干扰速率补偿式火炮线自稳定跟踪控制建模与仿真
2022-07-05李伟韩崇伟刘爱峰任海波胡鑫姜俊峰
李伟,韩崇伟,刘爱峰,任海波,胡鑫,姜俊峰
(1.西北机电工程研究所,陕西 咸阳 712099;2.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027;3.浙江大学 浙江省先进制造技术重点实验室,浙江 杭州 310027)
0 引言
具有两栖作战能力的自行高炮以其独有的高机动性和强突击力优势,成为突击作战部队抢滩登陆火力支援、伴随防空的重要武器装备。两栖火炮需要适应复杂环境下的作战任务。在陆地上,车体行驶受路面激励,产生颠簸,从而对火炮线指向产生低幅、高频扰动;在水中航行时,车体受自身水动力学、航向状态、风浪等的影响,车体产生大幅度低频摇荡,对火炮指向跟踪控制产生较大的随机扰动,影响着武器系统效能的发挥。火炮线指向的稳定跟踪精度是衡量两栖火炮系统性能的一项关键性技术指标。与两栖突击炮相比,两栖火炮射角高,高低俯仰运动范围更大。两栖火炮身管指向采用高低俯仰和方向回转两个通道的双轴稳定控制,火炮射角大于45°时,炮塔方位调转相对速度和加速度随射角增大而快速增大,方位系统所需功率猛增,在系统供电能力的限制下,火炮稳定跟踪控制存在“过顶盲锥”现象。为适应高动态动机座条件下的火炮调转,稳定系统对传动机构性能要求较高,传动机构的齿隙和刚度在很大程度上决定了火炮稳定性精度。在路面或波浪激励、连续射击冲击振动等多重扰动下,高射角的火炮线指向稳定控制是一个难题。火炮稳定控制技术是受车体姿态扰动特性、机械传动结构、控制策略、控制方法等多重影响和约束的综合控制技术,系统技术相对复杂,难度较高。
在空间稳定指向控制方面,由于光电设备轻,采用直接驱动方式,结构刚度大,发展迅速。火炮上装部分由于质量大,且具有强烈射击冲击扰动,使用环境恶劣,因此火炮指向稳定实现难度较大,发展较为缓慢。近年来,高炮稳定方面研究也取得了一些成果。文献[10-11]研究分析了载体姿态扰动幅值和频率,以及射击冲击扰动对火炮稳定控制力矩产生影响的规律。文献[12]提出了基于大地坐标系下速率陀螺闭环的火炮自稳定控制方法,并实现解耦,优于传动火控解算式稳定,但没有考虑动力传动刚度问题。文献[13]详细分析、计算了速率陀螺在反馈稳定环和补偿环中的应用效果,表明补偿环优于反馈稳定环,而且补偿环不影响位置外环跟踪带宽。由于传统火炮稳定跟踪稳控制系统采用高速电机配置减速机作为执行机构,难以应用速率陀螺闭环稳定。因此,干扰速率补偿稳定非常适合在火炮稳定跟踪稳定控制系统中应用。
本文针对两栖火炮海上稳定应用需求,及火炮线稳定跟踪控制要求和结构特点,提出基于大地坐标系下的干扰速度补偿式火炮线自稳定控制模型,并建立系统控制仿真模型进行验证。考虑到建模难易程度,为提高效率,只考虑典型车体姿态扰动情况下的炮塔、火炮俯仰之间的动力学模型。为便于推导速率干扰补偿量,需要列出这三部分的运动参数。因此,采用牛顿- 欧拉方法建立炮塔回转和火炮俯仰与车体姿态运动、执行电机及动力传动机构的动力学模型。为反映执行电机轴至火炮末端运动的非线性关系,只考虑齿轮副本身和传动轴扭转变形、齿隙的影响因素,忽略传动轴的弯曲变形、轴承的支撑刚度等,建立5轴直齿传动啮合刚度模型。最后分别进行等效闭环和全闭环的火炮稳定控制仿真,验证所提出模型的正确性。
1 基本假设与坐标定义
1.1 假设
1) 假设车体、炮塔、火炮俯仰部分是刚体,忽略其结构弹性变形;
2) 不考虑火炮射击冲击引起的振动;
3) 不考虑炮塔和火炮调转导致的整车质心变化。
1.2 坐标系定义
本文涉及的坐标系包括大地坐标系、平动坐标系、车体坐标系、炮塔坐标系和火炮身管俯仰部分坐标系。图1所示为运动车体上的火炮指向结构及其坐标系示意图。

图1 运动车体上的火炮指向结构及其坐标系示意图Fig.1 Schematic diagram of gun pointing structure and its coordinate system on the locomotor carrier
图1中:
大地坐标系(简称g系)与大地固结不动,将原点定为车体初始位置质心处,轴平行于水平面指向正北,轴平行于水平面指向正东,轴垂直水平面向下。
平动坐标系(简称n系)原点与车体坐标系的原点重合,随车体运动,轴平行于水平面指向正北,轴平行于水平面指向正东,轴垂直水平面向下。
车体坐标系(简称b系)的原点位于车体的摇摆中心,轴沿车体纵轴指向前方,轴沿车体横轴指向右侧,轴垂直车体纵横轴指向下方。
炮塔坐标系(简称h系)的原点为炮塔方位回转轴与方位回转平面的交点,为火炮身管轴线向炮塔方向回转平面的投影,指向弹丸射向,轴沿炮塔方向回转轴指向下,与轴平行,轴垂直于轴与轴构成的平面向右。
火炮身管俯仰部分坐标系(简称p系)的原点为火炮俯仰转动轴与火炮身管俯仰平面的交点,轴与火炮身管轴线重合、指向弹丸射向,轴与耳轴重合、指向炮塔右侧,轴垂直于轴与轴构成的平面指向下。
1.3 坐标转换关系

(1)
式中:


(2)


(3)
式中:为火炮俯仰部分相对炮塔的转角。则火炮在n系下的指向可用(4)式解算:

(4)
这就是后续讨论采用等效闭环控制的依据。
炮塔角速度为
(5)
式中:h、h、h分别为炮塔轴、轴、轴的角速度;、、分别为车体轴、轴、轴的角速度。炮塔角加速度为
(6)
火炮俯仰部分角速度为

