极地船舶冰区操纵性能的六自由度离散元分析
2022-07-04于海龙
刘 昕, 于海龙
(1.中国人民解放军92942部队,北京 100161;2.中国船舶工业集团第708研究所,上海 200011)
1 引 言
极地船舶良好的操纵破冰性能是其执行科学考察、破冰引航、商业运输及救援任务的重要保障,可有效避免复杂冰情带来的船舶结构失效和航行冰困等工程安全问题[1]。针对冰区船舶操纵性能研究,国内外开展了大量冰区操纵性及冰阻力研究,主要包括实船操纵破冰试验[2]、室内冰水池模型试验[3-6]及数值模拟[1,5]等三方面内容。Riska等[2]开展了Viking II破冰船冰区回转试验,测定了不同冰况、航速及推进力下的回转直径,发现艉肩与海冰作用明显。采用定常回转及自航操纵模型试验得到定常回转破冰推进力及回转破冰力[3,4],为数值模拟及操纵破冰设计提供借鉴。文献[7,8]分别开展了3自由度定常与非定常冰区操纵回转模拟计算研究。
当前,船-冰作用的数值计算方法主要为有限元法[9]和离散元法[10,11]等。有限元法对船-冰碰撞、接触过程中的小变形及损伤等问题具有显著优势,可基于本构模型对船体结构和海冰的接触碰撞进行求解计算;离散元法可在宏观尺度模拟船-冰作用下海冰断裂破坏过程,可对离散状态下的碎冰运动及结构动冰载荷计算问题进行全面模拟[1]。破冰航行过程是一个三维非线性动力学问题,为此,考虑环境载荷影响下的6自由度非定常航行破冰过程具有重要意义。Tan等[12]模拟了Tor Viking II破冰船在6自由度下的破冰仿真计算,发现船体受垂向运动、水线处几何不对称及横摇倾斜角度等因素影响,船体破冰过程将产生额外横向力,可造成船体偏航。此外,6自由度下更多船体速度分量参与了破冰过程,使得破冰航速较高于3自由度。船舶破冰航行中的复杂不确定性多来自船体运动姿态、空间线载荷分布状况及海冰破坏模式[8,10]。为此,合理地构建船舶6自由度操纵运动模型将成为解决实际冰区船舶航行冰载荷及操纵破冰性能研究的重要手段。
