一种新型水下自主航行器无线充电系统耦合器
2022-07-04张梓越
张梓越
一种新型水下自主航行器无线充电系统耦合器
张梓越
(北京工业大学信息学部,北京 100124)
耦合器是水下自主航行器无线充电系统的关键部件之一,耦合系数和互感是耦合器的核心指标,提高耦合系数和互感的大小及稳定性,以增强耦合器传能水平和抗偏移性能是耦合器设计的关键。本文在分析ε形和环形磁耦合装置基础上,提出了一种优化后的无线充电系统耦合器结构。该型耦合器发射侧采用双D发射线圈,接收侧采用疏松线圈绕制的Π型磁芯,与现有结构相比,该结构通过减小气隙、增大导磁面积,提高了耦合能力,仿真结果表明,在轴向偏移±30 mm下耦合系数变化量约为0.13,在角度偏移±10°度下耦合系数变化量约为0.1,证明该型耦合器具有较高的抗偏移性能。
耦合器 耦合系数 抗偏移性能 疏松绕制
0 引言
作为发展中的海洋大国,丰富的海洋矿产和生物资源能有效缓解社会发展面临的能源匮乏和资源短缺。水下自主航行器(Autonomous Underwater Vehicle,AUV)作为探索海洋的重要装备,在民用和军事领域都有着广泛的应用。
目前在国际AUV技术研究方面,比较有影响力且相对成熟的有:挪威 Kongsberg 公司生产的REMUS 6000[1]、美国Hydroid公司研制的Bluefin21[2]、英国南安普顿国家海洋中心 (NOC) 研制的Autosub 6000[3]等。国内相关技术的研究从20世纪90年代初开始深海AUV的研制工作。90年代中期,中国科学院沈阳自动化研究所联合国内相关单位成功研制我国第1台1000米级“探索者”AUV[4],对后续新型AUV技术的开发具有重要意义。
AUV最主要的特点是摆脱了系缆的牵绊,在水下作战和作业方面更加灵活机动。但是受制于航行器的自身体积和电池技术的限制,AUV的续航能力较差,难以维持较大的巡航范围。因此,为了最大化开发AUV的工作能力,需要新型的能量传输技术。
无线充电技术(Wireless power transmission,WPT)在近几年大力发展,能有效提高充电设备的可靠性和便捷性。现有的水下无线充电系统主要是基于感应耦合式传输技术。目前用于AUV无线充电的耦合装置类型有锥形、罐形、E形、环形以及分段式环形等。