(7)
式中:p、p、p分别为火炮身管俯仰部分轴、轴、轴的角速度。
火炮俯仰部分角加速度为

(8)
p系角速度与n系下角速度的关系为
(9)
因此
(10)
(10)式可以采用“积分”或4阶龙格- 库塔数值法求解,得到火炮在g系下的指向。若忽略各个相关传感器的测量误差、初始对准误差以及传动误差,(10)式与(7)式解算结果等效。
2 干扰速率补偿式稳定控制算法
火炮指向可由捷联惯性导航(简称惯导)提供测量基准,捷联惯导的角度基于n系测量得到,相对于车体运动角速度,n系在g系绕轴转动缓慢得多,在较短的运动距内,n系可近似平行于g系。根据坐标系定义,g系是静止坐标系,可将捷联惯导近似看作基于g系的测量输出。
该稳定控制模型是在传统火炮随动基础上增加了干扰速度补偿环节构成的。火炮、炮塔传动机构、电机调速的电流控制和速度控制环节、位置控制环节、高低和方位的指令前馈控制环节都与传统控制环路保持一致。则干扰补偿中的干扰速率计算是该稳定控制模型的重要环节,本节重点讨论。
2.1 基于g系的干扰速率非解耦补偿(a方案)
根据(7)式,令
解得

(11)
根据(5)式,也可以用炮塔轴、轴陀螺和车体陀螺组合测量,所得结果与(11)式等效,即
(12)
(13)
(14)
(15)

2.2 基于n系的干扰速度解耦计算与稳定控制(b方案)
将(7)式代入(10)式,可得


(16)
令
解得
(17)

(18)
由于稳定是通过控制电机旋转实现的,同理令

(19)

基于g系下的干扰速率补偿式自稳定控制模型就是在传统随动系统中增加了干扰速率计算(18)式及其各自前馈补偿校正环节构成的稳定系统,其原理见图2。根据具体的应用和位置外环的反馈点不同,又分为等效闭环控制和全闭环控制。等效闭环采用(4)式解算的火炮指向角度作为反馈,高低和方位侧角器值、采用等效仪表链方式获取,将动力传动非线性排除在位置闭环外,视动力传动非线性为电机轴的力矩干扰。而全闭环是捷联惯导直接测量身管指向,故位置反馈是根据(10)式获得,将动力传动非线性包含在位置闭环内。等效闭环和全闭环控制根据应用需要将分开讨论。根据图2,干扰速率补偿的本质是对干扰进行的开环补偿,不会激励系统谐振。只不过开环补偿准确的前提是获得调速系统精确的数学模型。否则会出现补偿不到位、精度不高的现象。
图2 火炮线稳定跟踪控制系统原理框图Fig.2 Schematic diagram of gun line stabilizing and tracking control system
3 动力学模型
3.1 方位炮塔和火炮俯仰部分动力学模型
设炮塔方位轴力矩=[h,h,h],火炮高低俯仰轴力矩=[p,p,p],考虑质量偏心矩、摩擦干扰力矩和火炮高低轴的反作用力矩,得到方位炮塔、火炮高低俯仰部分动力学方程:

(20)

3.2 电机及动力传动动力学模型
采用三相交流永磁同步电机(PMSM)作为稳定系统的执行机构,PMSM在坐标系下的电压和转矩方程为
(21)
式中:、、、分别为电机的轴、轴电流和电压;、为电机定子轴、轴电感;为定子绕组的电阻;为电机输出的转矩;为角速度;为电机极对数;为电机转子磁链。
由于方位和高低动力传动减速机的原理相同,以图3中方位传动机构为例进行介绍。图3中输入轴为输入轴端2,数比为1575,驱动座圈并带动炮塔转动,为齿轮的齿数,=1~9,为齿轮的模数。考虑齿轮啮合刚度及侧隙、传动轴扭转刚度等,建立如下电机轴、传动、负载耦合的动力学模型:

图3 方位动力传动减速机原理Fig.3 Schematic diagram of azimuth power transmission reducer

(22)

(23)

(24)

(25)

(26)

(27)

(28)

(29)

(30)

4 系统控制模型
为验证基于g系的干扰速率补偿稳定控制模型,在传统随动三环控制结构的基础上增加干扰速率补偿环节,其他各环控制器采用经典控制方法,各控制器以先内再外的顺序进行设计。系统采用表贴式三相交流永磁同步电机(PMSM)作为执行机构,由成熟的SVPWM控制IGBT完成功率驱动控制。电流环采用=0 A的矢量控制方法,利用电流环得到所需要的控制力矩,电流环控制器采用PI控制,其参数采用零极对消和期望极点配置设计方法。速度环PI控制器采用最佳中频宽设计方法,并结合干扰速度前馈补偿的复合方法。位置环PI控制器也采用最佳中频宽设计方法,并结合干扰指令前馈补偿的复合方法。同时,方位系统采用成熟的双电机拖动协调消隙控制,以提高传动刚度和减小末级传动齿隙,改善回路的动态特性。
5 仿真验证
根据图2,火炮稳定系统仿真模型主要由车体姿态扰动输入、方位伺服驱动及传动模型、高低伺服驱动及传动模型、炮塔及火炮的双轴动力学模型、惯导姿态解算模型、干扰速度补偿模型、位置控制稳定跟踪控制模型组成。系统仿真涉及参数众多,涉及火炮稳定系统的主要机械结构参数为:炮塔质量=4 100 kg;炮塔回转中心在车体的位置==0 m,=09 m;炮塔质心在炮塔中的位置=0237 m,=0013 m,=0404 m;火炮俯仰部分质量=1 500 kg;火炮俯仰中心在炮塔的位置坐标=0 m,=0 m,=096 m;火炮俯仰部分的质心位置=05 m,=0 m,=0 m;炮塔及火炮俯仰部分的惯量矩阵:
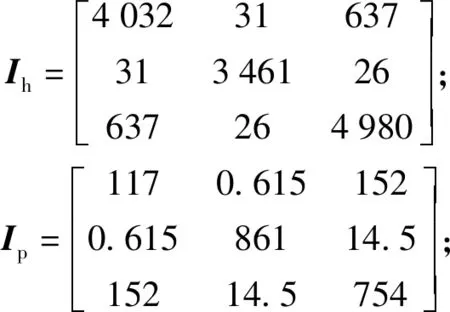
b系下的火炮方位角和高低角为0°。执行电机PMSM参数如表1所示。