目前,基于离散元数值方法开展了大量船-冰相互作用模拟计算,但基于离散元方法的6自由度冰区船舶操纵模拟研究相对较少。Quinton[13]最早基于DECICE离散元软件对Terry Fox破冰船的模型试验开展了船体回转破冰模拟,得到与基于平面运动机构PMM(Planar Motion Mechanism)[3]回转试验一致的破冰力矩结果;狄少丞等[1]基于球体离散单元开展了六自由度下船舶操纵破冰模拟,模拟得到不同冰厚及海冰密集度影响下的操纵冰载荷及回转直径,但受计算能力及实船操纵结果影响,缺乏完整平整冰区操纵航行轨迹、敞水域操纵对比验证及6自由度运动响应分析。
船-冰作用过程中,船体空间线载荷分布状况成为船舶操纵所需最小操纵破冰力的重要依据[6,14]。破冰船操纵破冰需满足在特定冰厚下获得稳定破冰力,实现冰区操纵回转。这就需要对海冰与船舶结构作用时的破冰模式进行分析,从而合理确定冰载荷分布特性及冰区操纵性能。
本文建立了船舶6自由度操纵运动模型,基于扩展多面体海冰单元模型开展冰厚及舵角影响下极地船舶操纵性能及冰载荷的计算分析,进而为极地船舶抗冰设计及操纵性能预报提供重要参考。
2 冰-船舶相互作用的离散元方法
2.1 平整冰的扩展多面体离散元方法
采用二维Voronoi切割将二维计算域划分为任意多边形,可在垂直平面方向设定高度获得三维多面体,并将球体与三维多面体经闵可夫斯基和构造具有一定扩展半径的任意扩展多面体海冰形态[15],如图1所示。闵可夫斯基和定义为

图1 扩展多面体海冰单元
A⊕B={x+y|x∈A,y∈B}
(1)
式中x和y为空间几何体所代表的点集A和B,A⊕B为两几何体内几何点的空间矢量和。
采用近似包络函数的接触搜索算法开展扩展多面体单元间接触重叠量及接触力计算。同时,采用粘弹性接触力模型计算接触力,即考虑到弹性变形引起的弹性恢复力外,还对单元碰撞产生的能量损耗进行计算。由此,单元接触力同时考虑弹性力及粘滞力,其法向与切向接触力表示为[10]
(2)

(3)
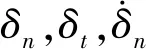
