基于多星联合的雷达精度鉴定方法研究
2022-07-01田堂胜祝开建王启超王蔚东黄志询
陈 焱, 田堂胜, 祝开建,3, 王启超, 王蔚东, 黄志询
(1.中国人民解放军63768部队, 陕西西安 710600; 2.中国电子科技集团公司第三十八研究所, 安徽合肥 230088; 3.宇航动力学国家重点实验室, 陕西西安 710043)
0 引言
各国太空作战力量的不断发展对空间事件响应能力提出越来越高的要求。雷达作为空间目标探测的骨干装备,为空间事件研判和处置提供了丰富的底层数据支撑。雷达测量精度是雷达的主要战技术指标之一,代表雷达测量目标的准确程度,直接影响目标定轨精度,进而影响空间事件响应的准确性和敏锐性。因此,雷达数据汇集处理中心亟需建立常态化精度鉴定机制,快速、准确地分析雷达测量误差,及时发现数据问题,提高装备可靠性。
雷达测轨数据精度分析工作基于雷达标校技术得以开展,雷达标校技术经过长期的发展优化,形成了包括标校塔标校、气球标校、微光电视星体标校、球载BD/GPS标校、射电星角度标校民航机标校、卫星标校等标校方法。其中,卫星标校方法可有效解决因雷达口径大及分布地域广不宜建标校塔的问题,但在实际应用中主要存在两大制约因素,一是卫星精密轨道的易获取性,这直接影响精度鉴定工作的便捷性;二是短时间内卫星相对雷达的过境频次,这决定了精度鉴定工作的时效性。针对上述两个问题,文献[2-4]分别从标校星精密轨道确定方法、北斗精密星历在装备精度鉴定中的应用、多弧段卫星精密星历误差补偿效果等方面展开研究,为雷达精度鉴定提供了有力参考。
结合文献研究及常态化标校需求,本文提出了一种基于多星联合观测的雷达测轨精度鉴定方法,该方法以可公开获取精密星历的卫星为标校星,安排待标校雷达依次跟踪多颗不同轨道高度的卫星以获取具有差异性的原始数据,较好地解决了星历获取和短时间数据量积累问题,同时提出了计算单圈次跟踪误差、多圈次总误差的方法综合反映雷达测轨水平。基于多星联合标校,本文对雷达测轨精度分析过程进行了详细研究,并结合雷达实测数据对该方法在雷达测轨精度鉴定及装备状态监测中的应用意义进行了探讨。
1 卫星标定原理
卫星标定以运行于空间近地轨道的人造地球卫星为基准目标。其基本原理为:被鉴定装备跟踪测量空间特定的卫星目标,获取测量数据;同时,获取该卫星对应于测量弧段的精密轨道数据,将测量数据与卫星精密轨道数据进行对比分析,结合装备战技术指标对其精度作出评估。可从随机误差、系统误差和总误差等多角度反映雷达测量数据精度,定义及公式如下:
1) 系统误差