表1 PMSM参数Tab.1 PMSM parameters
为了与文献[12]提出的稳定方法进行比较,仿真时车体姿态扰动输入按该文献提供的一种典型车体运动数据进行仿真,设车体速度=15 km/h,车体航姿、、三轴同时旋转的各轴幅值为7°,周期为2 s,即频率为05 Hz,相位差为π2 rad,车体姿态干扰较为恶劣。分别进行理想传动刚度条件下的非稳定瞄准、稳定瞄准、稳定控制解耦、大角度调转稳定、稳定跟踪。考虑传动弹性下的等效闭环稳定瞄准、等效闭环稳定跟踪瞄准,以及全闭环下的稳定瞄准、稳定跟踪瞄准,首先采用不考虑弹性条件下对模型原理性验证,然后考虑一定传动弹性具有工程应用背景下对模型适用性进行验证讨论。
5.1 不考虑传动弹性条件下的仿真
将系统的方位向和高低向减速机视为传递转速和转矩的理想部件,具有理想刚度,不存在齿隙和弹性。
511 稳定瞄准与非稳定瞄准效果对比
方位和高低的指令皆为65°(约1 0833 mrad)在姿态扰动下的干扰速率补偿式稳定和非稳定曲线如图4所示。从图4中可见:具有稳定瞄准和非稳定瞄准结果对比非常明显,采用干扰速率补偿后,有效地抵消了车体姿态干扰,使得火炮指向能够迅速指向目标方向并保持,实现火炮指向稳定;在火炮没有稳定控制条件下,采用常规三环控制的随动系统难以实现稳定;在理想传动刚度条件下,可以验证等效闭环和全闭环控制等效。
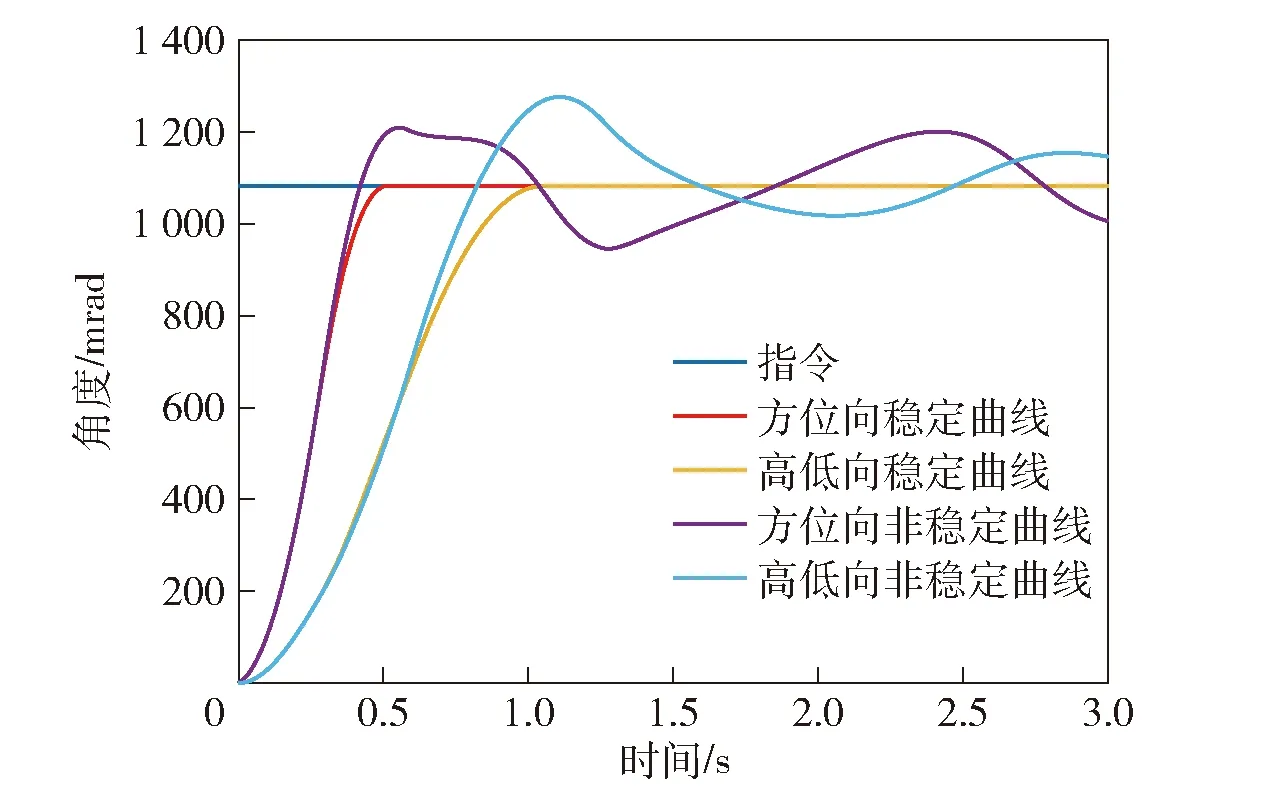
图4 车体姿态扰动下的干扰速率补偿式稳定和非稳定曲线Fig.4 Stability and unstability curves of disturbance rate compensation under body attitude disturbance
512 控制解耦与非控制解耦稳定瞄准结果对比
采用a、b两种方案的干扰补偿式稳定瞄准曲线如图5所示。由图5可见,a、b两种方案下都可以实现稳定瞄准,但a方案调转时间长,约2 s以后高低和方位几乎同时到达并稳定于误差带中;采用a方案,高低向和方位向是存在耦合的,若采用a方案进行高低向和方位向同时稳定跟踪,仿真很容易证明具有较大的跟踪误差,而b方案明显快于a方案实现稳定瞄准;由于调转加速度和速度不同,方位向明显快于高低向到达稳态误差带,方位向约08 s实现稳定控制误差05 mrad,高低向约11 s到达稳定误差带,稳定误差约01 mrad,高低向和方位向相互几乎不影响,与文献[12]g系下的速率陀螺直接闭环精度相当。

