LKJ-15C型列车运行监控系统速度采集优化的探讨
2022-07-03王丹
王 丹
(国能朔黄铁路发展有限责任公司机辆分公司机车监控中心,河北 沧州 062350)
0 引言
列控车载设备通常采用安装在机车轮对轴端的转速传感器采集机车轮对转速,同时结合机车轮径等参数实时计算列车速度和位移,实现测速测距的目标。该测速测距方式具有应用广泛、技术成熟以及精度较高等优点。但是当机车测速轮对发生空转时,如果列控车载设备不能及时准确地检测出测速轮对处于空转状态,仍按照轮对实际转速计算机车速度和走行距离,就会导致计算速度和走行位移高于实际值的情况,从而引发列控车载设备输出制动及计算距离超前等问题。
LKJ-15C 型列车运行监控系统(LKJ-15C 系统)也采用转速传感器对列车进行测速、测距,该系统具备轮对空转检测功能,在检测到轮对发生空转后,根据轮对空转后的机车加速属性对机车速度、走行距离进行抑制处理,以保证当机车轮对出现空转时,测速、测距信息尽量准确,减少非必要制动指令的输出数量,降低重载列车制动在复杂环境下潜在的脱轨、断钩等安全风险。
1 机车轮对空转的原因及危害
1.1 机车轮对空转的原因
机车实际能发挥的牵引力由轮轨黏着决定,轮轨间的黏着力会随着蠕滑速度的改变(V=r·w-v,为轮对半径;w为轮对转动的角速度;v为机车的实际行驶速度)呈现先上升后下降的趋势,并且轮轨间的黏着特性曲线会随机车运行状态而不断变化(如图1 所示)。空转的本质是牵引电机力矩大于当前轮轨黏着力,从而不断地提高轮对的蠕滑速度。从上述特性可以将空转的原因归结为以下2 个:1) 在建立或提升轮轨蠕滑的过程中(启车、加载),牵引电机给定电流过大或机车手牵引柄给定过快,都会使牵引电机快速加速进入最大黏着点,牵引电机力大于黏着力,使轮对蠕滑速度不断提高,从而发生空转。2) 机车轮轨黏着特性发生改变,当前轮轨最大黏着力小于给定力时,牵引电机力矩过剩,蠕滑速度不断增加,从而发生空转。

图1 不同轨条件面下的轮轨黏着特性曲线比较
1.2 影响轮轨黏着特性的因素
机车轮轨黏着特性会受多种动态因素的影响,包括机车设计缺陷、外界环境条件、轮轨表面状态以及轮轨系统振动等,列车在运行中的瞬态黏着特性始终在变化。
轮轨环境及表面状态:在机车实际运行中,干燥清洁轨面的可用黏着系数一般可以达到0.25~0.40。一旦轮轨存在表面潮湿(下雨)、有油污、有冰冻以及轨面有锈蚀等问题,其可用黏着系数急剧下降,条件恶劣时甚至不到0.10。在轮轨面黏着系数较低(例如湿轨)的情况下,可以通过撒砂有效改善轮轨间的黏着状态,理论上可以将黏着系数提升至0.20~0.30,具体结果取决于撒砂系统的效果(例如撒砂系统喷嘴布置方式、下砂量、砂材以及砂子粒径大小等)。
线路条件:线路不平直、有弯道和有坡道都会降低轮轨间的黏着特性。
列车速度:可用黏着系数随列车实际运行速度的增加而略有降低。随着列车速度的提高,列车横向及垂向振动加剧,会破坏轮轨的黏着状态,从而降低机车能够利用的黏着系数。
1.3 测速轮对空转的危害