系统误差反映测量值与真值的符合程度,即装备测量的准确度,用测量值与真值一次差的均值定量表示。
=-
(1)
(2)
式中,表示雷达测量数据,表示对应时刻的卫星精密位置。
2) 随机误差
随机误差反映对同一真值进行的一组测量值的接近和符合程度,即装备的精密度,用测量值与真值一次差的均方差值定量表示。

(3)
3) 总误差
总误差综合反映装备某一时间段内测量残差的系统差及随机差,用均方根误差(RMSE)定量表示。
第圈次任务弧段总误差为
(4)
m个圈次任务的总误差为
(5)
2 多星联合标校可行性分析
雷达在跟踪空间目标的过程中受大气影响,导致对不同轨道高度的目标之间的测轨精度存在偏差,因此选取的标校星应尽可能覆盖不同轨道高度以较全面的评估装备跟踪精度。同时考虑到精密星历的易获取性,优先选择我国天平一号标校卫星及带有激光反射器且参与国际联测的卫星作为标校星,参考文献[6]对开源CPF星历精度的分析,选定LARETS、STARLETTE、LARES、AJISAI以及TianPing1A、TianPing1B等6颗卫星作为标校星目标集,卫星轨道信息如表1所示。
选择4台(套)布置于东线和西线的雷达装备,对表1中的标校星作7日可见性分析,各装备对每颗卫星日均可见圈次如图1所示。由图1分析可得,位于4个点位的雷达装备对6颗标校星每天均有可见圈次,其中,位于东北线的雷达对LARES、LARETS、TianPing1A、TianPing1B等4颗卫星的日均观测圈次较多,可达4~8圈次,东南线的雷达对LARES、AJISAI、STARLETTE等3颗卫星的日均观测圈次可达3圈次以上,西南线的雷达对LARES、AJISAI、STARLETTE等3颗卫星的日均观测圈次可达2圈次以上,西北线的雷达对LARES、AJISAI、STARLETTE等3颗卫星的日均观测圈次可达3圈次以上。通过安排待鉴定雷达依次跟踪3~4颗标校星,在综合反映雷达对不同轨道高度目标之间测轨精度差异的同时,又可满足较为紧急的装备精度鉴定任务,基本可在一天内完成10圈次以上的数据积累。

表1 低轨标校星轨道信息表
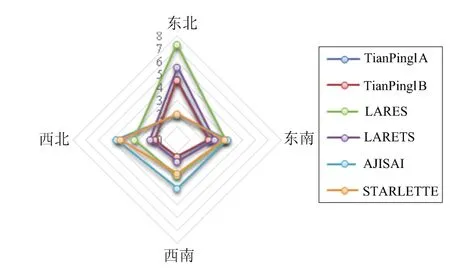
图1 标校星日均过境圈次
3 精度分析计算方法
利用卫星精密星历对雷达测轨数据进行精度分析,需先将卫星精密位置与雷达对目标的测量位置统一至相同的时间、空间基准下,然后将真值数据与修正后的观测数据作差并进行数学统计。
3.1 标校星位置计算
3.1.1 时间转换