在国内针对水下耦合装置结构研究的成果有,西北工业大学王司令等人提出的环形铁氧体磁芯耦合装置[5]、哈尔滨工业大学杨子提出的E型[6]和蔡春伟等人提出的I型磁芯[7]耦合装置、浙江大学李泽松等人提出的罐型磁芯[8]的耦合装置和石建光等人提出的不加磁芯式环形磁耦合装置[9]等。以上装置都有各自的优势和缺陷,对于水下耦合装置的改进,可以参考技术较为成熟的空气中的无线电充电系统。已有的优化方法包括提高增加线圈匝数和导磁截面积来提高磁场耦合度,提升传递能力;减少耦合装置中铁氧体磁芯的过度使用来减少系统的质量和尺寸;添加补偿电路来降低系统损耗。而水下环境与空气环境相比,要考虑装置的密闭性、海洋环境的复杂性、水中的涡流损耗和压力等影响因素。
本文主要通过分析耦合能力的影响因素,来优化并设计针对AUV外形的新型耦合装置磁芯,以提高耦合装置的传输能力和耦合能力。
1 耦合器设计
综合上述已有的磁耦合装置存在的问题,在设计新型装置时,要同时兼顾磁路和电路部分的设计,考虑到耦合装置的整体外观尺寸,以此来适应水下航行器的实际空间。选择添加适当的磁芯来增强装耦合能力,产生更强的磁场约束能力来减小漏磁对系统内部的干扰。最重要的是该装置要有很高的定位能力和容错位能力,能保持较为稳定的磁芯间隙。同时能在原副边位置有一定范围内偏移时,依然保持着较高的耦合能力。
1.1 发射侧结构及磁场分布特点
水下无线充电系统采用SP(原边串联-副边并联)谐振结构作为补偿网络,如图1所示。根据磁路模型理论和磁耦合装置的数学模型,通过公式分析[6]:
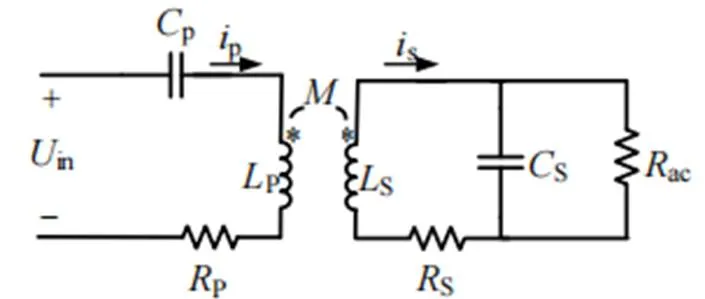
图1 补偿拓扑网络
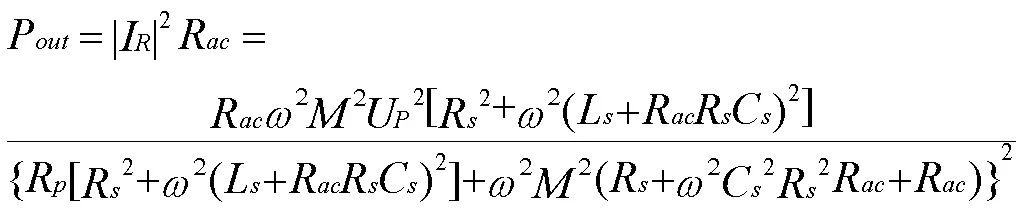
可知系统最大的传输功率和效率不仅与电路参数和工作频率有关,还与耦合能力有关。
除此之外,磁芯材料的选择要满足磁导率高;有很小的矫顽力狭窄的磁滞回线;电阻率要高;有足够大的饱和磁感应强度;磁损率要小;居里温度要高。再综合上述分析的各种结构类型的优缺点,发射端的设计选择了弧形线圈的结构和圆弧状的铁氧体磁芯来尽可能地贴合航行器的弧形外壳,减小发射和接收两端的气隙大小同时增大横截面积,以此来提高耦合能力。同时也能降低磁通在海水中的流通路径长度,从而降低涡流损耗。通过相关研究可知,磁芯两侧面平行的方案相比垂直于内弧面的方案工程有更大的磁芯利用率,可实现性更高[10];双发射结构的传输效果要优于单发射结构[11]。因此最终选择了磁芯两侧面平行的双D发射线圈作为发射测结构。