图5 采用a、b两种方案的干扰速率补偿式稳定曲线Fig.5 Stability curves of interference rate compensation using Schemes a and b
通过对比图6和图7可知,采用b方案稳定,火炮指向在n系下的俯仰轴和方位回转轴的角速度各自快速趋于0 rad/s,二者并无关联,表明b方案实现了n系下的速度解耦。在图8中,采用b方案稳定,火炮指向在p系下的俯仰轴和方位回转轴的角速度几乎同时趋于0 rad/s,二者关联度高,方位受高低影响明显,表明火炮指向在p系的角速度存在耦合。图6和图9表明,采用a方案进行稳定,火炮指向在p系、n系下俯仰轴和方位向回转轴的角速度二者均相互关联,存在耦合。
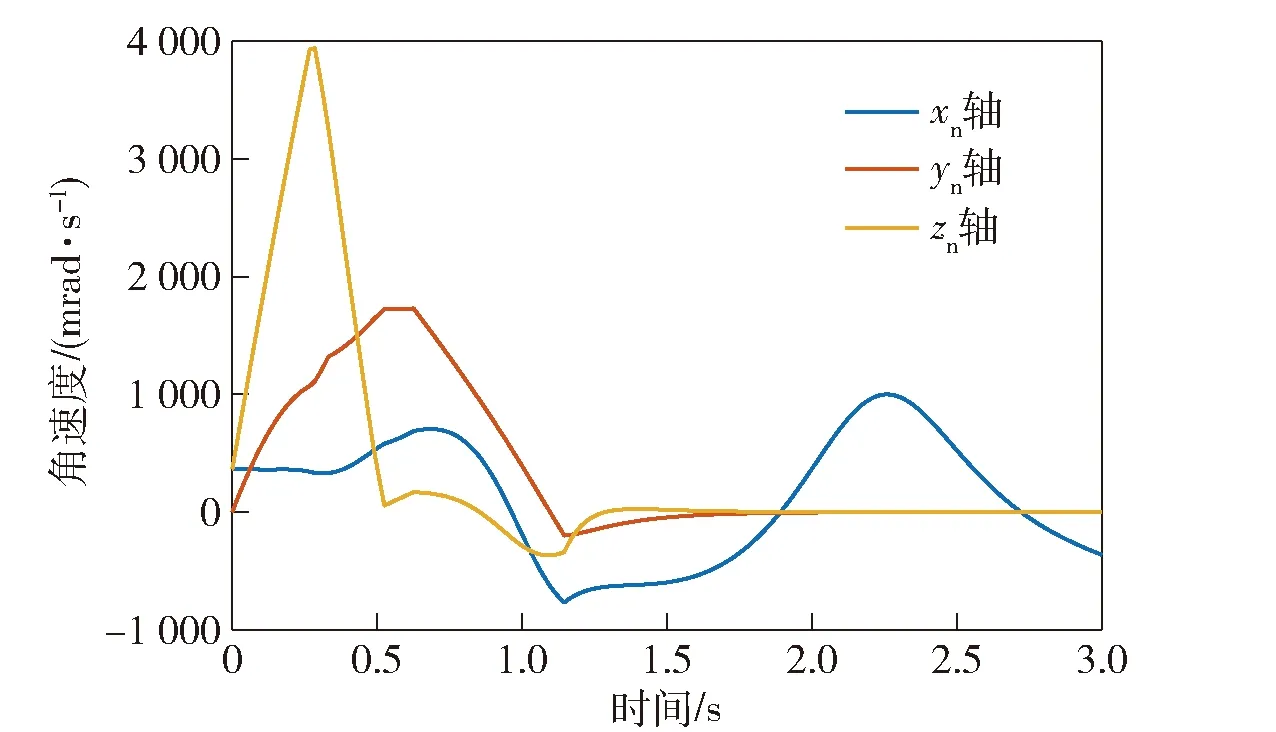
图6 采用a方案稳定下的n系角速度曲线Fig.6 Angular rate curves of n coordinate system stabilized by Scheme a
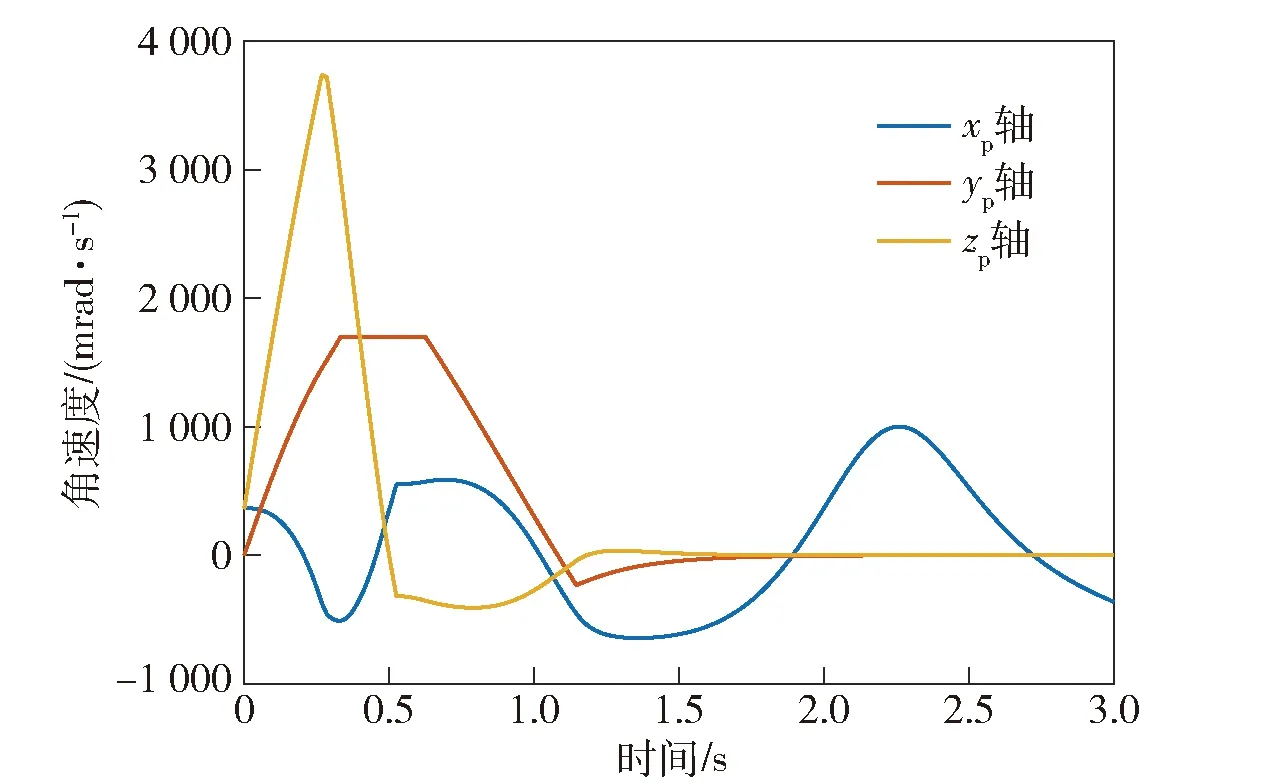
图7 采用a方案稳定下的p系角速度曲线Fig.7 Angular rate curves of p coordinate system stabilized by Scheme a

图8 采用b方案稳定下的n系角速度曲线Fig.8 Angular rate curves of n coordinate system stabilized by Scheme b
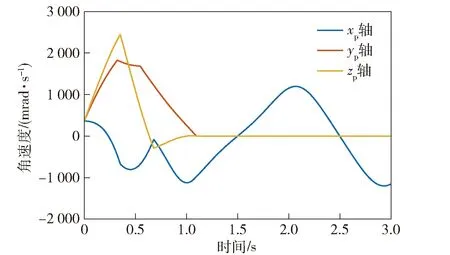
图9 采用b方案稳定下的p系角速度曲线Fig.9 Angular rate curves of p coordinate system stabilized by Scheme b