在重载轨道交通运输中,机车动轮和钢轨之间的黏着力是驱动机运行的最终动力。因此,在重载铁路的运输过程中,必须保证机车轮轨间有效地黏着,避免因机车轮对发生空转而导致LKJ 采集到的轴端速度超过线路的限制速度,监控装置将会输出常用或紧急制动停车指令,使列车停车,这会影响正常的运输秩序。轮对空转会导致轮对擦伤或重伤钢轨,甚至还会导致机车车轮崩裂、脱轨。重载20 000 t 列车小曲线半径紧急制动在多重不利因素叠加的情况下会导致列车发生脱轨、列车颠覆等严重事故。据统计,朔黄铁路在2020 年12 月—2021 年4月装配LKJ-15 型监控装置的机车共发生7 起轮对空转事件,其中5 起造成停车堵塞正线超过10 min,对重载运输造成较大的干扰。
2 系统空转处理原理
2.1 速度取用原理
LKJ-15C 系统采用2×2 取2 安全计算机架构,测速、测距功能由两系安频输入(SFI)插件和2 个脉冲数为72转的霍尔速度传感器完成。每系安频输入插件分别接入2个转速传感器的2 路速度信号,每个速度传感器各输出4路速度信号(图2)。
如图2 所示,I 系SFI 插件通时采集2 个速度传感器(Sensor_I 和Sensor_II)通道1、通道2 的脉冲频率信息。通过4 路脉冲信息的频率和相位差计算该速度传感器采集端对应轮轴的速度、位移和方向。II 系SFI 同理,再对I系和II 系的计算结果进行仲裁算法处理,以确定最终速度信息,从而保证速度信息的有效性。
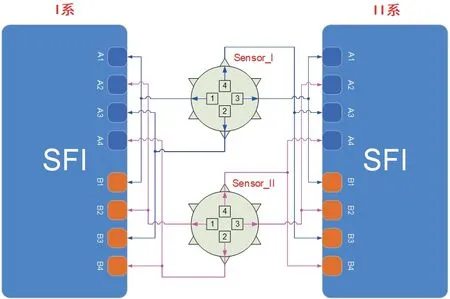
图2 安频输入插件速度信号输入原理图
LKJ-15C 系统测速、测距功能具备较高的冗余能力,在任意1 个速度传感器或任意一系安频输入插件发生故障后,仍能保证测速、测距功能正常运行。SFI 安全频率量插件通过采集速度传感器的频率量信息,同时结合机车轮径信息、传感器脉冲数计算轮对的速度、加速度和运行方向。再根据该机车类型对应的最大加速度和减速度判断机车是否发生空转或轮滑,如果发生空转或轮滑,那么SFI安全频率量插件将按照最大加速度或最大减速度抑制轮对的速度,以获取与实际速度更接近的机车速度,从而输出列车处理后的速度、位移等信息。
LKJ-15C 系统针对采集的多路速度信号,根据一定处理逻辑选取其中某个传感器信号源作为当前速度来源,具体如下:1) 在LKJ-15C 设备上电后,默认取速度传感器Sensor_I作为速度来源。2) 当速度传感器Sensor_I 故障、速度传感器Sensor_II 正常时,取速度传感器Sensor_II 作为当前的速度来源。3) 当速度传感器Sensor_I 空转/轮滑时,如果速度传感器Sensor_II 没有空转/轮滑,则取速度传感器Sensor_II 作为当前的速度来源。4) 当速度传感器Sensor_I 空转/轮滑时,如果速度传感器Sensor_II 也同时发生空转/轮滑,则取速度传感器Sensor_I 作为速度来源。同时,向主机报告发生空转/轮滑。5) 当速度传感器Sensor_I 正常、速度传感器Sensor_II 故障时,取速度传感器Sensor_I 作为当前的速度来源。6) 当速度传感器Sensor_I 正常、速度传感器Sensor_II 空转/轮滑时,取速度传感器Sensor_II 作为当前的速度来源。