CPF星历以简化的儒略日(MJD)和一天中的世界协调时(UTC)秒数给出卫星对应的时刻,而雷达测量数据的时间统一为北京时间(BJT),其中MJD与公历之间的转换关系为
(6)
式中,,,分别表示公历的年、月、日。
3.1.2 星历插值
天平一号卫星轨道产品的时间间隔为10 s,CPF星历时间间隔为180 s或240 s不等,而雷达测量数据的数据率较高,通常为0.05 s或0.5 s一个采样点,即雷达观测数据与精密星历的时间不同步,需要通过插值或外推拟合来获取雷达观测时刻标校卫星的精密位置。格朗日多项式插值法被广泛用于卫星轨道插值,其定义为:设在+1个时间为,,…,+1插值节点上卫星的坐标分别是(),(),…,(+1),那么在任意时刻卫星的坐标可以表示为
(7)
利用式(7)对精密星历的、和方向分别插值处理,即可得到任意时刻卫星的位置。拉格朗日插值采用已知的多项式来近似,其阶数与所选的插值节点的数量有关,若选取了个节点,则插值的最高次数为-1。需要注意的是,在一定范围内插值阶数越高,插值引入的误差就越小,但并不是越高越好,一方面随着插值阶数的增加,计算耗时就越高,且需要更冗余的精密星历,另一方面是因为在拉格朗日高次插值时易产生所谓的龙格震荡现象,反而影响插值精度。文献[7]研究表明,在插值点位于节点中央的情况下,插值阶数不宜少于8阶,当插值点不在节点中央时,插值的阶数至少应达到9阶。
3.1.3 坐标转换
天平一号卫星星历及CPF星历均以地固坐标系为基准,需转换至以待鉴定雷达为中心点的测站坐标系。由地固系转为测站系可分两步完成,首先利用坐标旋转,将地固系坐标_转换为以测站为中心点的东北天直角坐标_,然后将测站系下直角坐标_转换为测站系下球坐标_。
定义绕、、轴的旋转矩阵如下:
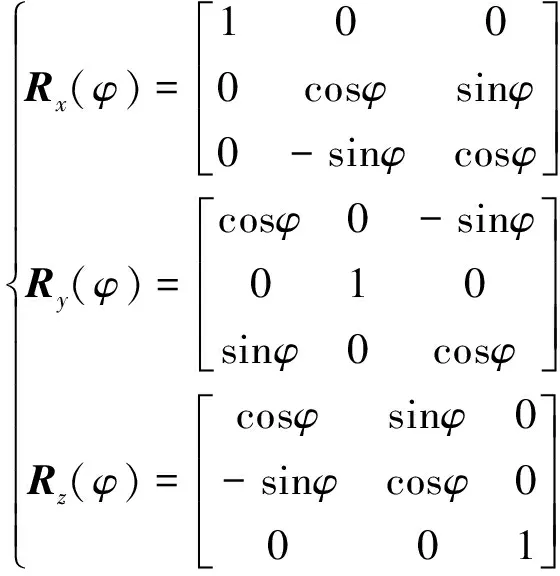
(8)
1) 地固系到测站东北天直角坐标系
转换公式为
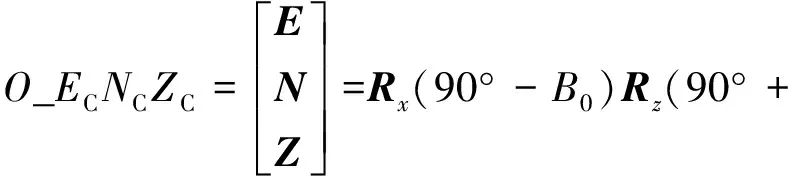
)(-)
(9)
式中,为卫星精密位置,、、为雷达站大地经度、纬度和高度,为雷达站址在地心坐标系下的表示,与雷达站经度、纬度和高度可通过式(10)转换得到

(10)
式中:
(11)
为地固系下的椭球长半轴,=6 378 137 m;为地固系下的椭球体的第一偏心率,=0.081 819 190 842 55。
2) 测站东北天直角坐标到测站极坐标
本质是将直角坐标系的三维参数转化为球坐标系下的三维参数,结合测站坐标系下方位、俯仰的定义,转换公式为