考虑真实海冰自然条件下的冻结状态,本文在单元间设定粘结点与相邻共面单元相互粘结,表征海冰冻结状态,粘结力模型如图2所示。考虑海冰漂浮过程的能量损耗,可采用法向阻力系数Cn与切向阻力系数Cs表示其粘滞过程。详细粘结计算过程可参见文献[10]。
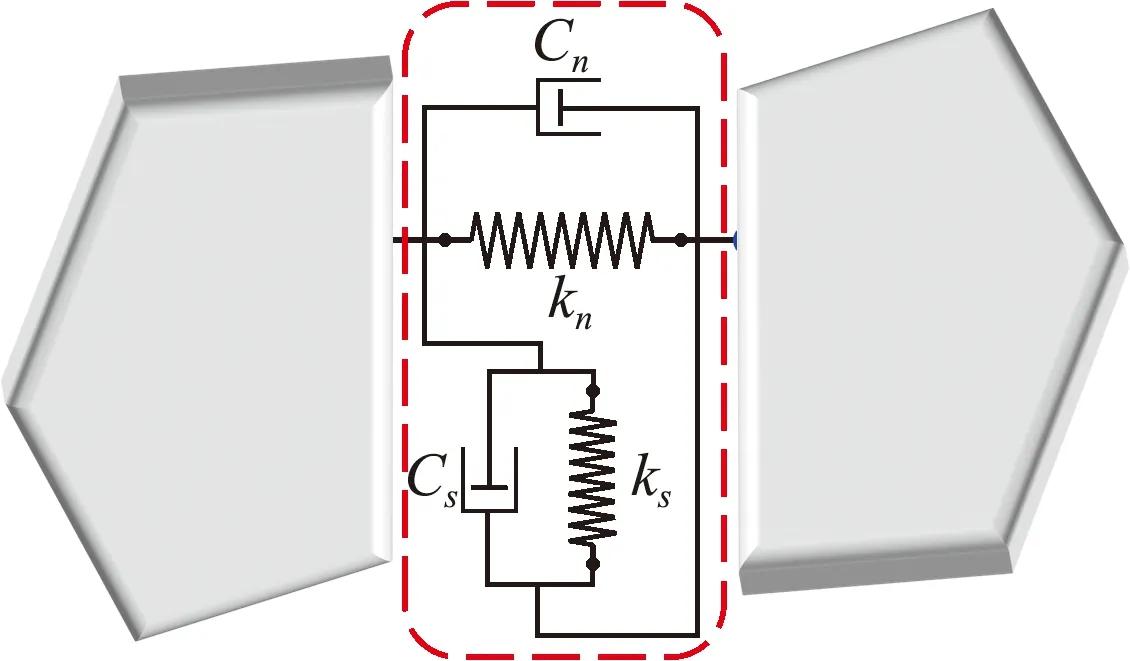
图2 海冰单元间的粘结力模型
考虑船冰相互作用下的海冰断裂破碎,采用混合断裂能模型判定海冰单元粘结状态,并考虑法向拉伸与剪切计算临界强度,在粘结力超出临界应力强度后考虑刚度软化过程,当粘结变形超过临界变形时,单元间粘结失效,即海冰发生断裂破碎[10]。
2.2 船舶操纵航行的六自由度计算
将船体冰载荷、螺旋桨推力、舵力及水动力等载荷分开考虑,开展船舶操纵破冰的离散元模拟。首先将船体结构表面划分为若干三角形单元,开展海冰单元与船体结构间的接触搜索、接触力计算和海流对船体的作用力计算[15]。受水动力及其他外载荷影响,船体发生沿整体坐标系的平动及随船坐标系下的转动,实现6自由度姿态航行,如图3所示。
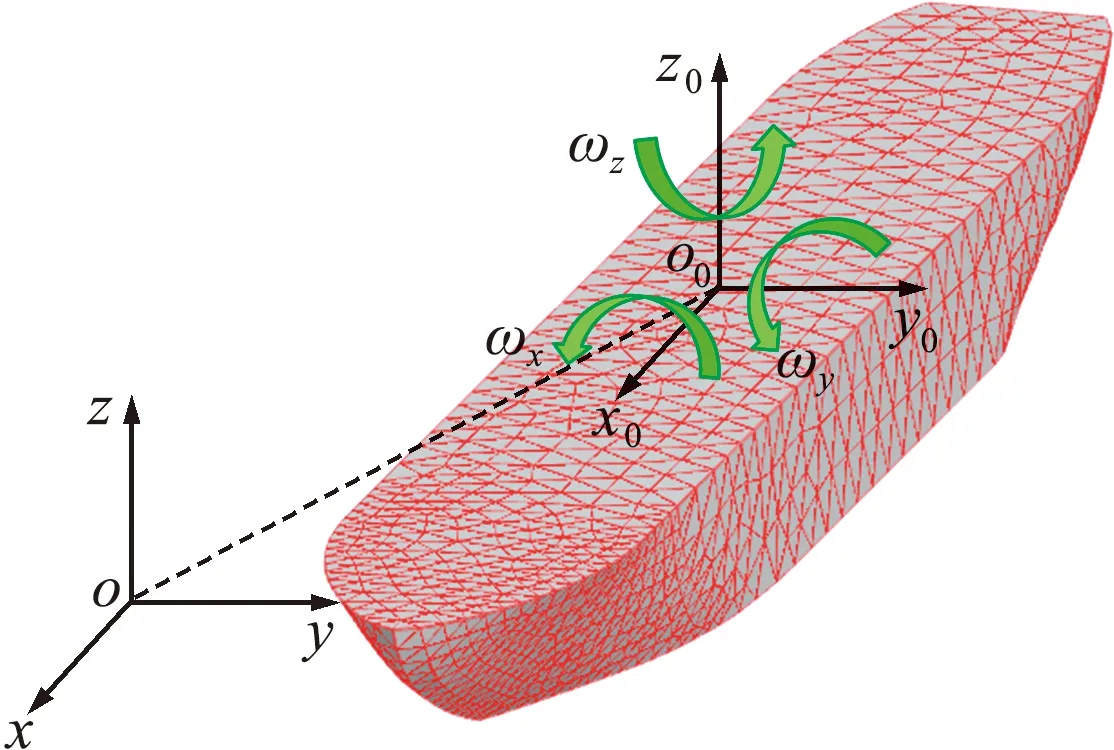
图3 极地船舶操纵航行坐标系
船舶操纵航行动力学方程为
(7)
(8)
式中m和G分别为船舶质量及重力,u,I和ω分别为位移矢量、转动惯量和转速,下标i,p,r,b和d分别为冰力、螺旋桨力、舵力、浮力和拖曳力及其力矩。
基于离散化思想考虑海水浮力和海流拖曳力及其力矩对船体六自由度系统的影响。浮力计算基于阿基米德原理,浮力矩是由浮心与重心的不平衡导致的,可导致海冰翻转。其浮心即浸没水下部分体积的形心,浮力与浮力矩可表示为

(9,10)

船体浸没体积计算流程如下,首先基于DEM思想将船体表面划分为三角形,再取船体重心竖直方向上与水平面交点Op,最后以水线以下三角形为底面,Op为顶点构成等效四面体,累加四面体体积即为浸没体积。如图4所示,其四面体质心xi与单元浸没体积Vi可分别求出,即
图4 面AB C完全浸没水中
(11)
(12)
