侧极限位置时尾沾湿面的阻力系数。图14显示质心位置对空化器阻力系数影响不大,约为0.013;对总阻力系数的影响主要反映在尾柱段,随着质心后移,总阻力系数峰值从0.026 5下降到0.023。这是因为随着质心后移,射弹尾拍振荡幅度减小,尾沾湿面积减小,尾柱段阻力峰值减小。
定义全弹道的平均阻力系数为射弹阻力系数对射程的积分与总射程的比值,如(19)式,以平均阻力系数来评估不同射弹的航行阻力特性:
(19)


表4 不同质心位置射弹的平均阻力系数Tab.4 Average drag coefficients of projectile with different centeroid locations
图15展示了不同质心位置射弹衰减至剩余动能要求时的有效射程,从中可以看出,质心后移9%,有效射程提高14%,其中最大射程约660L,最小射程约580L,可见在保证尾拍力作用点在质心之后的前提下,质心后移有利于射弹增程。这是因为质心后移使得超空泡射弹的航行阻力降低,初始动能的损耗也随之降低,从而使射弹获取了更大的有效射程。
4.2 质量对有效射程的影响
不同质量对射弹尾拍运动振荡特性的影响规律如图16所示,可见射弹质量对尾拍振幅和波长的影响不大,3种质量射弹的振幅均约为1°。

图16 不同质量射弹的尾拍俯仰角曲线Fig.16 Change curves of pitch angles of projectiles with different masses during tail-slapping
不同质量对射弹尾拍运动阻力系数的影响规律如图17所示。由图17可见,随着质量的增大,空化器阻力系数保持0.013不变,尾部阻力系数逐渐增大,当射弹质量从m4=0.63 kg增大到m1=1.56 kg时,尾部阻力系数峰值从0.005增大到0.01。

图17 不同质量射弹的尾拍阻力系数曲线Fig.17 Change of drag coefficients of projectiles with different masses during tail-slapping
在图16中取射弹运动到俯仰角偏转至峰值时刻的空泡轮廓,以射程20L处为例,得到该时刻不同质量射弹的尾部沾湿情况,如图18所示。由图18可以看出:随着质量的增大,尾沾湿面积逐渐增大,若以尾部沾湿轴向长度为尾沾湿面的评判标准,随着质量从m4=0.63 kg增大到m1=1.56 kg,尾部沾湿轴向长度从图中的Lm4增大到Lm1。

图18 不同质量射弹尾拍至极限位置时的沾湿状况Fig.18 Wet surfaces of the projectiles with different masses when the tail slapping to the ultimate position
结合图17和图18可知,当射弹初始动能不变时,射弹质量的增大意味着发射速度的降低,对应空泡尺寸变小,在姿态角振幅受质量变化影响不大的情况下,射弹尾柱段达到最大偏角时的尾沾湿面积变大,从而引起尾部阻力系数峰值的增大。
按(19)式得到不同质量射弹全弹道的平均阻力系数如表5所示,可见随着射弹质量的增大,全弹道的平均阻力系数增大。

表5 不同质量射弹的平均阻力系数Tab.5 Average drag coefficient of projectiles with different masses
不同质量对射弹尾拍运动剩余动能的影响规律如图19所示。由图19可见:当射弹减速到相同剩余动能时,射弹射程随着质量的增大而增大,若以m1=1.56 kg射弹弹道末的剩余动能(约31.2 kJ)为标准,随着质量从m4=0.63 kg增大到m1=1.56 kg,射弹有效射程从约400L增大到约680L,提高了约70%。这是因为当射弹初始发射动能一定时,大质量射弹具有更小的初始速度,当射弹在空泡内摆动时,尽管小质量射弹的阻力系数更小,但由于其速度远大于大质量射弹,而航行阻力与航行速度的平方呈正比,大质量的射弹在航行过程中能量损失更小,有效射程更大。

图19 不同质量射弹的剩余动能变化曲线Fig.19 Change of residual kinetic energy for projectiles with different masses during tail-slapping
结合图17和图19可知,在始末一定的前提下,增大射弹质量虽然会使尾拍阻力系数有所上升,但最终有利于有效射程的提升。
5 结论
本文采用超空化流场与刚体运动向耦合的仿真方法,研究了无尾翼超空泡射弹的水下运动特性,分析了质量、质心位置等衡重参数对射弹水下弹道的影响规律,提出了超空泡射弹的增程策略。得出主要结论如下:
1) 超空泡射弹的水下弹道能够维持稳定的尾拍运动,射弹的流体动力角、俯仰角、阻力系数等重要弹道参数以近似确定的波长和振幅波动变化,其中俯仰角振荡波长约为14倍弹长,振幅约为±1°。
2) 在保证弹道稳定的前提下向后移动超空泡射弹的质心,尾拍运动中的俯仰角角振幅及最大沾湿面积减小,射弹的阻力系数减小,有效射程增加;射弹质心后移9%,有效射程增加14%。
3) 在几何外形、质心位置及水下弹道始/末动能不变的条件下,提高射弹的质量可显著增加水下弹道的有效射程;射弹质量增大150%,有效射程增大70%。
