车路协同场景的新型指纹定位算法
2022-07-01夏小涵邱佳慧杨静远林晓伯
夏小涵,冯 毅,邱佳慧,蔡 超,杨静远,林晓伯,刘 留
(1.中国联合网络通信有限公司智网创新中心,北京 100048;2.生态环境部核与辐射安全中心,北京 100082;3.北京交通大学,北京 100044)
0 引 言
对于自动驾驶车辆系统以及车路协同系统而言,实现车辆的精确定位一直是业务实现的重要手段之一。目前,车辆定位技术主要依托基于GNSS的定位技术,以及基于无线移动通信网络的室外定位技术,其中基于无线移动通信网络的室外定位技术主要包含基于测距模型的定位技术与基于位置指纹的定位技术。
指纹定位技术的特点决定了其在车路协同场景中所面临的诸多问题:
1)定位精度,目前室外指纹定位技术的普遍定位精度为30~66.7 m,很难符合车路协同场景的需求。
2)数据来源,指纹库的建立很大程度上依赖于MDT数据的上报。车路协同场景主要依托于SL链路以及路侧设备(Roadside Unit,RSU)的广播通信,难以直接获取相关数据。
3)设备部署问题,路侧设备的部署方式往往是沿路部署,并不规则。在车辆行驶过程中接收到主服务以及邻小区设备的信号强度也会快速变化,这使得指纹库很难修补缺失的数据来形成可训练的数据集和统一完整的栅格化区域。
本文提出一种车路协同场景下的指纹定位方案,考虑到指纹库的数据源问题,以各个RSU的固定位置为原点,利用AOA(Angle of Arrival)建立相对位置指纹库。为提高估计精度,使用一种基于最小方差矩阵束(Total Lease Squares Matrix Pencil,TLSMP)的AOA测量方法,同时建立了极坐标栅格化方法来降低AOA在计算过程中的差损。此外,提出了RSU子指纹库的概念,极大地减少了信令交互的传输时延,并可以依据OBU参数做出精确的误差修正,保证了定位的精确度和实时性。
1 车路协同场景的新型指纹定位技术系统架构
无线信号在空间中传播,信号的多径传播对环境具有依赖性和特殊性。对于固定的位置点而言,其对应信道的多径结构可视为近似惟一,该信号特征可以认为是该位置的“指纹”。终端利用阵列天线等手段检测信号的导频幅度等特性,可以提取出信号特征参数。确定定位区域并进行数据清洗之后,系统会根据RSU获取的一些特征值做预处理,预测点位的到达角属性,并加入点位的自身签名之中。预测的到达角将在之后的匹配过程中还原点位的实际位置。清洗完后系统根据不同RSU的工作区域,将待测区域分为重叠的多个子区域,完成栅格构建、数据处理、学习建模、数据匹配的整个过程,最后整合子区域的处理结果,输出定位位置。本文提出的车路协同场景的新型指纹定位技术系统架构如图1所示。

图1 车路协同场景下的指纹定位方案流程图
2 车路协同场景下的指纹定位方案关键技术
2.1 车路协同场景下的AOA测量
根据RSU的部署特性以及URLLC场景,本文选取AOA以及RSRP等特征值构建新型指纹库,基于单个时刻的时间采样即可获得必要的指纹库参数。
考虑到车辆行驶场景,本文利用TLSMP算法进行AOA测量,并根据车速对测量结果进行修正。车路协同场景如图2所示,RSU以固定频率广播。为了便于计算,假定车辆处于多天线的均匀阵列接收机的场景,天线数为。
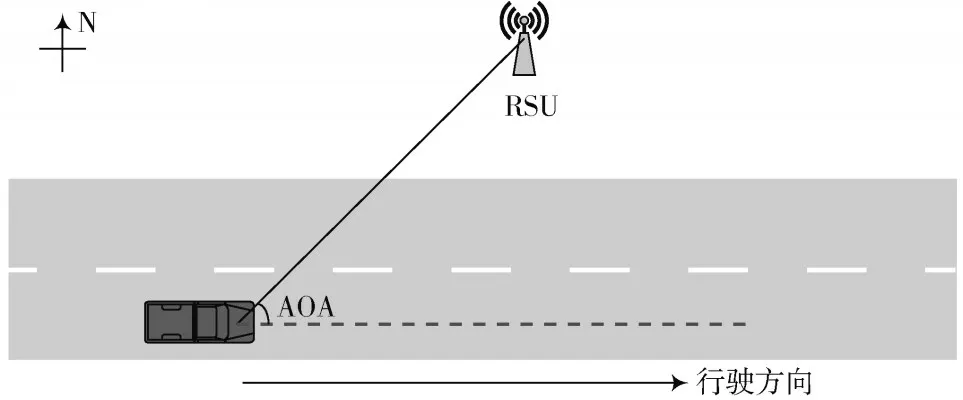
图2 简化车路协同场景
通信车端的视距多径信号如图3所示,轴上为阵列天线排布,实线箭头为接收信号。