式中h为点Op到面ABC的垂直距离。本文AB·BC应当满足右手螺旋定则。那么最终没入水中的体积Vsub及其形心xb为
Vsub=∑Vi,xb=∑xiVi、Vsub
(13,14)
式中 形心xb即是浮心坐标。由此可计算浮力Fb和浮力矩Mb。
若面ABC跨过水线,那么计算交点E和F。采用E和F替代水上角点,并计算水下点与E和F两点构成的四面体质心与体积,如图5所示。
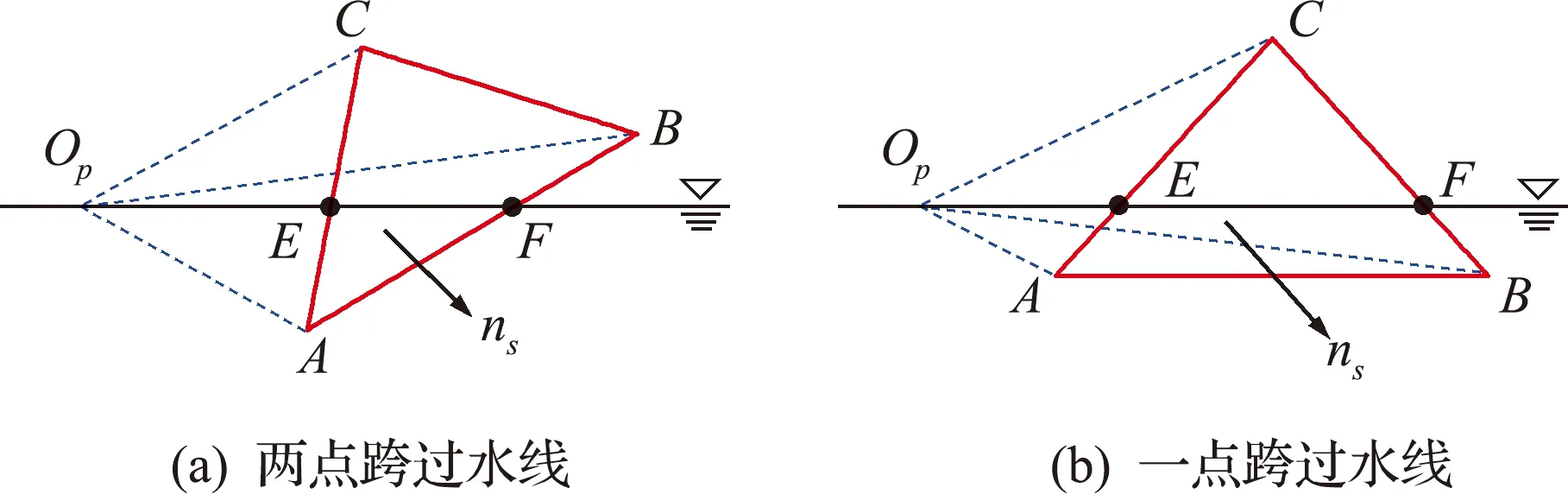
图5 面ABC跨过水线
海流作用下船体受拖曳力及拖曳力矩作用,其中船体拖曳力可通过三角形单元划分求和计算为[15]
(15)

2.3 船舶操纵运动模型及数值验证
船舶螺旋桨推进力在随船坐标系下可表示为[16]

(16)
式中tp为螺旋桨推力减额系数,n为螺旋桨转速,D为螺旋桨直径,KT为螺旋桨敞水推力系数,该参数可由螺距比获取[17]。
船舶操纵航行的舵力及力矩可表示为[8]
(17)

为验证该操纵航行模拟结果的可靠性,本文开展与雪龙号破冰船在35°舵角下的敞水回转试航工况一致的操纵模拟计算。已知实船试航稳定回转航速为5.08 m/s,回转直径为488 m。主要计算参数列入表1。
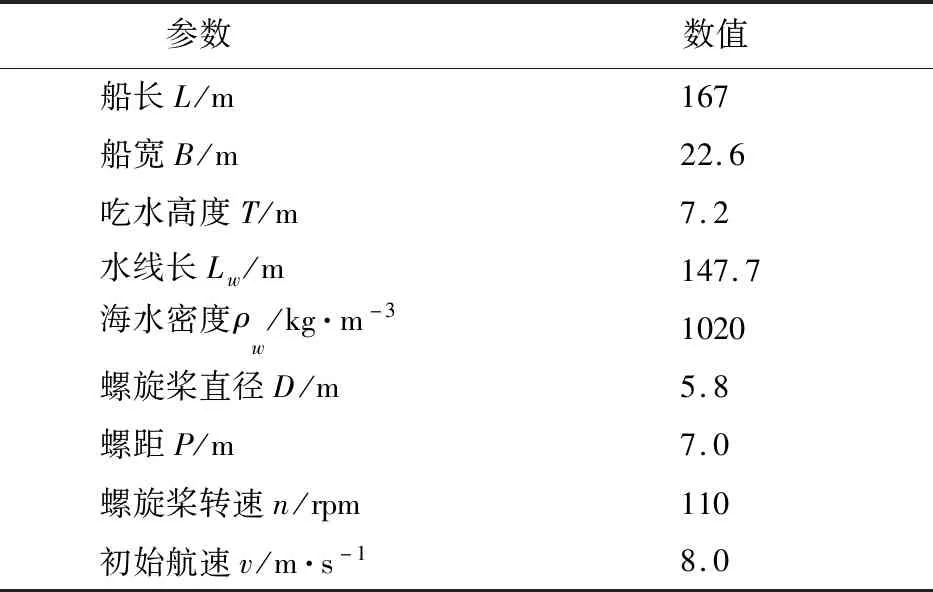
表1 船体结构尺度及主要计算参数
船体于敞水区先直航后右舵35°回转,受船体侧向水阻力增大影响,船体缓慢转向并减速,待其稳定后做定常回转运动。确定稳定航速与回转轨迹如图6所示。计算得到稳定回转航速为5.3 m/s,回转直径为501 m。与试航稳定回转航速及回转直径结果相对误差分别为4.3%和2.6%。由此验证该六自由度船舶操纵模型的适用性。
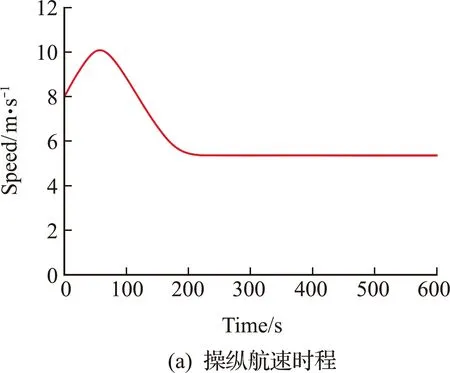
图6 敞水操纵回转模拟结果
3 冰区船舶操纵性的离散元计算
破冰船操纵航行中的冰载荷是影响操纵性能及航行安全的重要参数。本文采用离散元方法对冰区船舶的操纵性能及航行冰载荷展开计算分析。
3.1 航行冰阻力计算及验证