通过仿真得到图2。

图2 静态发射线圈的磁力线分布图
由图可知,主磁通由B区域发出,经过C区域后,从A区域返回;除主磁通外,还有D区域和E区域对应的两部分微小的漏磁通。这表明双极性耦合方式对磁场的收敛效果明显,对外围产生的漏磁干扰微乎其微。要实现原、副边耦合,让接收线圈包纳C区域主磁通即可。同样需要注意A区域和B区域磁通反向引起的抵消问题,因此接收线圈两边可分别处于F区域和C区域以上区域,此时C区域磁通恰能被收纳,也没有反向抵消作用。
1.2 接收侧设计
AUV内部设备紧密,总体分为三部分,即前后的仪器仓和中间的的电池仓。前端有防撞梁,避障声纳等设备,后端有着艇体螺旋桨、矢量推进器等动力部分,中部为控制部分、各类传感器、浮力材料及电池仓等。尚有空闲空间的部分仅在电池仓的耐压电池下方,上方为浮力材料。因此耦合装置的放置部位就在耐压电池下方。
根据发射测结构通电的磁场分布,磁通经由发射装置一段进入AUV内部,经由AUV内部后,再由发射装置另一端流出,在发射装置中间上方区域构成水平方向磁通。因此在该区域放置垂直的接收线圈,则发射的主磁通恰能被接收线圈接收。而为了提高装置的耦合程度,需要让尽可能多的磁力线穿过接收线圈,那么有效手段便是添加磁芯来聚集磁通并引导磁通。在综合考虑接收装置体积大小和磁场作用空间后,选取了Π型磁芯来引导主磁通穿过接收线圈。
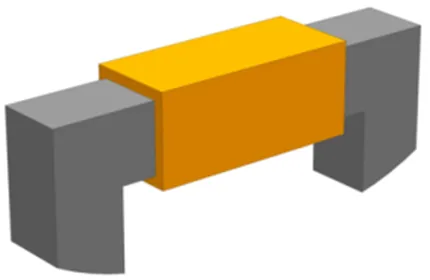
图3 接收侧结构图
1.3 整体结构及有限元建模
最终的耦合装置模型如图4所示。
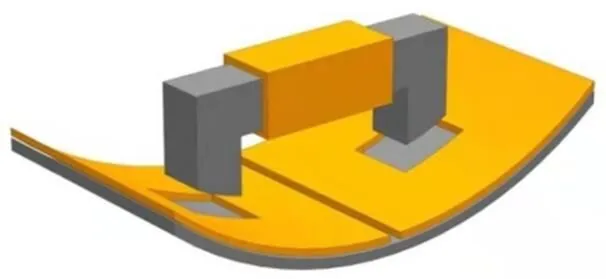
图4 整体结构图
整体系统是由副边线圈(接收线圈)和磁芯和原边线圈(发射线圈)和磁芯组成。原边电路和副边电路通过松耦合变压器相联系。原边电路把电能转换为磁场发射,通过松耦合变压器到达副边电路。副边电路由接收装置接收磁场能量,并通过相应的能量调节装置变换为负载可以直接使用的电能形式,实现非接触感应电能传输。
2 仿真分析
2.1 静态磁场分布图