图3 车路协同场景中的视距多径信号
根据文献[5],第个OFDM子载波和第个天线阵元的信道响应最小二乘估计可表示为:

式中:ε,κ,φ分别代表第条路径上的复信道增益、信道时延和到达角;e为第个天线阵元的阵列响应,κ(φ)=sin(+cos)为考虑车速的第个阵元到参考阵元的时延间隔,为子载波频率,为电磁波传播速度,为车路行驶速度,可以从车载OBU获取;为加性高斯白噪声。
考虑到双工天线的间隔一般设计为半波长,并远小于传播路径长度。同时,当相邻子载波频率间隔大于相干带宽时,子载波衰减相互独立,ε可视为第个子载波的独立衰减。在这个短时间间隔内车速可近似视为恒定,且远小于电磁波传输速率。接收端信道估计可简化为:

接收端CFR估计矩阵为:



式中:Σ=diag{,,…,λ}为信号源矩阵,为较大特征值的合集;Σ=diag{λ,λ,…,λ}为较小特征值的合集,作为噪声矩阵。以作为矩阵束窗口长度,用标量定义矩阵束为-。其中为信号源矩阵1~-1列,为信号源矩阵2~列。求解矩阵束在零空间上的广义特征值如下:



2.2 基于RSU的车路协同指纹定位技术栅格设计
基于RSU的车路协同指纹定位技术栅格设计可分为栅格区域构建、数据清洗、指纹库构建、模型参数优化等4个功能子模块。
1)栅格区域构建
基于RSU的部署方式和广播特性,这里采用极坐标的栅格化方法来记录车辆与RSU的相对位置。选择测量点的RSRP、AOA、到RSU原点的距离半径作为指纹库中的参考位置参数。由于RSU的位置参数已知,所以通过相对RSU的位置参数,既可以获得车辆定位估计,也可以利用不同RSU之间的设备标识进行快速区域切换下的位置估计。
车辆行驶过程中,车载OBU可以同时接收多个RSU信号并加以识别。RSU的覆盖为不规则的扇形区域,有效半径约在500 m。因此,在RSU覆盖边缘测的点上常需要对不同子指纹库进行综合加权评估以提高预测精度。
2)数据清洗
数据清洗对于指纹定位的精确性至关重要。根据上报的MR信息,实际收集到的指纹标签数据的清洗标准包括:有明确的特征信息,含公参信息和经纬度信息;缺失信息尽可能少,至少包含2个以上服务RSU的小区ID和信号强度值;无明显离散特征,源数据的结果没有特别大的位置偏移,且信号强度在允许的波动范围内。满足上述特征的源数据,将随机分类作为训练模型和测试模型。
数据清洗流程如图4所示。

图4 数据清洗流程
3)指纹库构建
针对每个RSU的覆盖区域,以RSU为原点,以地图正东作为0°极坐标半径位置,如图5所示。

图5 以RSU为原点的栅格划分
划定的区域按既定规格进行栅格划分,并根据相对的方形区域的面积把整个区域均匀地划分为若干栅格,并进行编号。每个栅格中心点都将转化为独有的AOA以及与RSU的半径长度组成的极坐标,并包含多个指纹特征信息。不同RSU拥有各自的指纹库。
4)根据模型预测定位并修正模型
利用建立好的模型对测试数据进行预测,可以将预测结果与实际的终端位置信息进行比较,从而可以得到模型预测准确度的量化结果,进而反馈优化模型。
2.3 基于WKNN算法的车路协同指纹定位预测
本文利用基于加权K近邻(Weighted K-Nearest Neighbor,WKNN)算法来实现车路协同指纹定位方案。通过对位置-信号强度库的直接训练形成指纹库,并通过此模型直接预测输出待定位目标的实际位置。
1)指纹库生成:主要是创建数个基于RSU为原点的完整的RSRP与AOA,极坐标半径对应的指纹库。为了保持定位精度,栅格指纹库需要定期维护与更新。
以栅格中心点作为栅格坐标点,指纹库的坐标标记可记为:

其中第个训练点的签名可记为:

在每个训练点的签名中,l =[l,l,…,l]代表终端获得的当前RSU和相邻RSU的位置向量,P =[p,p,…,p]为训练点在每个RSU区域的RSRP分量。由于训练点有可能在同一位置重合,P 设定为规定时间的均值。考虑到终端的初始位置随意,以及各种衰落和切换等原因造成的小区信息缺失,在数据清洗之后,指纹库的签名集合可以表示为:

结合前文提到的极坐标指纹库的建立,建立的联合签名集合为:

式中:φ为2.1节中获得的栅格AOA角度;r为栅格极坐标半径。
2)位置预测
测试点签名为R={r ,P},取最近邻点个,则KNN的相似度距离对比为:

在不同RSU子区域中,小区参数与预测结果权重不同(当前主服务RSU对应的子栅格位置预测权重最高)。这里设定加权系数为=(,,…,P)。同时,在位置估算中为了减少数值影响,将距离加权系数归一化。选取自由度的近邻距离,计算WKNN的测试估算距离为:

根据估算距离可以获得目标节点的预测位置,进而代入原模型中进行进一步的反馈修正,获得合适的学习参数。调整完之后的模型即可作为对未知目标的定位使用。
3 实验仿真结果分析
本节将对整体进行仿真实现,并相对于原始GNSS坐标给出量化的比对指标。仿真参数如表1所示。
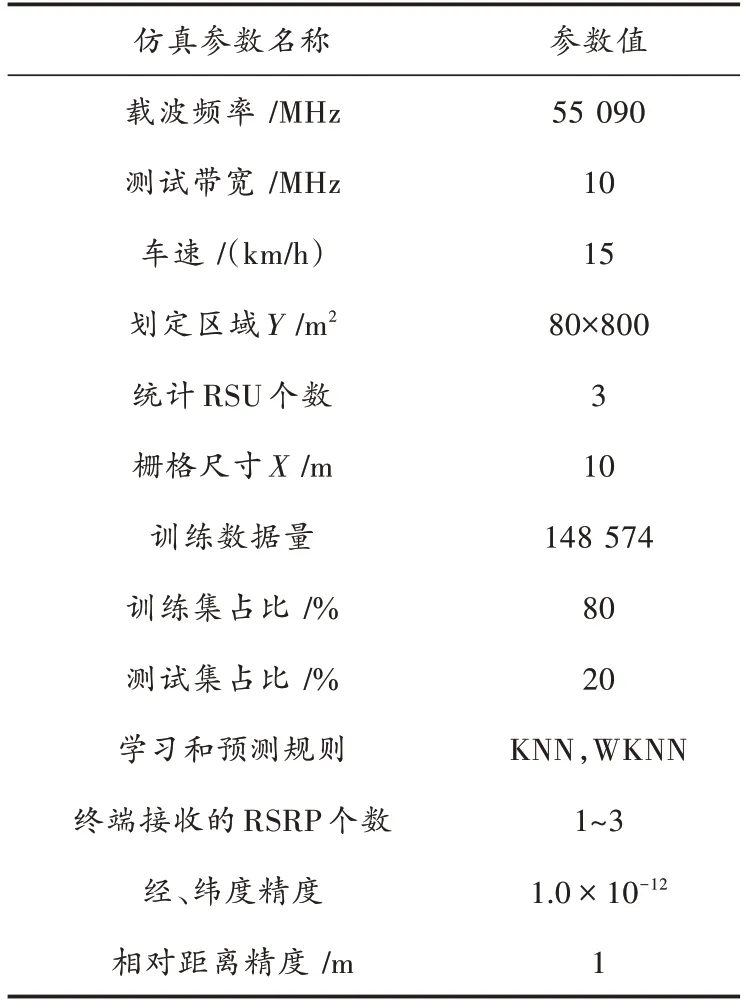
表1 仿真系统参数
3.1 RSU子栅格化处理
以3个RSU为原点,对主干道进行栅格化处理,获得各自的指纹库栅格如图6所示。