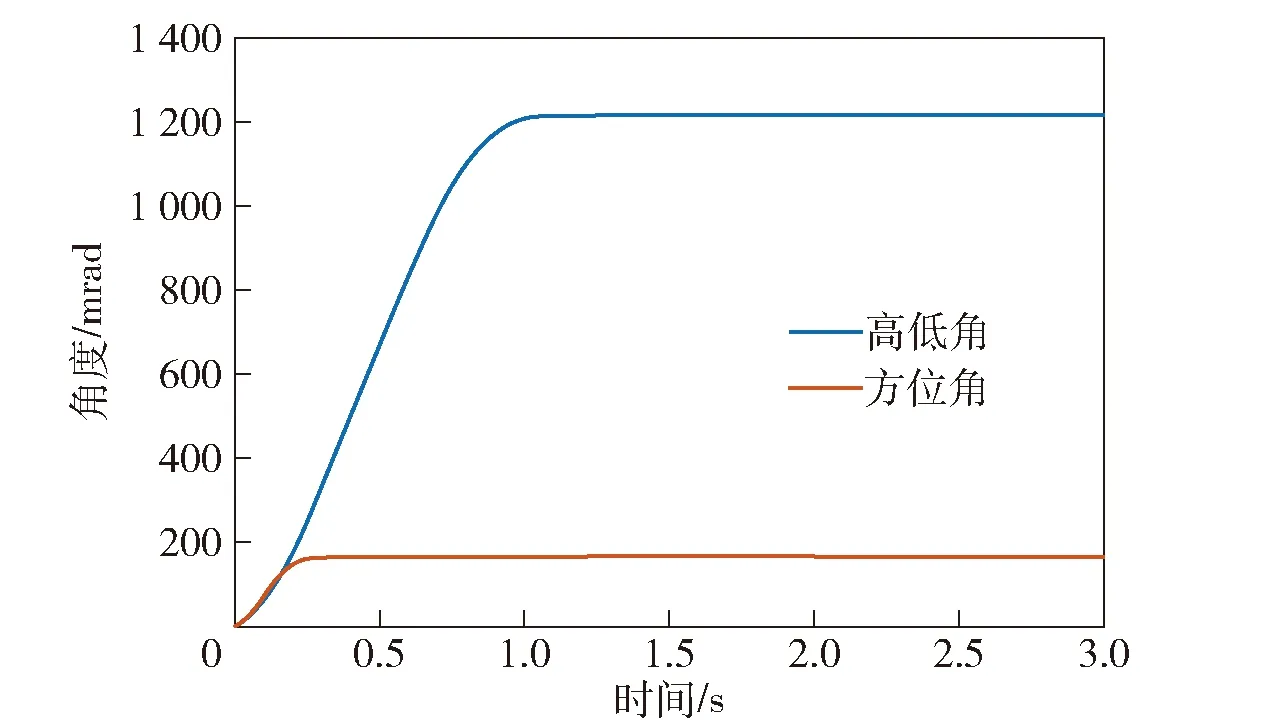
图10 采用b方案的单向大角度调转稳定曲线Fig.10 Stability curve of one-way large-angle rotation using Scheme b
513 稳定下的正弦跟踪
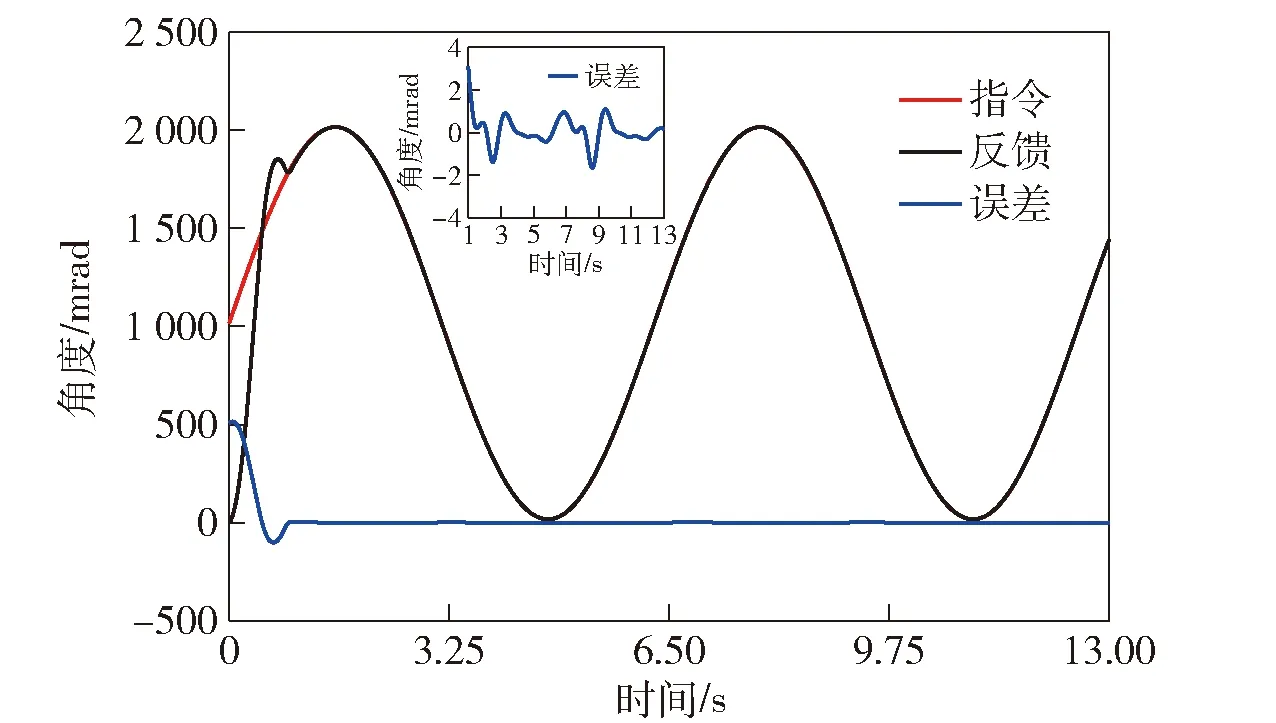
图11 方位向稳定跟踪曲线Fig.11 Azimuth stability tracking curve
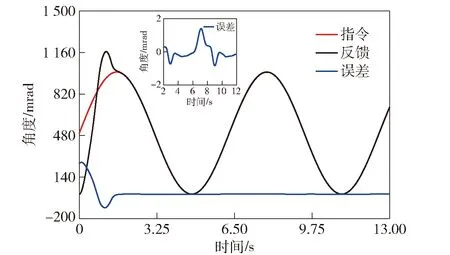
图12 高低向稳定跟踪曲线Fig.12 Pitch stability tracking curve