采用离散元方法模拟冰区船舶直航破冰过程的主要计算参数列入表2。图7给出了雪龙号科学考察船直航破冰的离散元模拟结果。
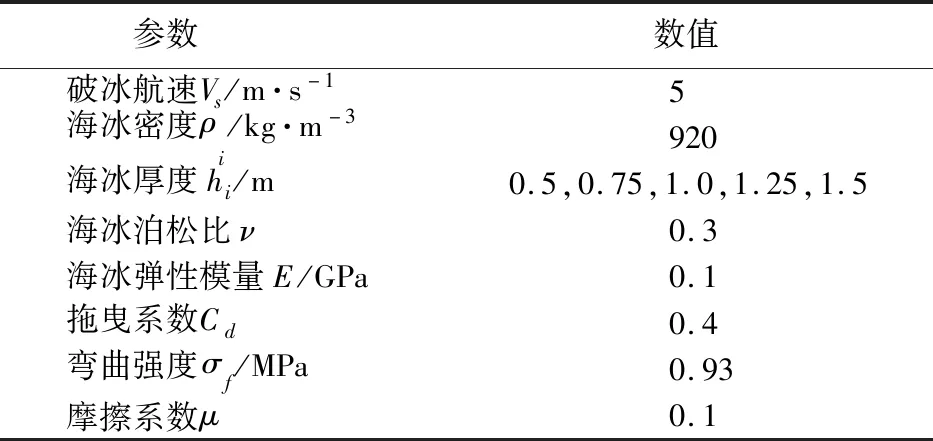
表2 冰区直航模拟的主要计算参数
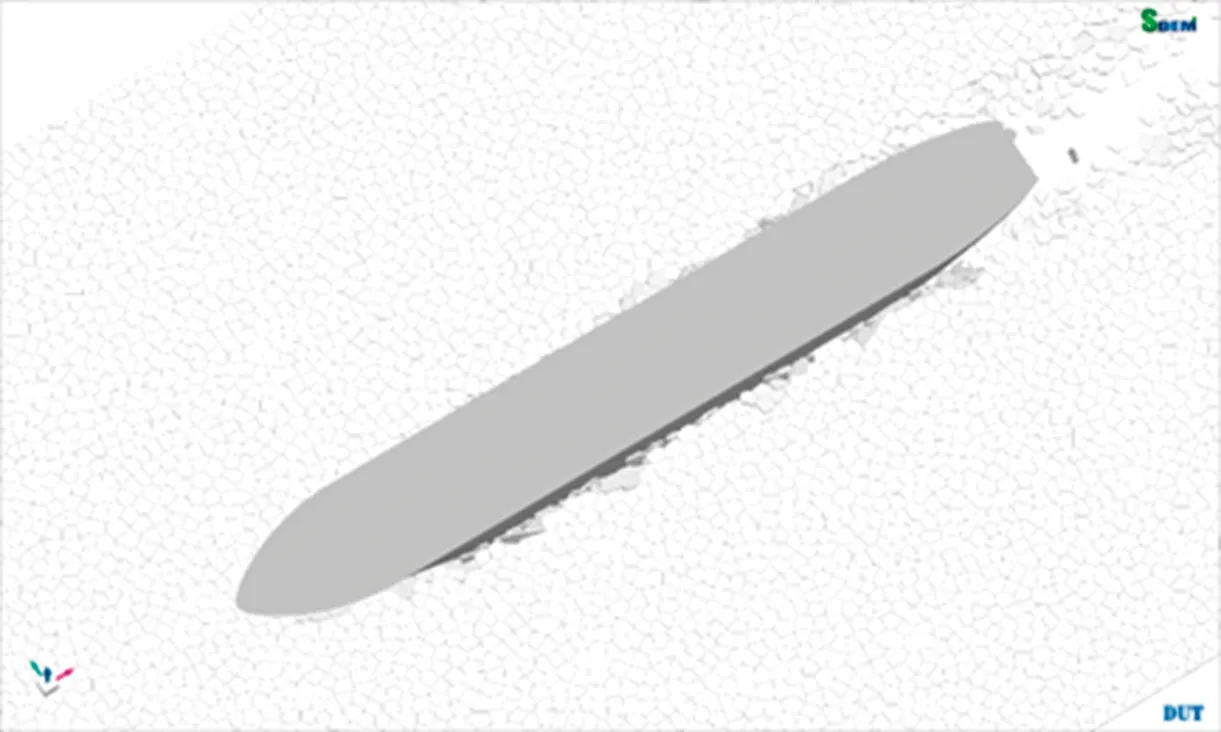
图7 破冰船操纵直航破冰模拟结果
可以看出,海冰在较小艏柱倾角船艏结构部位发生弯曲破坏,产生较大峰值冰载荷,且碎冰在船肩挤压作用下发生堆积、旋转及清除过程。此外,部分碎冰受迫下潜,与船舯及船体底部发生摩擦作用,产生持续稳定冰载荷,后经船艉扩散开来,最终生成与船宽近似尺寸的开阔航道。
图8给出了冰厚0.5 m,航速5 m/s,DEM计算直航冰载荷及船体线载荷结果。图8(a)中冰载荷峰值表征海冰发生弯曲破碎,且弯曲破坏后载荷瞬间回落,待船体完全驶入冰区,其船冰作用过程趋于动态平衡,载荷时程趋于稳定。图8(b)表明直航破冰时冰载荷作用位置主要分布于船艏及船肩。
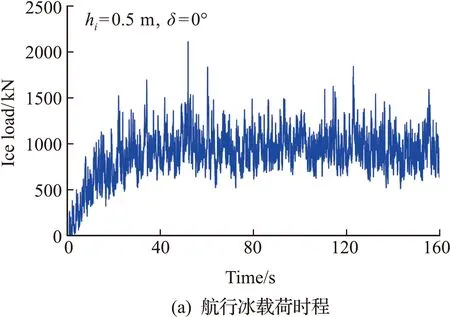
图8 直航冰载荷
为验证DEM计算结果的准确性,采用 Lind-qvist 船舶冰阻力经验公式对比不同冰厚下的船舶航行冰阻力。船体航行冰阻力Ri可表示为[19]
(18)
式中Rc,Rb和Rs分别为船艏挤压破坏阻力、弯曲破坏阻力和浸没阻力,v为船冰相对速度,hi为海冰厚度,g为重力加速度,Lw为水线船长。
图9给出了DEM与Lindqvist公式计算对比情况,两者冰力接近且变化趋势一致,但DEM模拟结果略小于经验公式。这是由于Lindqvist公式的船艏挤压破坏阻力、弯曲破坏冰力及碎冰浸没阻力均采用理想化的模型,未考虑其弯曲破坏后载荷回落动态过程,导致该公式冰力计算结果较为保守。
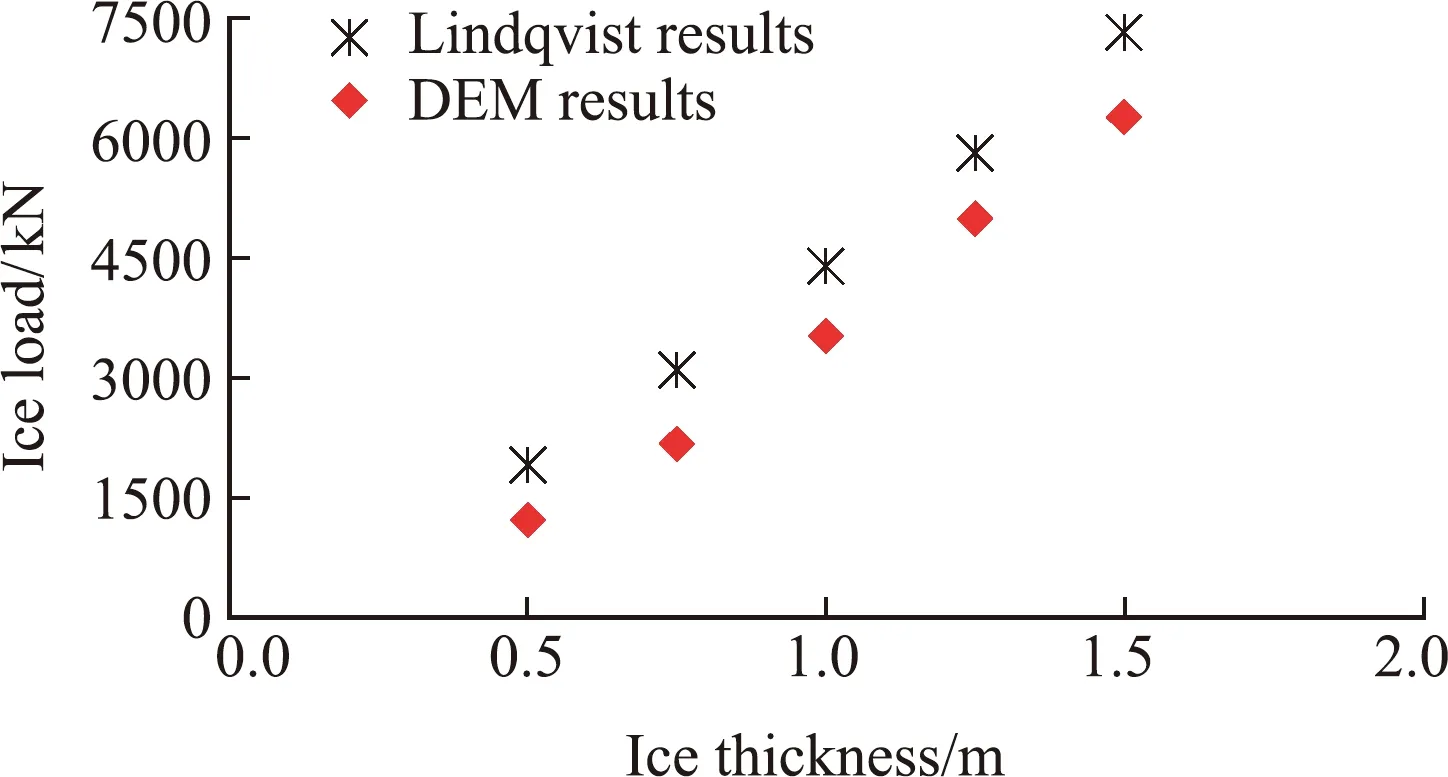
图9 DEM与Lindqvist经验公式的船体冰阻力对比
3.2 操纵破冰航行的离散元模拟