(12)
3.2 测量数据预处理
3.2.1 异常值检测及修正
雷达测轨数据中因太空环境干扰、人员操作过失、数据传输线路故障等多种因素,往往存在明显不合理的数据点,即野值点,这些数据点会对装备精度分析结果造成干扰,应予以剔除或修正。利用经验值法和最小二乘法可对野值进行识别检测。
经验值法是以空间目标相对雷达测量站的位置及目标运动属性为依据,可推断雷达测距、测速、测角符合以下规律:
距离>100 km,速度绝对值<9 km/s,方位角0°≤<360°,俯仰角0°≤<90°。对于不在范围之内的数据即可确定为野值点,并进行剔除。

3.2.2 光行差修正
3.2.3 大气折射修正
在语义网的七层结构中,根标记语言(XML Schema)层、资源描述框架(RDF Schema)层、本体(Ontology)层主要用于标识Web信息的语义,是系统的核心和关键所在[3]。通过对万维网上的文档添加能够被计算机所理解的语义“元数据”,语义网使整个互联网成为一个通用的信息交换媒介。在语义网的整体设计中,URI、RDF框架模型和本体的引入,打破了信息资源知识组织传统的、平面的、单维的链接模式,形成了立体的、异构的、多维的语义链接。
对流层折射修正是对电磁波通过对流层时由于传播速度的变化以及传播路线弯曲而产生的折射误差所进行的修正。
对于雷达测量数据,经典的大气折射误差修正公式如下:
通过式(13)~(14)计算得到大气折射修正后测站至卫星空间距离值′:
′=-Δ
(13)
修正量Δ为

(14)
通过式(15)~(16)计算得到进行大气折射修正后的俯仰角度值′:
′=-Δ
(15)
修正量Δ为
(1-e-20000)
(16)


(17)
式中,地面水气压为

(18)
公式中涉及的参数意义见表2。
表2 大气折射修正参量
4 应用案例
4.1 测轨精度鉴定
用本文方法对某型雷达测轨精度进行鉴定,该雷达精度指标为距离项优于10,方位项和俯仰项均优于360″,根据标校星选择方法,选取1、1、和等4颗开源精密星历精度在3以内且轨道高度不同的卫星作为本次精度鉴定试验的标校星。
2021年2月15日至2月17日,安排该雷达跟踪4颗标校星,对12圈次测量数据进行残差统计计算,图2~图5为其中4圈次的残差曲线图,表3为12圈次残差统计结果。在数据统计处理过程中,利用3门限对残差较大的点进行了剔除,为达到较好的野值剔除效果,采用循环多次剔野值的方法,同时为保证合理的数据利用率,设置85为野值剔除下限并认定数据可用率不足85的测量弧段为质量较差弧段,不采信该弧段鉴定结果。