安频输入插件给LKJ-15C 提供的测速测距包括速度值(综合2 个速度传感器4 路速度后的综合速度值)、加速度值、走行累计距离值以及方向。
2.2 LKJ 空转处理原则
以HXD1 型机车为例,LKJ 空转处理原则如下:1) 确定最大加速度。机车最大加速度为1.25 m/s,电力货车最大加速度为1.00 m/s; 对2 个数据进行综合得到最大加速度为1.00 m/s。2) 空转开始。当根据速度传感器采集的通道计算原始加速度大于或等于“最大加速度”时,判断该通道状态为“空转开始”,该通道空转时间开始计时。3)空转确认。通道处于“空转开始”状态且通道空转时间超过400 ms 后,判断该通道状态为“空转确认”。按“最大加速度”的1/8 对通道速度进行抑制处理。4) 空转补偿。判断通道处于“空转确认”状态,且维持时间大于“空转一次最长时间”后,判断通道状态为“空转补偿”,对该通道的走行距离进行补偿,不再对通道速度进行抑制。5) 空转后速度切换。判断通道处于“空转确认”状态,且维持时间大于“空转一次最长时间”后,判断通道状态为“空转补偿”,对该通道的走行距离进行补偿,且不再对通道速度进行抑制。
2.3 确定最大允许加速度
不同机车、不同车辆以及组合后的列车的加速性能都不完全相同,LKJ-15C 系统支持机车和车辆的灵活编组,可根据编组情况综合获得列车的最大允许加速度值。LKJ-15C 系统配置每种类型机车的单机加速度和每种类型车辆的加速度。当机车单机运行时,根据该机车的单机加速度取用相应的最大允许加速度;当机车牵引列车时,根据该机车的单机加速度与车辆加速度取最大允许加速度的最小值。例如HXD1 机车配置的最大允许加速度为1.25 m/s,货车车辆配置的最大允许加速度为1.00 m/s,当HXD1 机车单机运行时的最大允许加速度取1.25 m/s,当HXD1 机车牵引万吨重载货物列车作业时,综合后最大允许加速度为1.00 m/s。
LKJ-15C 系统的加速计算如公式(1)所示。
爱国主义是对祖国的忠诚和热爱,是中华民族精神的核心,是中国人民的行为准则体系。新时代爱国主义的本质体现为爱国和爱党、爱社会主义的有机统一,新时代爱国主义的鲜明主题是实现中华民族伟大复兴的中国梦,新时代爱国主义的突出特征是爱国情怀和改革精神、世界眼光相结合。

式中:为2 个程序周期采集到的速度差值;为2 个程序周期的时间间隔。
LKJ-15C 系统在测速处理过程中存在“正常测速”、“空转开始”以及“空转确认”3 个测速状态,各状态之间的转换关系如图3 所示。
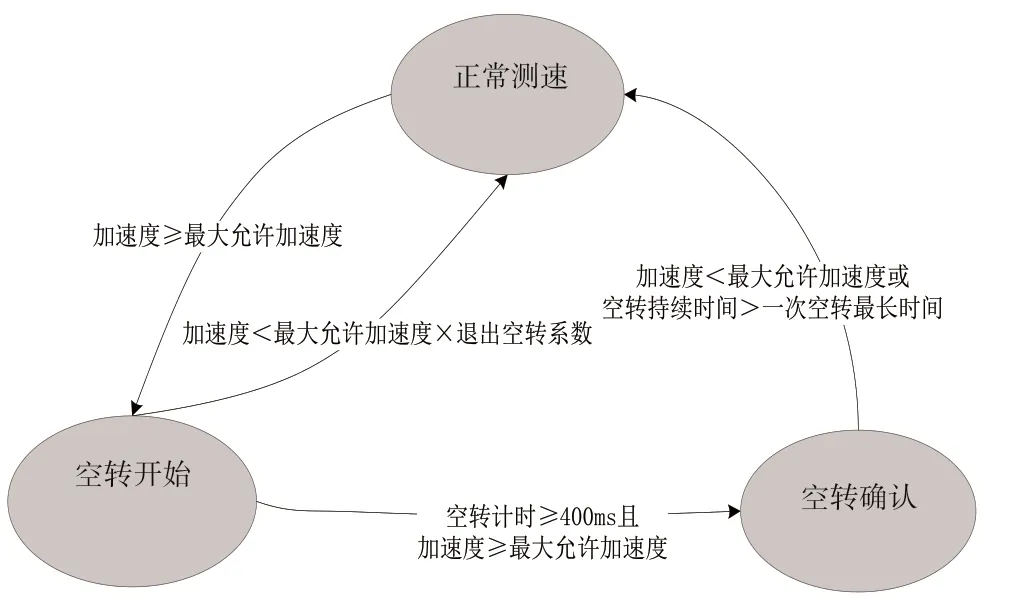
图3 测速空转状态转换图