使用ANSYS有限元分析工具对设计的磁耦合装置进行系统建模,得到下图所示的磁耦合装置轴向切面的磁力线分布图。磁场耦合装置实际应用时与壳体有微小气隙约为2 mm,此处为缓冲材料,如布料、橡胶等。由图可知,在贴近AUV外壳的发射端底部,存在着强磁场分布。磁力线以原边线圈为中心,在空间发散,经过副边线圈形成闭合回路的这些都是有效磁通。大部分磁力线穿过接收端磁芯,实现了发射端和接收端的有效耦合,产生了较强的磁场自约束能力。
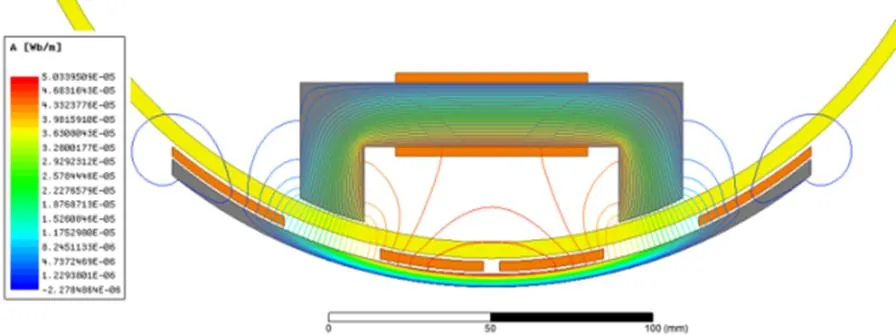
图5 双D发射线圈轴向切面磁力线分布图
静态磁场分布图如图所示,由此也可以看出磁感应强度大部分集中在磁芯上,表明其有着良好的磁场收敛性。即减少了由漏磁产生的对于AUV内部器件的较大影响。弥补了环形磁耦合装置漏磁较大的劣势。
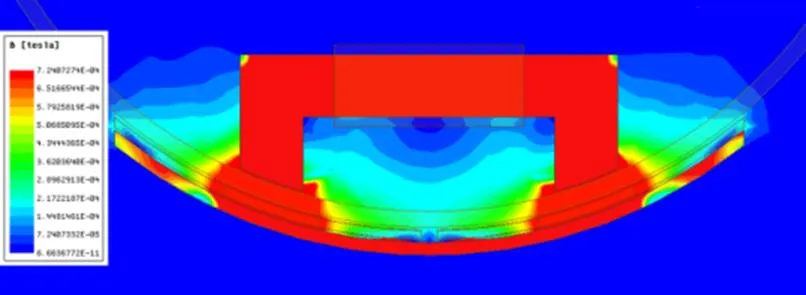
图6 静态磁场分布图
2.2 抗偏移性能分析
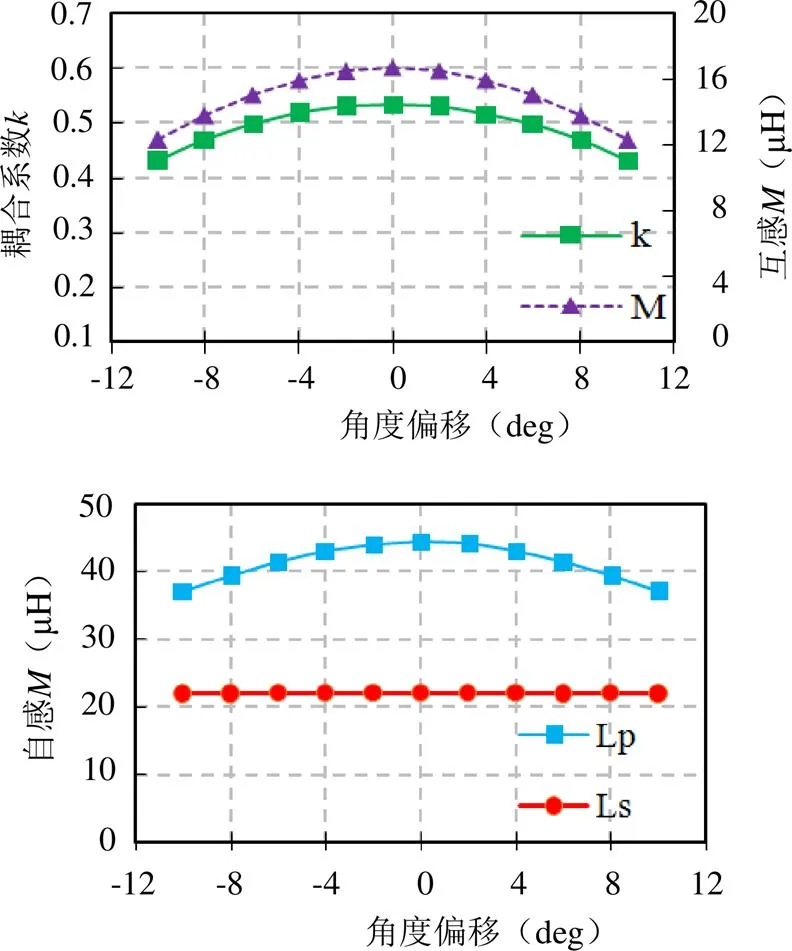
图7 角度偏移变化
实际应用中,耦合装置难以完全固定贴合在对应位置,很容易产生错位现象。错位现象会导致原副线圈的偏离,磁芯位置的不准确,从而影响耦合能力。为了进一步研究该磁耦合装置的容错位能力,并且由上述磁路模型理论可知耦合能力大小与互感系数密切相关。因此借助阻抗分析仪来测试实际的错位对互感系数的影响,从而分析耦合能力的变化量。AUV无线充电系统最常见出现的两种错位是轴向错位和滚动错位,由于本身具备自稳机制,并且充电坞都会安放在洋流流动平缓的地方,因此 AUV 不会出现大角度滚动和轴向错位。滚动-10°和轴向错位-30 mm情况下互感、发射端自感L、接收端自感L和耦合系数随滚动和轴向偏移变化的结果如图7所示。
由图示测试结果可知,在磁芯对准情况下,发射端自感L、接收端自感L、互感分别为44.6 μH、22.0 μH、16.7 μH,对应耦合系数=0.53。因此该设计的磁耦合装置具有较强的耦合能力。当滚动程度增大时,呈现出对称性的圆弧曲线变化。在滚动错位+10°时,跌落最大,此时=12.29 μH,最大跌落4.41 μH。耦合系数和发射端自感L的变化曲线与互感曲线类似,耦合系数最大跌落0.103,接收端自感L相对稳定不变。
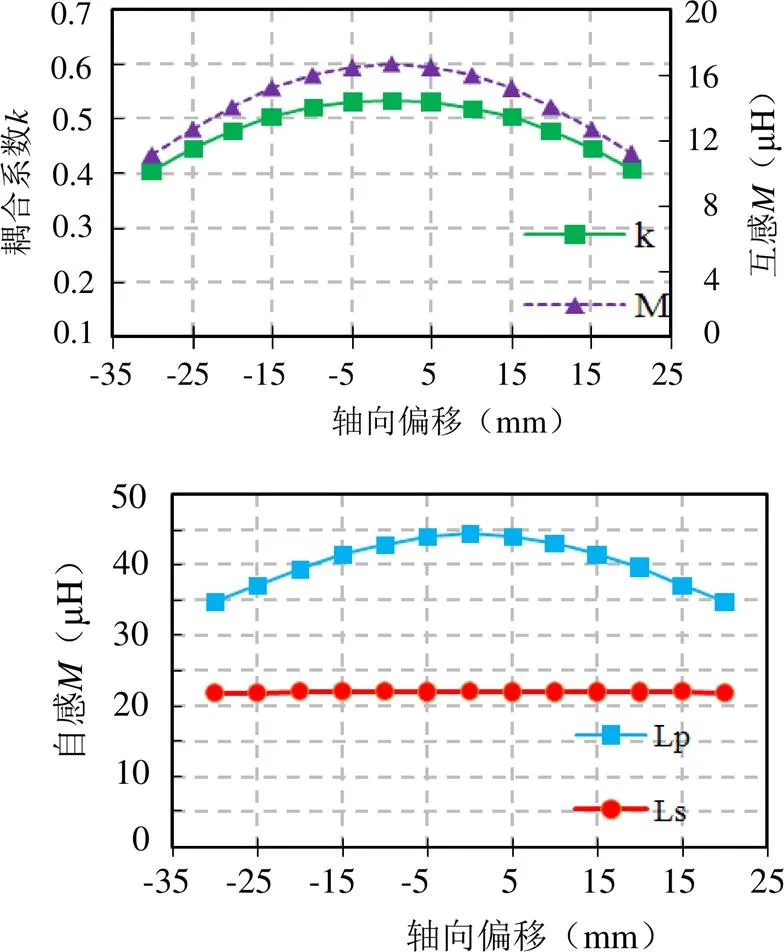
图8 轴向偏移变化