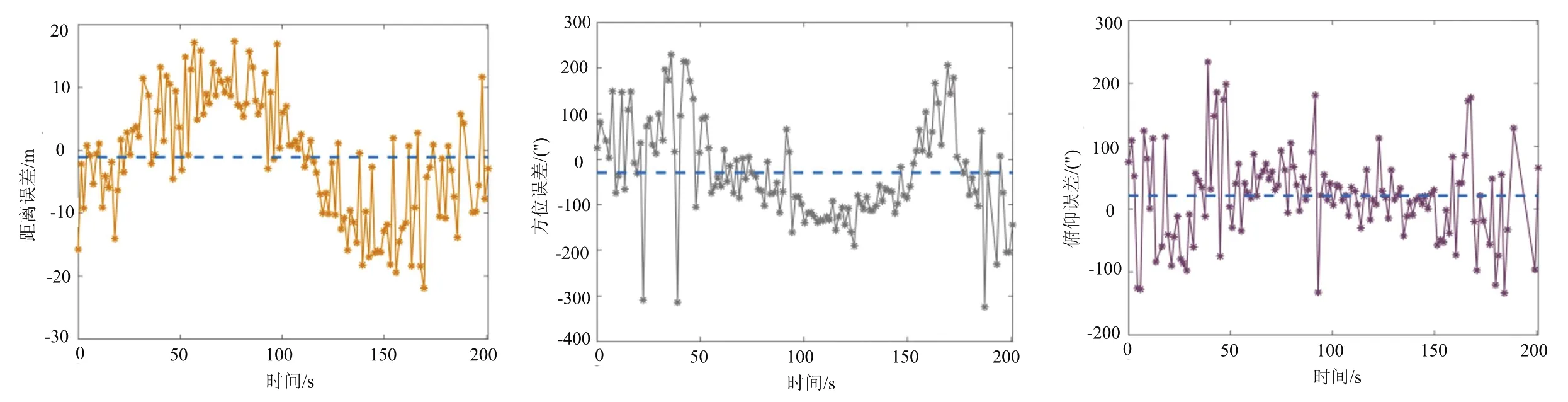
雷达于2月15日18时54分跟踪卫星,共跟踪534,测量354个点,对距离项、方位项、俯仰项分别进行野值剔除及残差统计,其中距离项数据利用率为97,统计残差均方差为5.47,残差均值为-3.23;方位项数据率利用率为98,统计残差均方差为202.69″,残差均值为-31.50″;俯仰项数据率利用率为96,统计残差均方差为188.21″,残差均值为79.65″。距离、方位、俯仰3个测量维度的测量值与真值一次差随时间变化曲线如图2所示,距离项残差以-3为基准上下波动,波动幅度基本保持在6以内,方位项残差以-31″为基准上下波动,波动幅度基本保持在200″以内,俯仰项残差以80″为基准上下波动,波动幅度基本保持在190″以内,残差数值分布区域与残差均方差值一致。
雷达于2月15日22时10分跟踪卫星,共跟踪748,测量493个点,对距离项、方位项、俯仰项分别进行野值剔除及残差统计,其中距离项数据利用率为97,统计残差均方差为8.91,残差均值为-4.46;方位项数据率利用率为99,统计残差均方差为166.22″,残差均值为-44.66″;俯仰项数据率利用率为92,统计残差均方差为77.71″,残差均值为19.90″。距离、方位、俯仰3个测量维度的测量值与真值一次差随时间变化曲线如图3所示,距离项和俯仰项数据稳定性较好,方位项数据波动幅度较大。
雷达于2月17日19时28分跟踪1卫星,共跟踪201,测量132个点,对距离项、方位项、俯仰项分别进行野值剔除及残差统计,其中距离项数据利用率为99,统计残差均方差为9.51,残差均值为-1.09;方位项数据率利用率为98,统计残差均方差为109.37″,残差均值为-29.54″;俯仰项数据率利用率为95,统计残差均方差为71.61″,残差均值为21.19″。距离、方位、俯仰3个测量维度的测量值与真值一次差随时间变化曲线如图4所示,俯仰项数据稳定性较好,距离项和方位项数据波动幅度较大。
雷达于2月17日19时29分跟踪1卫星,共跟踪203,测量135个点,对距离项、方位项、俯仰项分别进行野值剔除及残差统计,其中距离项数据利用率为100,统计残差均方差为10.25,残差均值为-0.24;方位项数据率利用率为100,统计残差均方差为68.47″,残差均值为-33.26″;俯仰项数据率利用率为99,统计残差均方差为42.57″,残差均值为0.65″。距离、方位、俯仰3个测量维度的测量值与真值一次差随时间变化曲线如图5所示,方位项和俯仰项数据稳定性较好,距离项数据波动幅度较大。