在LKJ-15C 系统上电后,会将测速状态初始化为“正常测速”状态,在“正常测速”状态下,当采集的加速度大于或等于“最大允许加速度”时,判断为“空转开始”状态,该通道空转时间开始计时。
“空转开始”状态下,在空转开始的计时过程中,如果采集的加速度大于或等于“最大允许加速度×空转识别退出系数”时,就维持空转计时,否则判断为“测速正常”状态。当空转计时时间超过400 ms 且采集的加速度大于或等于“最大允许加速度”时,判断该通道状态为“空转确认”。
3 系统速度采集软件功能优化
对朔黄铁路重载货运列车发生空转的情况进行统计分析,结合线路、机车车辆、转速传感器以及软件空转识别处理逻辑等环节确认LKJ-15C 系统空转启动时机不及时,导致启动空转速度抑制时机较晚,从而触发紧急制动。为解决该问题,可以通过调整LKJ-15C 系统空转识别退出系数(由0.9 调整为0.1,该系数越小,越容易识别出轮对空转状态)来改善系统空转时别的灵敏度,具体如下:1) 调整前。如果机车加速度达到控制参数中设定的最大值(电力货车设定为 1.00 m/s),则“空转开始”。如果“空转开始”后400 ms 内加速度低于1.00×0.9 m/s,则转入“正常测速”状态。2) 调整后。如果机车加速度达到控制参数中设定的最大值(电力货车设定为1.00 m/s),则“空转开始”。如果“空转开始”后 400 ms 内加速度低于1.00×0.1 m/s,则转入“正常测速”状态。
4 程序升级验证
4.1 试验验证情况
针对朔黄铁路装配LKJ-15C 型列车运行监控系统机车在承担重载运输任务中LKJ 空转识别存在未有效识别的问题,对LKJ-15C 系统速度采集软件(SFI 软件)进行优化改进,并在HXD1 型机车进行车载试验验证。验证优化后SFI软件能否更准确地识别轮对空转状态,以满足HXD1 型机车牵引万吨货物重载列车运用需求。
通过在朔黄铁路车载验证试验6 趟,其中前3 趟为数据采集试验,后3 趟为软件优化效果验证试验。分别验证了HXD1 型机车在正常轨面和洒水轨面上的运用情况,具体情况见表1。

表1 HXD1 型机车加速空转试验数据
4.2 试验验证数据分析
对6 趟车载试验验证数据进行分析,优化后的SFI 插件软件在相同轨道物理条件下更容易识别轮对空转,具体情况如图4 所示。

图4 I 系SFI 插件数据
经验证优化后,在HXD1 型机车牵引万吨货物重载列车的加速过程中(洒水轨面条件下),LKJ-15C 系统可有效地识别空转状态并进行抑制,能有效防止因轮对空转而导致LKJ输出常用/紧急制动。试验后将装配LKJ-15C 系统的HXD1型机车全部升级,在7 个月的运行过程中未出现因轮对空转而导致发生LKJ 输出常用/紧急制动事件。
5 结论
对LKJ-15C 系统速度采集软件空转识别功能进行优化改进,将空转识别退出系数由 0.9 调整为 0.1 后,能有效识别机车轮对空转状态,防止因轮对空转而导致LKJ 输出紧急或常用动作指令,消除了重载列车因LKJ 非必要的制动而引发的安全隐患。在重载铁路运输LKJ 安全控制方面发挥了积极作用。