随着轴向错位程度增大,逐渐减小。在轴向错位−30 mm时,跌落最大,此时=11.2 μH,最大跌落5.5 μH。耦合系数由于和紧密相关,因此变化曲线类似,在轴向错位-30 mm时跌落最大,最大跌落0.13。发射端自感L则是在轴向错位+30 mm处跌落最大,而接收端自感L几乎没有变化。综合上述数据可知,在滚动和轴向偏移一定范围内时,该磁耦合装置仍然保持着较高的耦合能力。弥补了如ε形磁耦合装置受AUV滚动错位影响较大的缺点。
3 耦合结构优化
经过上述的实验仿真以及数据分析,该磁耦合装置已经优化了大部分结构产生的影响,但也存在一个明显的问题,接收侧铁氧体体积较大,因而重量大,不仅占用较多空用,还会给航行器在工作时造成一定的负重影响。因此,为了改善这个问题,科学的方法是通过一系列系统数据的收集和分析,从而找到尺寸与耦合程度的平衡点。这样就能兼顾磁耦合装置的规格尺寸大小以及较强的耦合能力。经过仿真得出以下铁氧体宽度D、铁氧体质量和耦合系数的关系图。
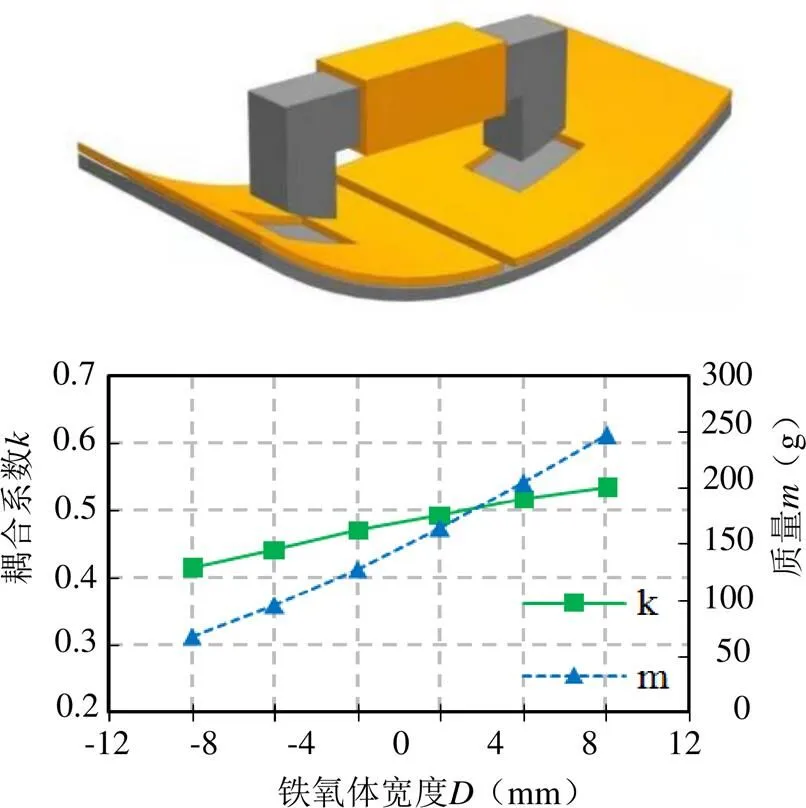
图9 铁氧体宽度D示意图及铁氧体质量和耦合系数k的线性变化
由图可知,铁氧体质量和耦合系数都与铁氧体宽度呈线性关系,质量的变化幅度大于耦合系数的变化幅度。为了不过度影响装置的耦合能力,选取铁氧体宽度D在16 mm左右比较合理,基本属于一个平衡点。在此小区间内,耦合系数的范围在0.49上下波动,仍然保持着较高的耦合能力,但是耦合装置的质量和体积却大幅度下降,从宽度为20 mm时的247.7 g、64200 mm³下降到164.9 g,42731 mm³的尺寸,减少了将近三分之一的体积和重量,满足了改进的要求。
进一步分析研究,磁耦合装置性能不仅由磁芯尺寸参数决定,还与线圈的绕制方式有关。绕制方式包括线圈的绕制位置、绕制层数和绕制疏密程度等等,这些因素对于磁耦合装置耦合系数和错位适应性都有不同程度的影响。
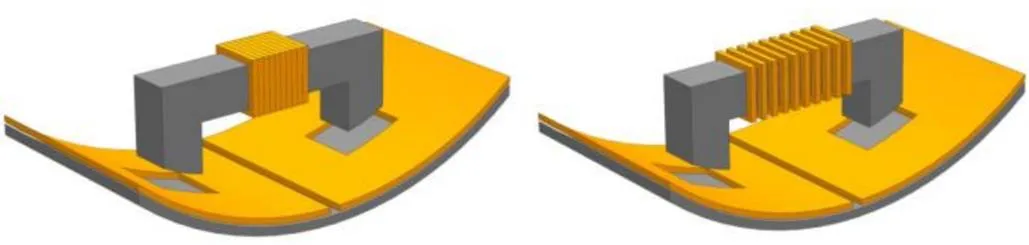
图10 紧密绕制和疏松绕制的示意图
分别测量两种绕制对耦合系数的影响。得到以下图表。
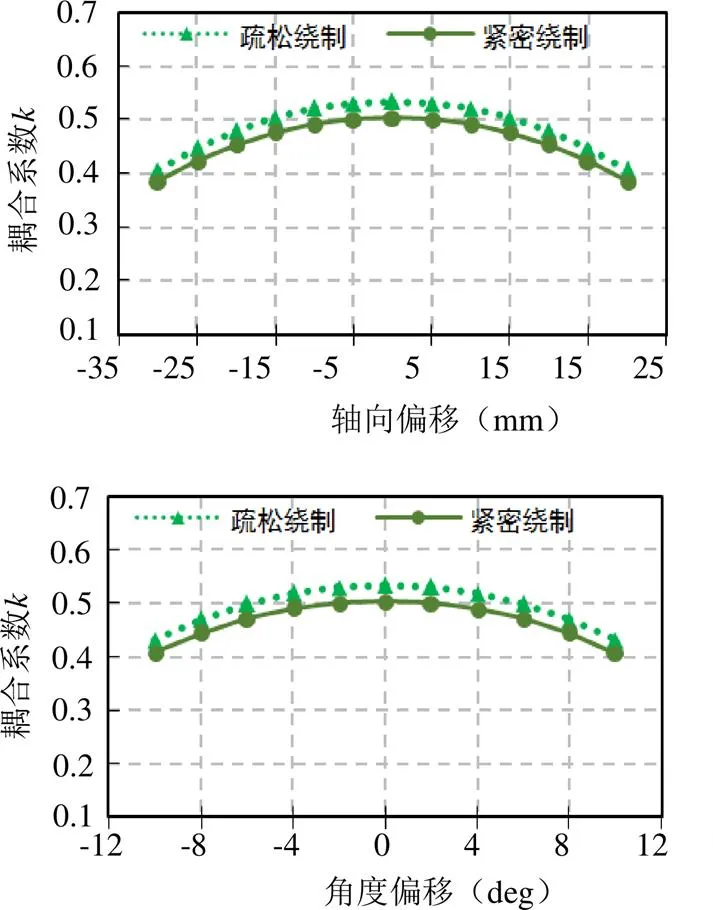
图11 紧密绕制和疏松绕制的示意图