采用扩展多面体离散元法对极地船舶操纵破冰过程进行数值计算,可确定船舶运动轨迹及结构冰载荷。表3列出了冰厚0.3 m,舵角35°条件下的冰区操纵破冰模拟参数。操纵破冰模拟过程中,初始为稳定直航破冰,待其完全驶入冰区后开启右舵35°操纵回转。
表3 船舶操纵破冰的主要计算模拟参数
图10给出了平整冰区操纵回转模拟过程,分别为回转内侧、外侧、船艏及船艉方向破冰模拟结果。可以看出,艉肩部位发生明显破冰现象,船尾开阔航道两侧遍布剥落碎冰,并与实船操纵试航[2]及模型操纵试验[20]结果一致。基于稳定操纵航速与回转角速度之比,继而求得回转半径为293 m。
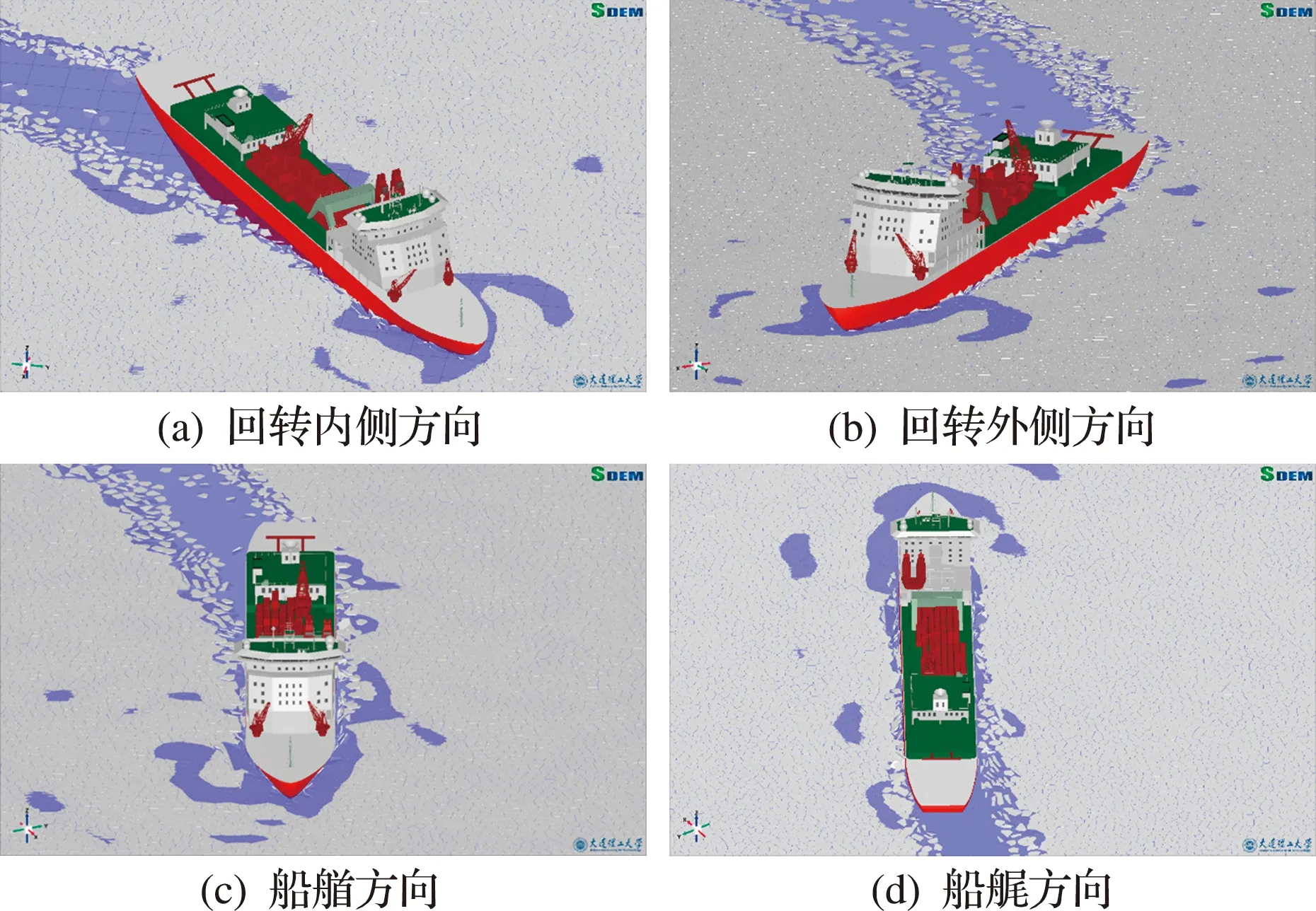
图10 雪龙号科学考察船操纵破冰的离散元模拟
图11给出了冰厚0.3 m,操纵回转破冰航行中船体线载荷分布情况。可以看出,此时海冰主要作用位置不再是直航连续破冰状态下的船艏和船肩部位,而是回转圆外侧船舷及艉肩[4]。此时,艉肩承载了回转圆外侧的海冰作用,并受船艉较大垂直角度影响,海冰将难以发生同艏肩部位作用下的弯曲破坏,进而增加了作用冰力。
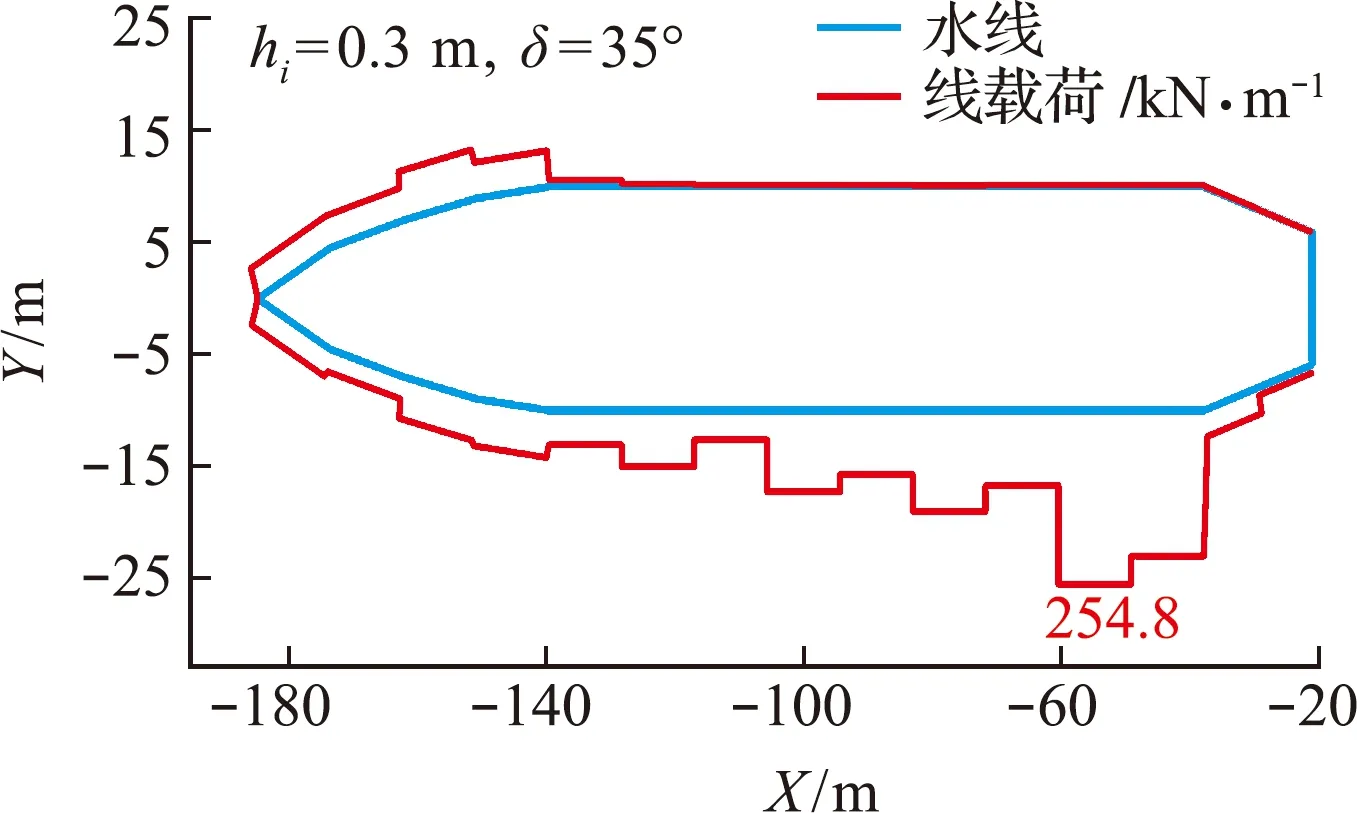
图11 操纵回转破冰过程中的船体线载荷分布状况
图12给出了操纵破冰过程中的垂荡、横摇角及纵摇角时程。发现冰厚0.3 m船体操纵破冰稳定垂荡高度为0.02 m,船体横摇角稳定在0°,但振幅高达0.8°。这一过程将加剧船舷与海冰挤压作用,有利于拓宽航道;对于纵摇角时程曲线,发现前50 s船体直航破冰过程中,纵摇角稳定在0.07°附近振荡;后期船体满舵35°操纵回转破冰,纵摇角将逐渐上升,最终趋于0.28°。由此发现,6自由度操纵破冰航行将导致船体纵摇角增大,船艏抬升高度较直航破冰过程明显。该运动姿态将有利于船体重力速度分量参与破冰过程,提高破冰效率。
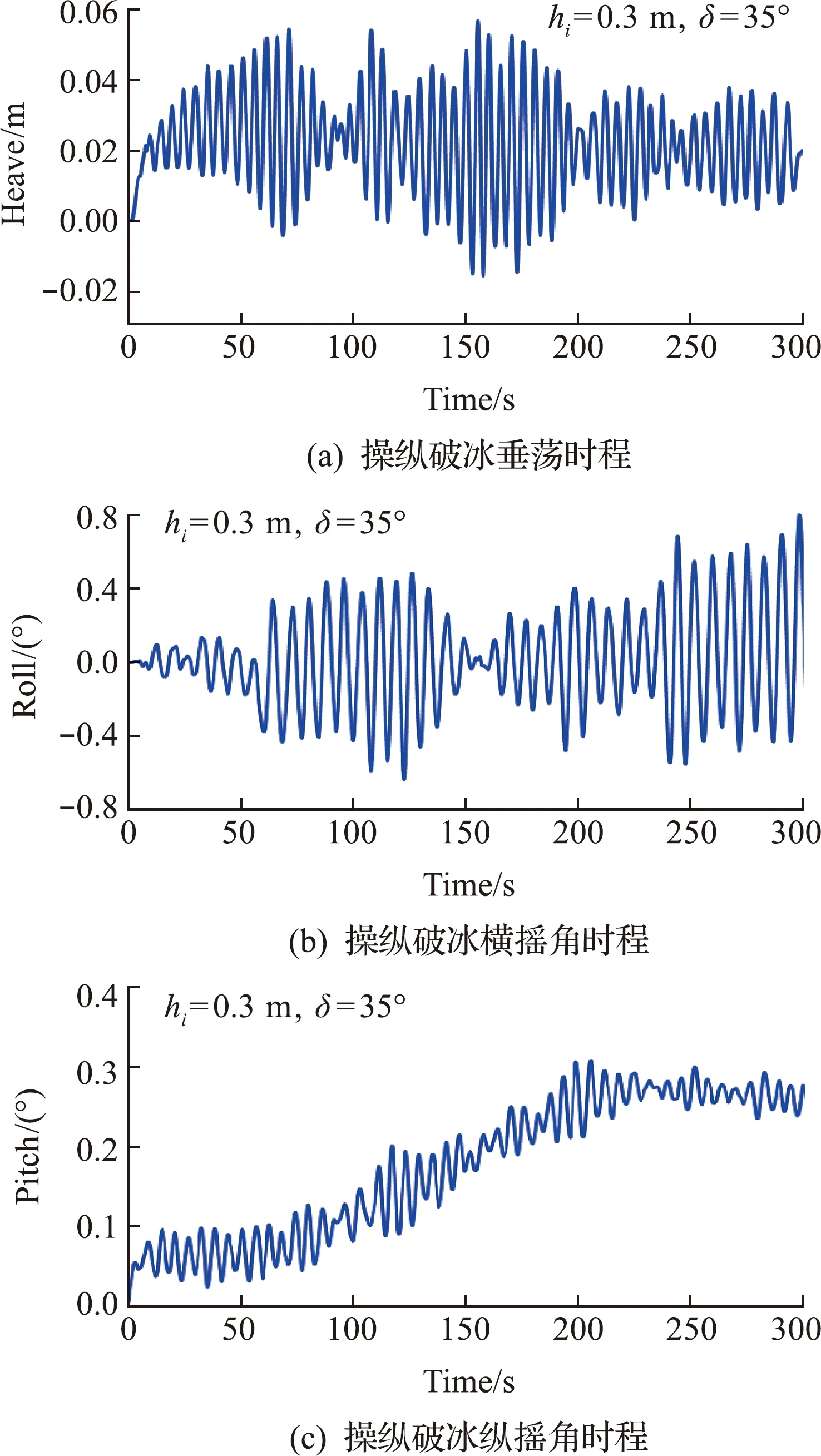
图12 冰区船舶操纵回转运动响应时程
4 极地船舶操纵性能的主要影响因素分析
4.1 冰厚对操纵性能的影响