图6 不同RSU对应指纹库栅格
其中浅色实线栅格为RSU1的栅格划分,浅色虚线栅格为RSU2的栅格划分,深色虚线栅格为RSU3的栅格划分。这种子指纹库的实现可以提高算法适配精度,并完成定位的区域平滑切换。
3.2 源数据清洗
由于车辆运动的特征,一般在路口区域数据会较为密集,快速道路上会比较零散。根据2.2节的清洗标准对源数据进行清洗,清洗前后的数据如图7所示。
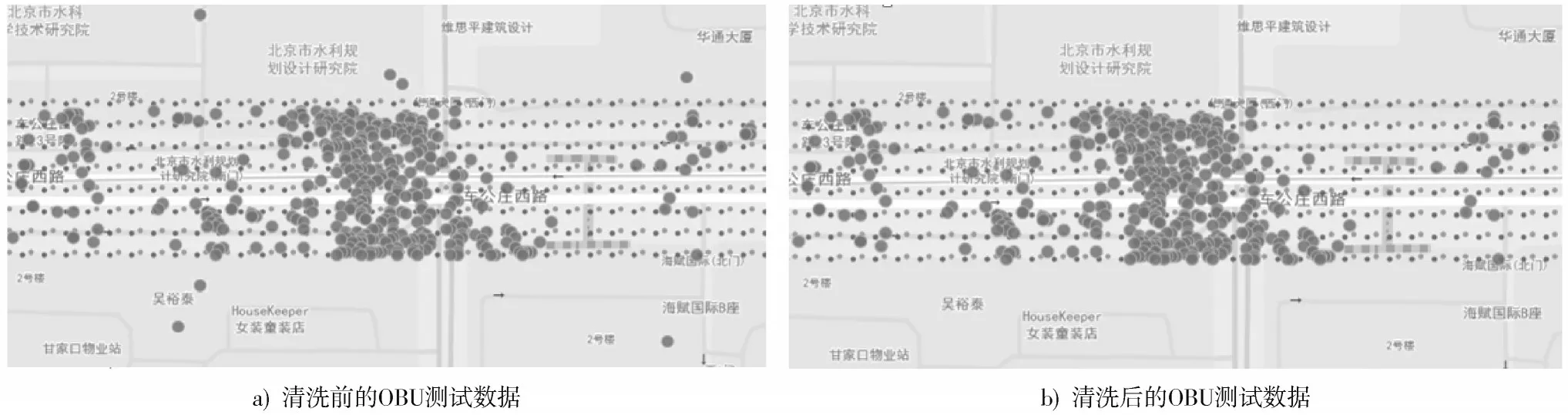
图7 OBU测试数据清洗
3.3 测试集的预测结果反馈
进行子栅格定位并做加权处理,获得测试数据的定位结果和原位置的对比如图8所示。

图8 WKNN算法预测结果与原始位置对比
其中浅色点为预测点,深色点为普通点,从图8中可以看出,数据点比较密集的区域,定位结果偏移要明显小于数据点稀疏的区域,显示出更好的聚类属性,定位结果会更加精确。权重系数代表相邻RSU的RSRP相对当前服务RSU的RSRP的权重。调参结果表明,当在0.4~0.5时,定位的精度结果相对较好。
3.4 仿真结论
以预测值和实际值的欧氏距离为定位精度,定位精度和定位分辨率定义如下:
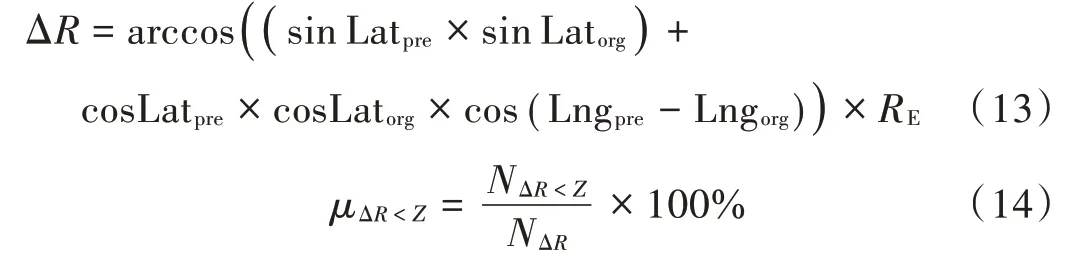
式中:Lng、Lat为定位点预测经纬度;Lng、Lat为定位点原始经纬度;为地球半径;Δ为定位精度;为精度阈值;为小于精度阈值的点数统计;为定位点数统计;为定位准确率。
图9为该方案在测试集的预测精度CDF图,与传统直接利用KNN算法预测的结果对比,可以看出训练模型的预测结果在准确度上符合预期。
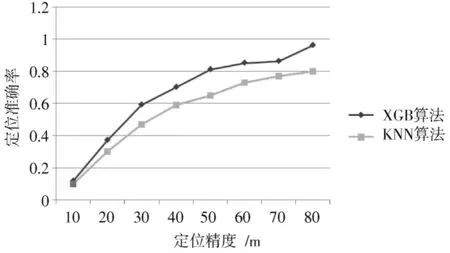
图9 方案在测试集的定位精度CDF图
4 结 语
本文研究了车路协同场景下的新型指纹定位算法。通过分析C-V2X的特殊场景以及当前定位方式的特点,给出了基于AOA参数测量的极坐标指纹定位。针对车联网中无法准确获得指纹标签的问题进行补充处理,提高了指纹定位在车路协同系统中的适应性和精确度,并详细给出了如何测量车辆AOA参数的方法以及如何建立基于RSU的极坐标子指纹库并进行定位。最后通过仿真结果证实新算法的可适用性。由于源数据的漂移影响,新算法在定位精度上还无法做到十分精确,不过在实际环境中已经可以支持部分实时性要求不高的通知类业务需求,为车联网融合定位提供了一种新的思路和方法。