图13 正弦稳定跟踪下的n系角速度曲线Fig.13 Angular rate curves of n coordinate system under sinusoidal stable tracking
5.2 考虑传动弹性条件下的仿真
将系统的方位向和高低向传动机构再考虑齿轮啮合刚度及侧隙、传动轴扭转刚度后进行的仿真结果如下。
521 等效闭环控制下的稳定,及稳定跟踪
在考虑传动弹性条件下进行位置等效闭环、全闭环仿真。图14为根据给定动力传动结构参数条件下进行的等效闭环控制的稳定曲线。方位向稳定误差约05 mrad,高低约01 mrad,稳定精度与理想传动刚度条件下相当。图15可清楚地反映等效闭环稳定控制下的n系角速率,n系下火炮三轴角速度存在高频抖振噪声,趋势与图6一致。在实际应用过程中,可以采用低通滤波器滤除调。只要系统不引起谐振,等效闭环稳定控制是可以实现的。
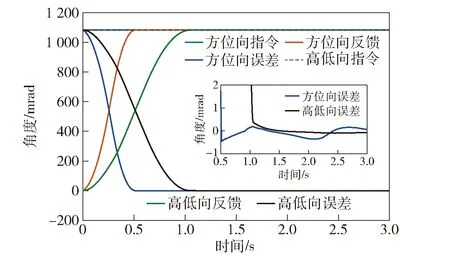
图14 等效闭环控制下的稳定曲线Fig.14 Stability curves under equivalent closed-loop control
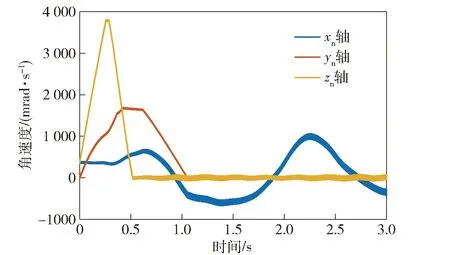
图15 等效闭环稳定控制下的n系角速度曲线Fig.15 Angular rate curves of n coordinate system under equivalet closed loop control
图16和图17中,高低向和方位向稳定跟踪误差最大值分别为26 mrad和18 mrad,比图11和图12中的效果略差,但都在可接受范围内。与图15一样,图18中的n系角速度曲线也存在因传动刚性引起的高频抖振。
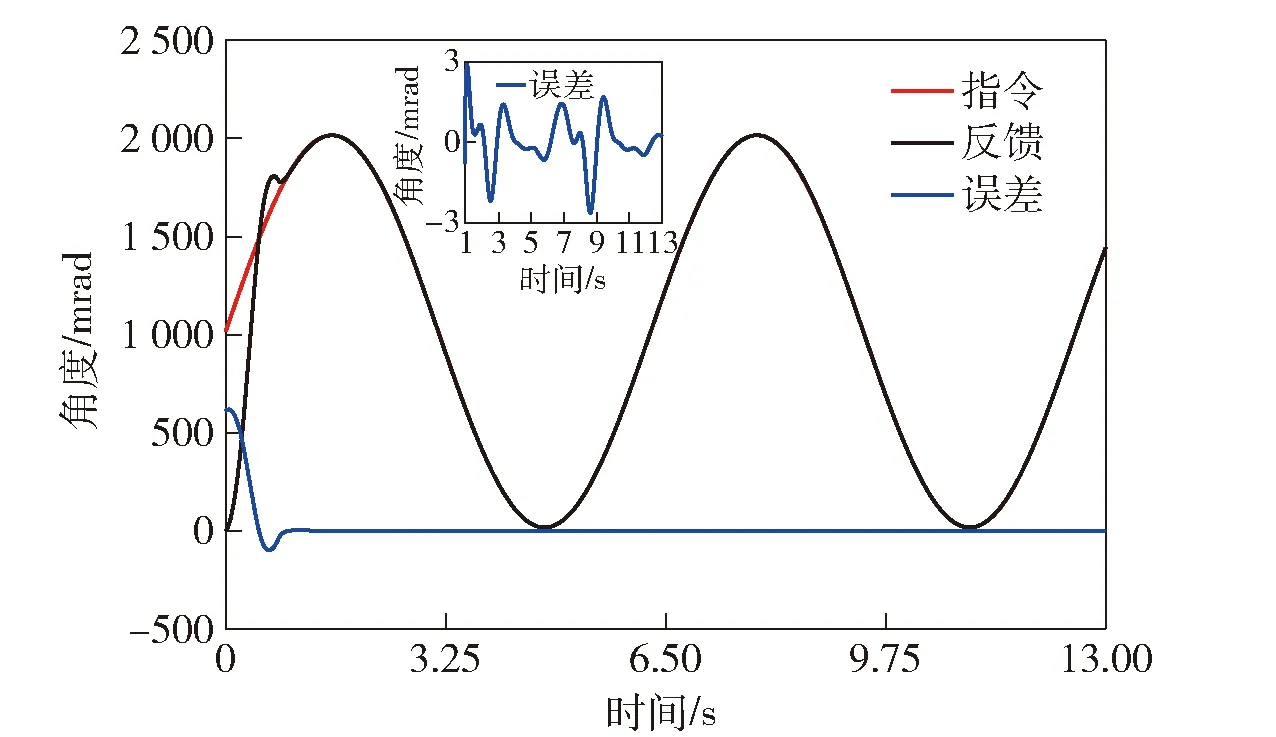
图16 等效闭环控制下的方位向稳定跟踪曲线Fig.16 Azimuth stability tracking curve under equivalent closed loop control
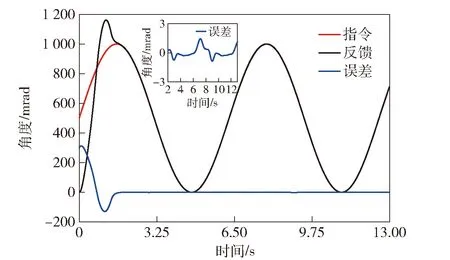
图17 等效闭环控制下的高低向稳定跟踪曲线Fig.17 Pitch stability tracking curve under equivalent closed loop control