图13给出了舵角45°,冰厚分别为hi=0.3 m,0.4 m,0.45 m,0.5 m,0.6 m下的操纵破冰轨迹。可以发现,薄冰条件下船体操纵响应明显,受操纵力矩影响,船艏、船舷及回转圆外侧艉肩部位均参与破冰;伴随冰厚增加,船体回转响应逐渐降低,艉肩将不再参与破冰,船艏及船舷成为主要破冰部位,且操纵破冰回转所需最小空间增大。这是由于冰厚的增大将导致破冰载荷增加,使得船舵操纵破冰力(力矩)难以满足破冰载荷,船体将难以实现快速操纵破冰航行。此外,基于稳定操纵航速与回转角速度之比得到冰厚hi=0.3 m~0.6 m下的回转半径分别为R=283 m,462 m,615 m,914 m,1732 m。由此可见,冰厚的增大将严重制约破冰船回转性能。在较大冰厚下,极地船舶将不再具备很好的回转破冰能力,此时,该冰厚可称为极限操纵冰厚。
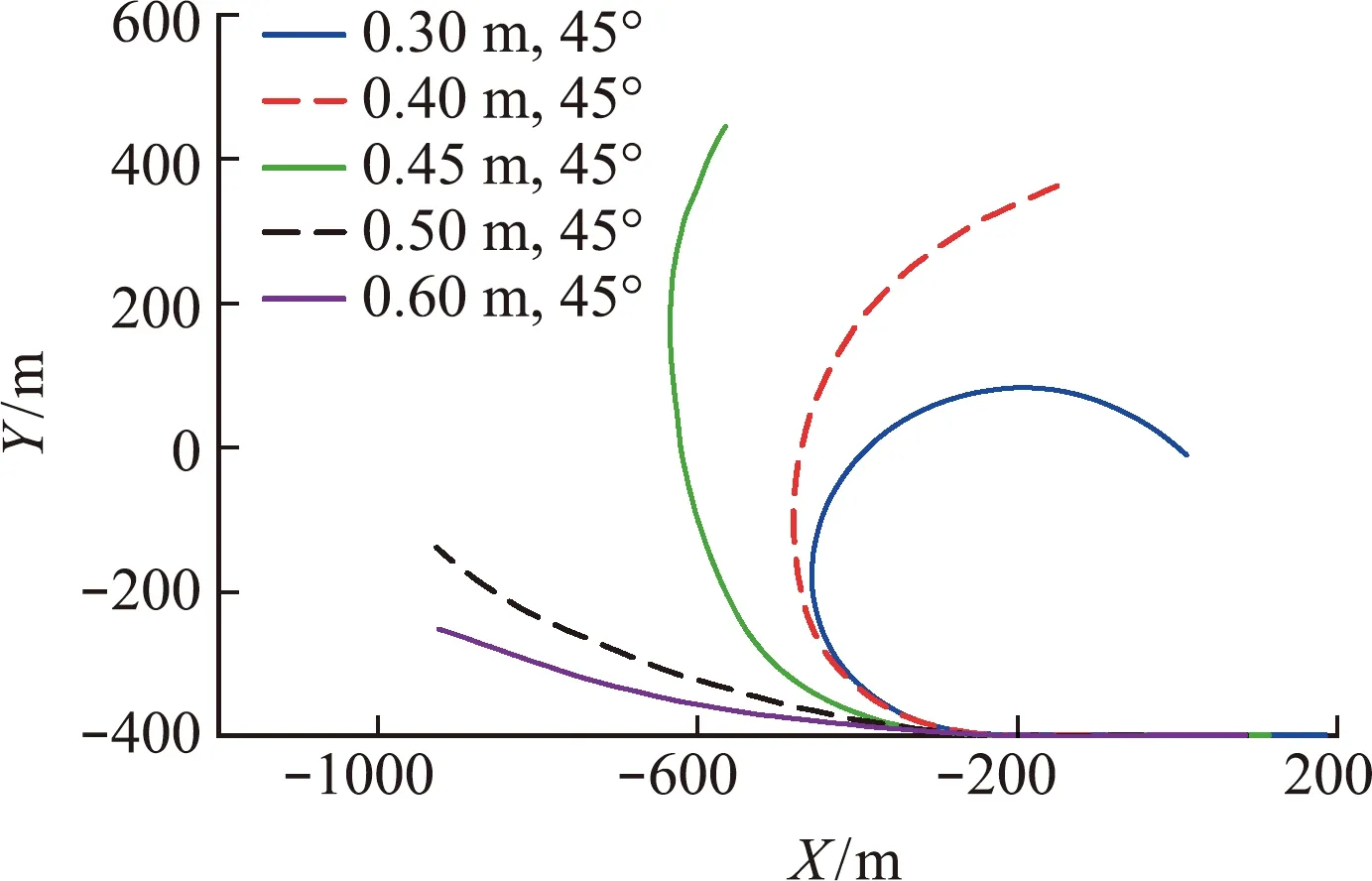
图13 操纵回转破冰轨迹
4.2 舵角对操纵性能的影响
图14给出了舵角及冰厚影响下的操纵回转破冰轨迹结果。冰厚0.3 m条件下,当舵角分别为δ=35°,40°,45°时,其回转半径分别为382 m,297 m和283 m。可知冰区船舶操纵半径随操纵舵角的增加而减小,且相较于冰厚对操纵回转响应的影响,在35°~45°区间内操纵舵角对其影响并不显著。这是因为0.3 m薄冰对船体冰载荷影响总体偏小,船体在35°较小舵角时便可获得操纵破冰所需力(力矩),因此操纵回转响应差别不大。观察0.45 m较厚冰区不同舵角下的破冰轨迹结果,发现船体在承载较大冰载荷条件下,大舵角将显著提升极地船舶冰区操纵性能,实现快速回转破冰。
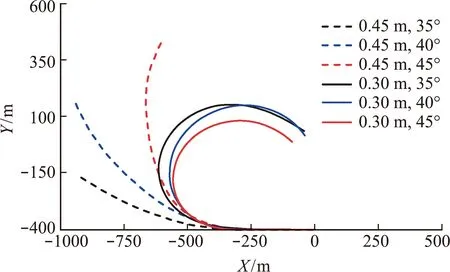
图14 舵角及冰厚影响下的操纵回转破冰轨迹
4.3 冰厚和舵角对冰区操纵性能的共同影响
图15给出了不同工况下的操纵回转半径统计结果,发现冰厚对操纵回转半径影响较舵角显著,且冰厚越大,舵角对船体操纵性能的影响越显著。
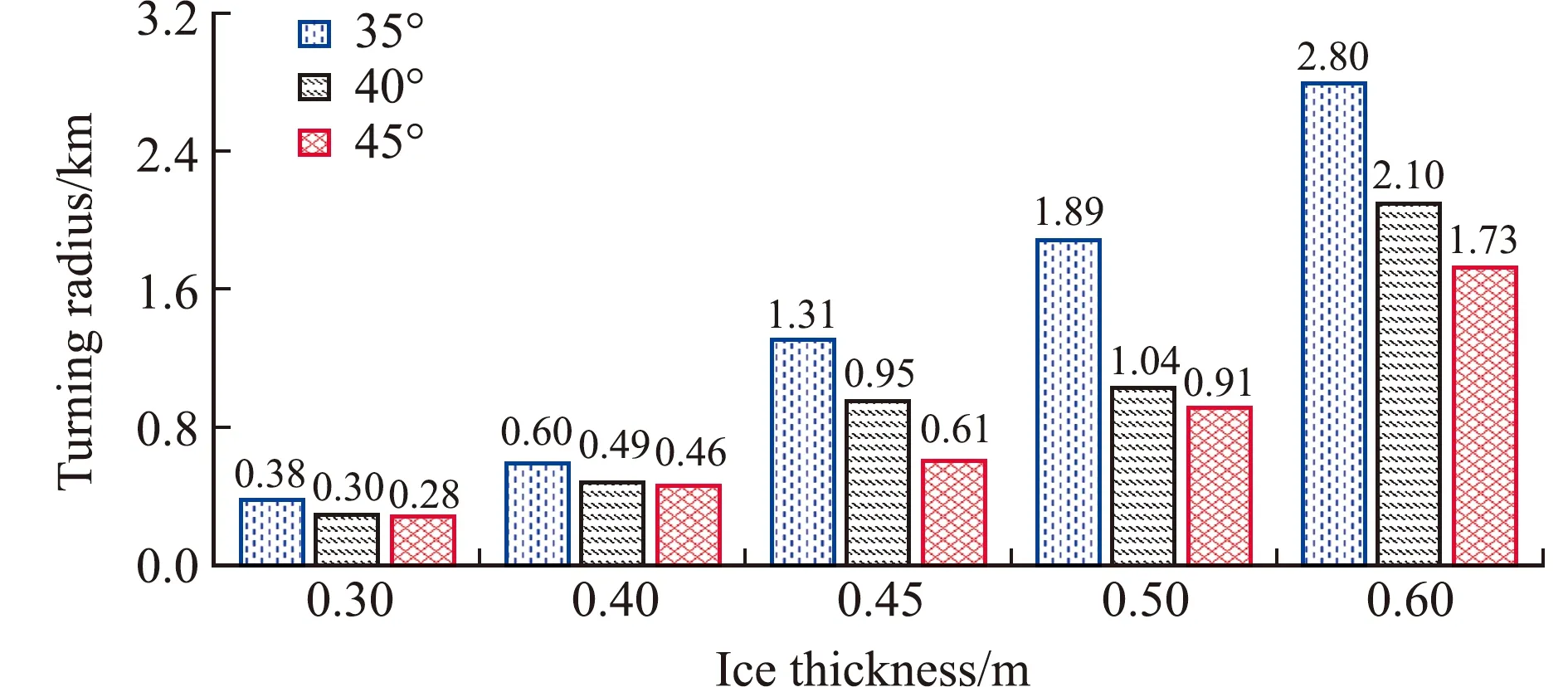