由实验结果可知,在轴向偏移和角度偏移时,疏松绕制的耦合系数始终略高于紧密绕制的耦合系数。在发射端和接收端对准的情况下,耦合系数为0.50。疏松绕制轴向偏移耦合系数最大跌落为0.12,角度偏移最大跌落为0.09,都小于紧密绕制的最大跌落。由此表明,疏松绕制的方法不仅提升了磁耦合装置的耦合能力,同时提高了错位适应性。从磁力线分布图也可以理解,疏松绕制的线圈相对长度大于紧密绕制的线圈,不仅能容纳发射端中心区域上方的水平主磁通,还能接收一部分两侧松散的漏磁通,从而提高了磁力线穿过接收线圈的数量,提升了耦合能力。而在装置发生错位情况时,接收端线圈随着磁芯旋转,一些线圈穿过的磁力线减少,而另一些线圈中穿过的可能会随之增多,所以总体的变化范围要小一些。
4 结论
本文从现有的水下耦合装置出发,明确各类耦合装置的优缺点,并查阅文献了解影响耦合能力及AUV工作能力的多种因素。从而针对性设计发射端结构和接收端结构。最终得到了可适应水下航行器特殊圆弧外形,占用少量空间,自重轻且有较强的磁场自约束能力的磁耦合装置。为水下自主航行器无线充电系统耦合装置的结构优化形成了一定的技术积累。
[1] Purcell M, Gallo D, Sherrell A, et al. Use of REMUS 6000 AUVs in the search for the Air France Flight 447. In: Proceedings of OCEANS’11 MTS/IEEE KONA, Waikoloa, 2011
[2] Bondaryk J E. Bluefin autonomous underwater vehicles: programs, systems, and acoustic issues. J Acoust Soc Am, 2004, 115; 2615
[3] McPhail S, Furlong M, Huvenne V, et al. Autosub6000: its first deepwater trials and science missions. Underwater Technol, 2009, 28: 91-98
[4] 李硕, 刘健, 徐会希, 赵宏宇,王轶群. 我国深海自主水下机器人的研究现状[J]. 中国科学: 信息科学, 2018, 48(09): 1152-1164.
[5] 王司令, 宋保维, 段桂林, 杜喜召.水下航行器非接触式电能传输技术研究[J].电机与控制学报, 2014, 18(06): 36-41.