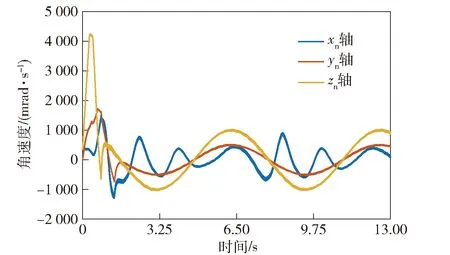
图18 等效闭环稳定跟踪控制下的n系角速率曲线Fig.18 Angular rate curves of n coordinate system under equivalent closed loop stable tracking control
522 全闭环控制下的稳定及稳定跟踪
图19为全闭环控制下的稳定曲线。全闭环控制下的方位向和高低向稳定跟踪曲线分别见图20和图21。从图20和图21中可以看到,采用全闭环干扰补偿式稳定下,在稳态阶段,高低向和方位向产生较为明显且周期约02 s的低频谐振,方位向稳定最大误差高达约11 mrad,高低稳定误差约6 mrad。由此可以看出,全闭环控制下的稳定及其跟踪,由于系统传动刚度的影响,控制系统难以稳定,根本谈不上火炮稳定跟踪。但在工程实践中,若出现不可避免的机械谐振,则可以采用陷波器、加速度反馈等措施来抑制。
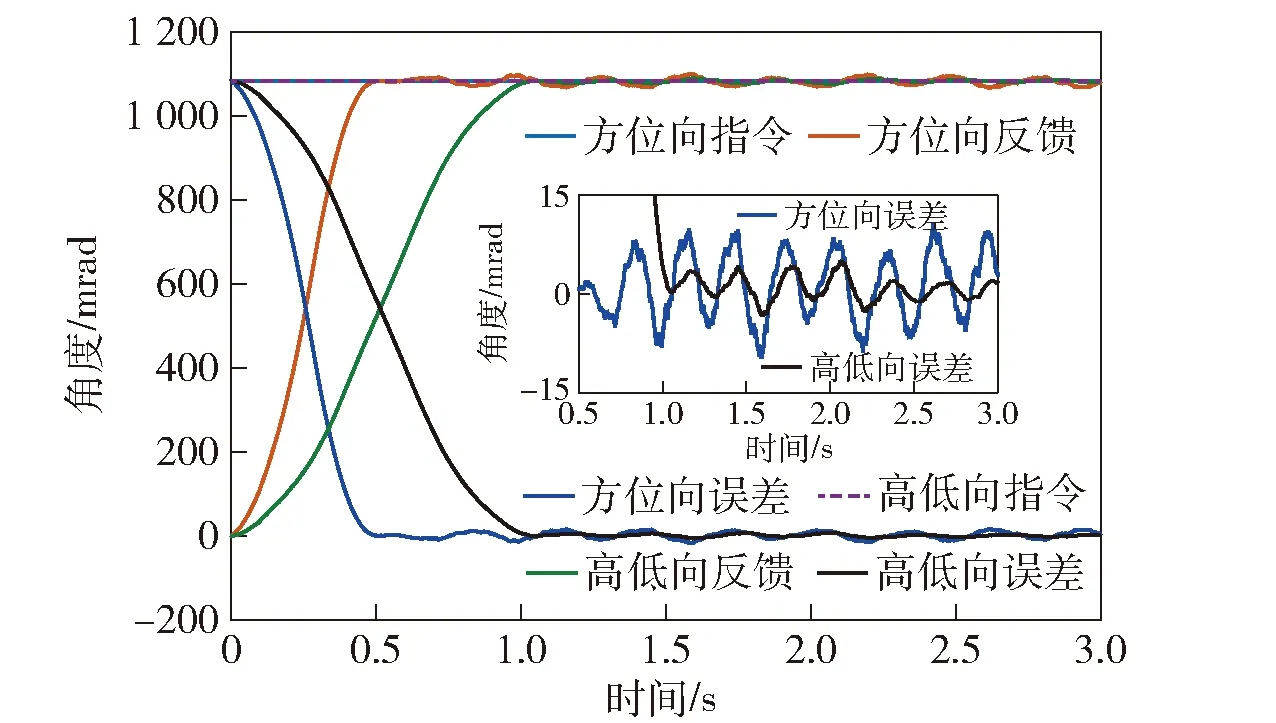
图19 全闭环控制下的稳定曲线Fig.19 Stability curves under full closed-loop control
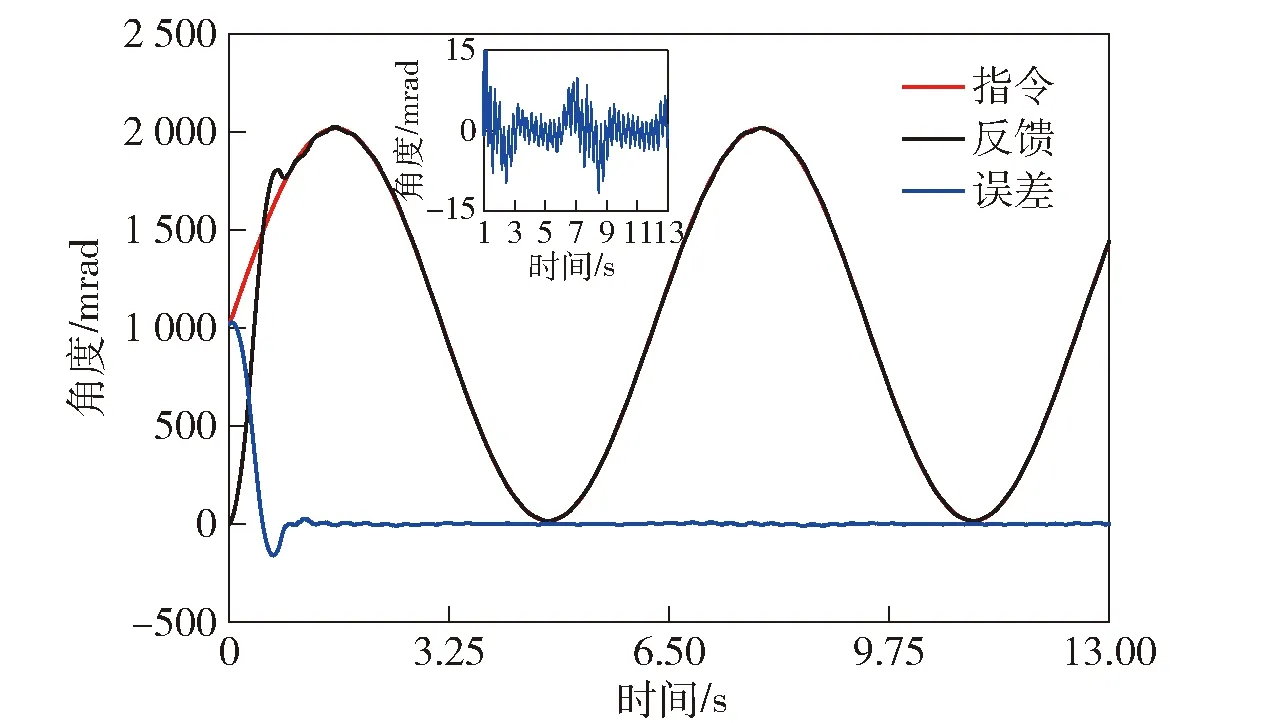
图20 全闭环控制下的方位向稳定跟踪曲线Fig.20 Azimuth stability tracking curve under full-closed loop control
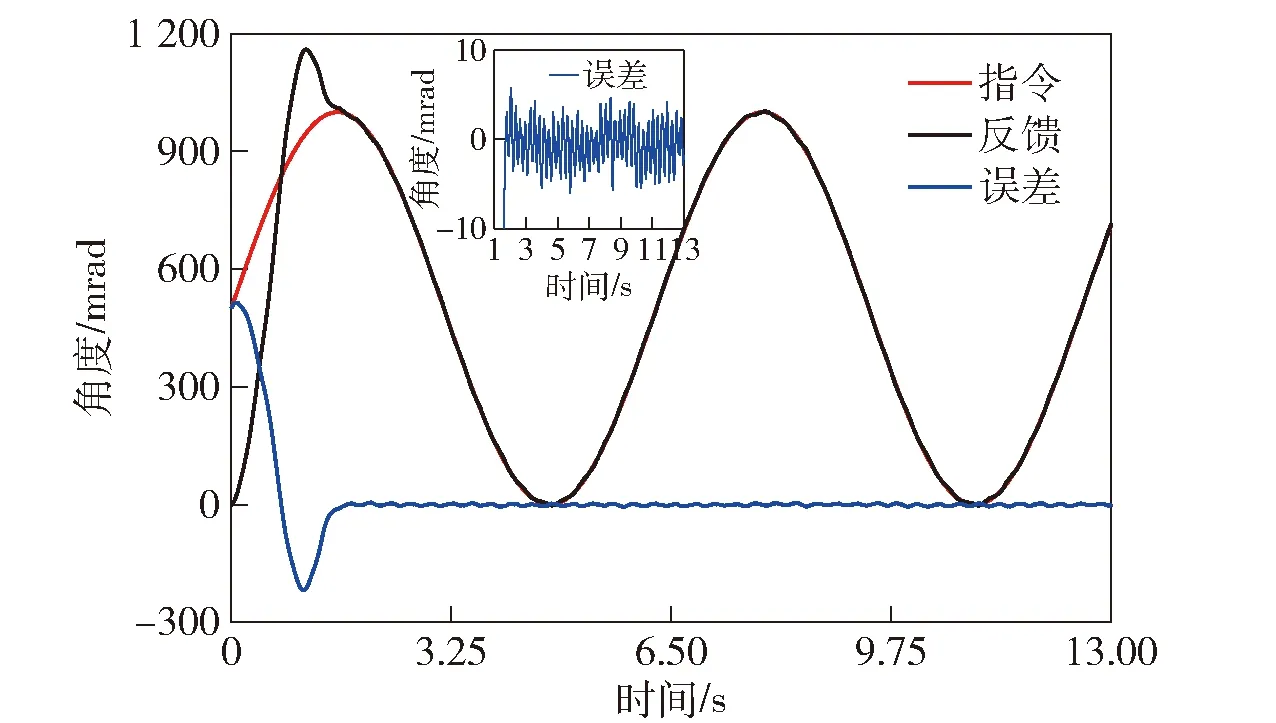
图21 全闭环控制下的高低向稳定跟踪曲线Fig.21 Pitch stability tracking curve under full-closed loop control
5.3 讨论
通过对基于g系的干扰速率补偿式稳定控制分别在不考虑和考虑传动弹性条件下的仿真结果,对其使用进行讨论:
1) 对只需要进行稳定瞄准应用的自行压制火炮,在调转速度和加速度相对不高的条件下,方案a和方案b并结合全闭环控制都能实现,但方案b由于可以实现解耦控制,瞄准过程中的过渡时间短,综合性能最好,但成本相对较高。由于是全闭环控制,捷联惯导安装在火炮摇架上,处于控制系统的“末端”,系统角度控制外环不可避免地包含了传动弹性、齿隙等非线性因素,在火炮动态稳定瞄准过程中,捷联惯导会敏感到调炮转动、车体转动、综合结构谐振等角速度,在小误差范围内会使稳定控制系统产生机械谐振,给控制系统设计带来不小的挑战,增加位置控制外环、速度控制内环控制器的设计难度。
2) 对需要进行稳定跟踪瞄准应用的自行高炮,具有较高的调炮速度和加速度,为保证跟踪控制系统稳定性,一直以来采用的是等效闭环控制。而方案a由于存在控制耦合,不利于稳定跟踪控制精度的提高。因此,对于具有稳定跟踪要求的高炮,方案b结合基于g系的等效闭环控制方式才是较稳妥的方案。由于此类应用条件下,作为航姿参考的惯导设备往往安装在车体上,处于控制系统的“前端”,只要系统不激励出谐振,安装在炮塔上的陀螺数据不会敏感出复杂频率的角速度,而造成测速“污染”。再加上自行高炮特有的等效闭环,将动力传动的传动弹性、齿隙等非线性因素排除在控制环外,使得系统具有图16和图17的精度。需要注意的是,高炮主要靠弹幕拦截,稳定跟踪控制精度不如点射的压制火炮那样高。
6 结论
本文针对行进间火炮指向稳定跟踪问题,提出基于g系的速度干扰补偿式稳定控制模型,采用牛顿- 欧拉法建立了系统控制模型,分别在不考虑弹性和考虑弹性传动两种情况下。进行等效闭环稳定控制、全闭环稳定控制下的稳定、稳定及跟踪仿真验证。得出如下主要结论:
1) 采用g系下的速率干扰补偿式稳定,在理想系统刚度条件下,其稳定精度与全闭环陀螺稳定精度相当,可实现方位和高低两个稳定系统的独立控制,相互之间不耦合。
2) 速率干扰补偿式稳定由于属于干扰速率开环前馈补偿,对传动刚度的要求不如陀螺闭环高,控制系统更容易稳定,配合位置等效闭环后对应用系统综合刚度的要求方面更宽泛,应用范围更广。
3) 传动性能包括系统结构综合刚度,对稳定系统及火炮瞄准精度具有至关重要的影响,结构设计需要给予充分的重视。若有条件,采用力矩电机直接驱动不失为一种很好的选择。
4) 采用牛顿- 欧拉法和传统控制方法所建立的系统动力学模型能够有效地反映车体、炮塔、火炮、传动机构和高低、方位执行机构之间的运动和动力学耦合关系,对该稳定控制模型的仿真验证起到重要作用,也可为后续研究更先进的控制方法打下基础,提供研究平台。