图15 离散元模拟的不同舵角及冰厚下冰区操纵的回转半径
为进一步探究冰厚及舵角对操纵性能的影响,图16给出了不同冰厚及舵角下的船体操纵航速。发现回转航速随冰厚增加呈先增大后减小趋势,且均随舵角的增加而降低。值得注意的是,0.3 m薄冰航速与0.6 m厚冰结果较为接近。这是由于 0.3 m 薄冰条件下船体操纵性能较好,其船舷及艉肩破冰明显,产生较宽破冰航道,且增加了侧向水阻力,对船舶运动状态产生影响[4]。由此可知,操纵破冰航速是由冰厚及其运动姿态共同决定的。
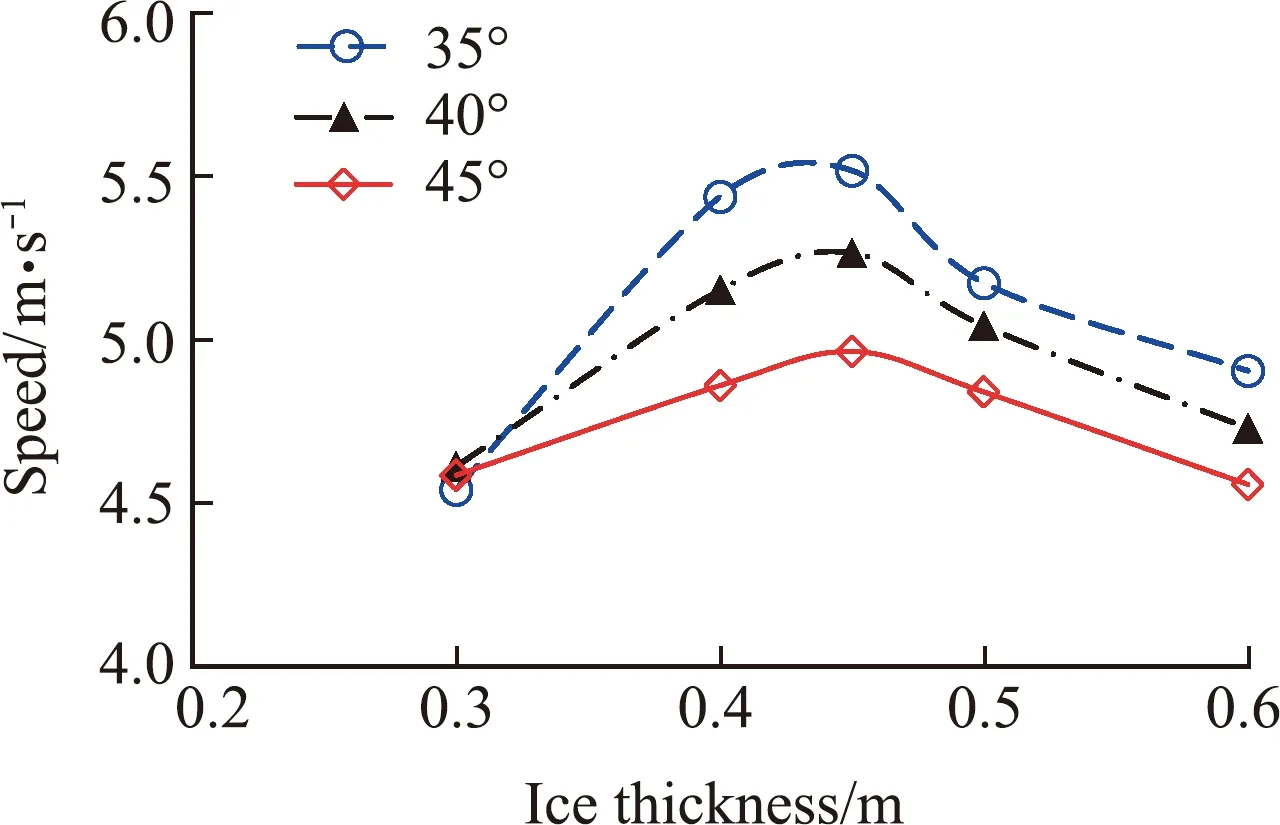
图16 离散元模拟的不同舵角下操纵破冰航速
通常,操纵回转半径与水线长之比(R/Lw)视为衡量船舶操纵性能的标准之一,其比值越低,表征该船舶回转性能越好。这里对平整冰区雪龙号R/Lw展开分析,如图17所示。发现雪龙号回转半径与水线长之比介于2~20之间,其操纵性能随冰厚的增加而降低,随舵角的增大而增强,且在较厚冰况下,舵角对其操纵性能影响更为显著。
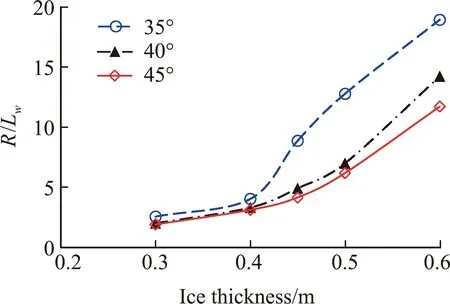
图17 离散元模拟的极地船舶回转半径与水线长之比
5 结 论
本文采用扩展多面体DEM法建立了极地船舶操纵回转破冰的6自由度计算模型,开展了雪龙号敞水回转的数值验证;采用DEM法计算雪龙号直航破冰阻力并通过经验公式进行验证;开展了不同冰厚及舵角下的操纵航行冰载荷及回转破冰航行模拟。结果表明,在操纵破冰过程中,回转圆外侧船舷及艉肩位置冰载荷将显著提高;海冰厚度及舵角对破冰船操纵性能具有显著影响,其冰厚的提高将严重制约船舶操纵性能,且随舵角的增大其操纵性能将有所改善。薄冰条件下,艉肩破冰显著,破冰航道变宽,其操纵破冰阻力将随冰厚的增大呈现降低趋势;厚冰条件下,操纵破冰将随冰厚的增大而增加。本文建立的基于离散元法的船舶操纵模型可有效模拟极地船舶操纵破冰航行过程,并对极地环境下破冰船直航及操纵过程中的船体冰载荷及操纵性能进行可靠的预报与分析。