[6] 杨子. 水下自主航行器无线充电系统耦合装置优化设计及实验研究[D]. 哈尔滨工业大学, 2018.
[7] 蔡春伟, 武帅, 张言语, 刘金泉, 杨世彦. 基于弧形线圈结构的无线充电系统能量传输与控制[J]. 电工技术学报, 2020, 35(14): 2959-2968.
[8] 李泽松. 基于电磁感应原理的水下非接触式电能传输技术研究[D]. 浙江大学, 2010.
[9] Shi J G, De J, Yang C J. Design and analysis of an underwater inductive coupling power transfer system for autonomous underwater vehicle docking applications[J]. Journal of Zhejiang University-Science C, 2014, 15(1): 51-62.
[10] Che B J, Meng F Y, Lyu Y L, et al. Omnidirectional Wireless Power Transfer System Supporting Mobile Devices[J]. Applied Physics A, 2016, 122(2): 1-5.
[11] 武帅. 基于双极性耦合磁场的水下自主航行器无线充电系统设计[D].哈尔滨工业大学,2019.
[12] 吴旭升, 孙盼, 蔡进等. 水下无线电能传输技术及应用研究综述[J].电工技术学报, 2019, 34(08): 1559-1568.
A novel coupler for wireless charging system of underwater autonomous vehicle
Zhang Ziyue
(Beijing University of Technology, Faculty of Information Technology, Beijing100124, China)
U653.95;U658.8
A
1003-4862(2022)06-0076-05
2021-11-20
张梓越(2001-),男,本科。主要从事无线电能传输。E-mail: 2478297728@qq.com