由表3可见,在计算过程中对野值点剔除后数据利用率保持在92以上,数据可用率较高。从12圈次数据残差统计结果来看,距离项总误差为8.94,方位项总误差为142.28″,俯仰项误差为163.04″,均优于装备精度指标。从每圈次残差统计结果来看,距离、方位、俯仰3个测量维度的系统差绝对值相对同维度的随机差普遍偏小,说明该装备3个测量维度的准确度高,但测量稳定性稍差;距离项系统差绝对数值小于5,但符号均为负值,后续通过修正距离系统零值可进一步提高测距精度水平。

(a) 距离项残差图 (b) 方位项残差图 (c) 俯仰项残差图图2 跟踪LARES卫星误差残差图

(a) 距离项残差图 (b) 方位项残差图 (c) 俯仰项残差图图3 跟踪AJISAI卫星误差残差图
(a) 距离项残差图 (b) 方位项残差图 (c) 俯仰项残差图图4 跟踪TianPing1B卫星误差残差图
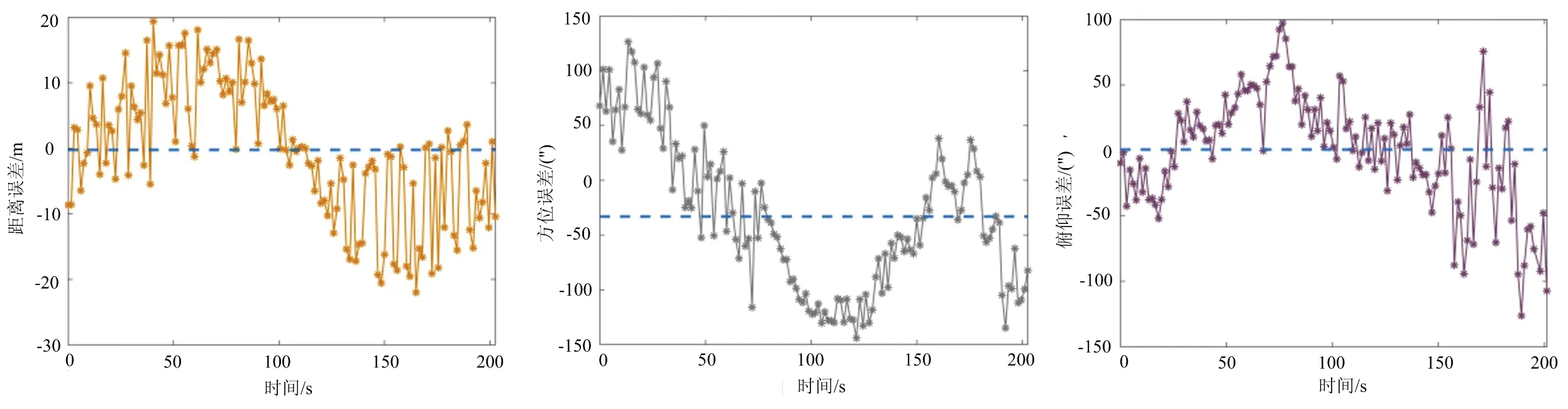
(a) 距离项残差图 (b) 方位项残差图 (c) 俯仰项残差图图5 跟踪TianPing1A卫星误差残差图

表3 雷达A测量数据误差统计表
4.2 装备状态监测
常态化开展精度分析计算可加强对装备状态的监测,当某装备的测量精度长期处于不达标状态时,可初步判断该装备状态异常,应及时安排装备端开展故障排查。
2020年5月2日在对某雷达历史测量数据回查分析时,发现自2020年3月11日起测量数据的距离项误差发生跳变,测距误差远超战技指标。根据雷达端操作记录发现,3月11日零点切换雷达跟踪脉冲宽度,但未及时对该技术状态进行精细标校,导致测距精度下降,定位问题后及时修正零值。图6统计了该装备2月28日至5月12日共计402圈次的测距系统差和随机差,从误差统计曲线可见,装备测量状态于5月3日恢复正常。这为雷达数据汇集处理中心及时预防数据库污染提供有力监管。
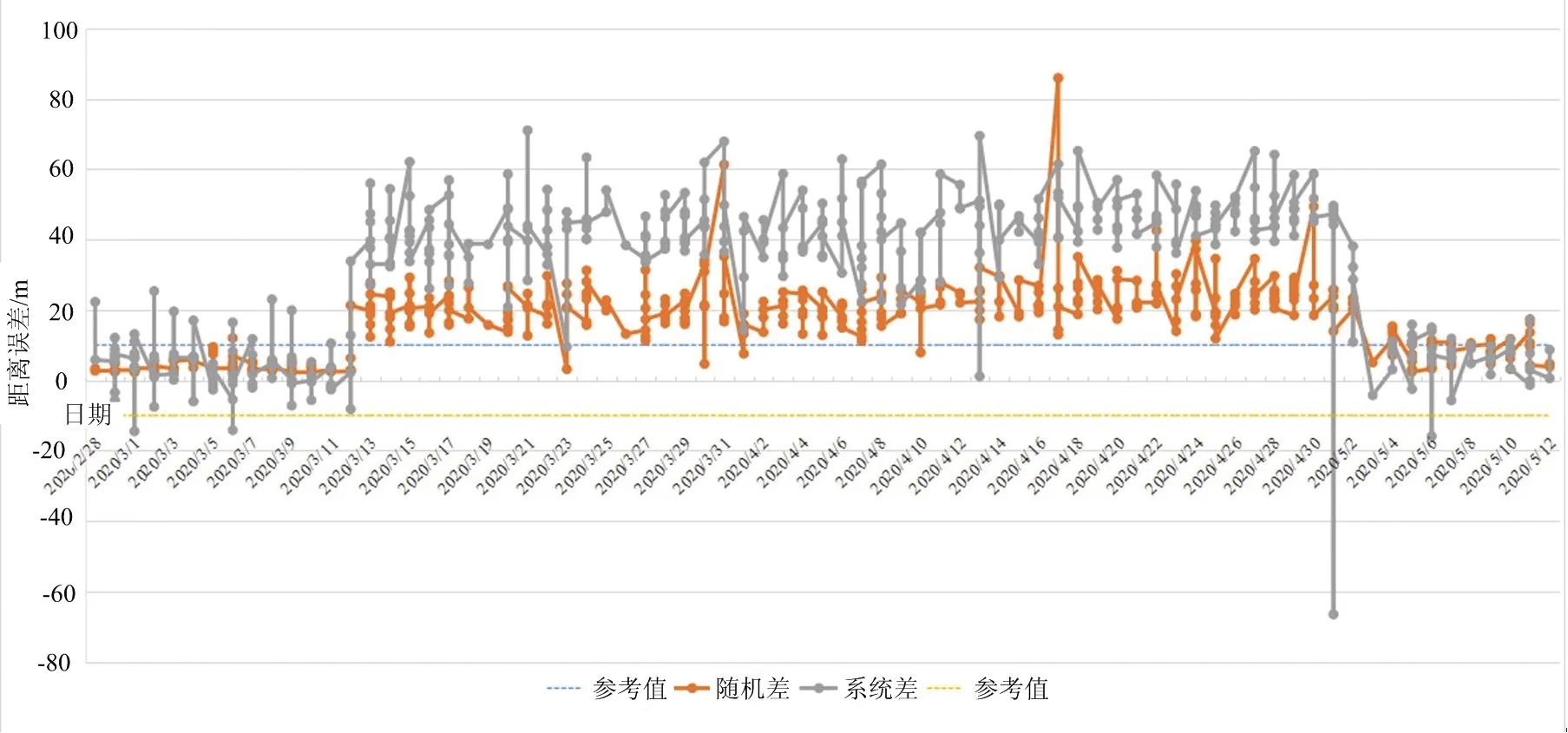
图6 某雷达2020年2月至5月测距系统差和随机差统计图
5 结束语
本文研究了以多颗低轨卫星开源精密星历为基准进行雷达测量数据精度鉴定评估的可行性及具体实施方法,分析了儒略日与公历时之间的转换关系、地固系坐标系与测站坐标系之间的空间转换方法以及拉格朗日插值算法,完成了标校星相对测站的精确位置解算,研究了野值剔除、光行差修正、大气折射修正等测量数据预处理算法。采用此方法,安排某型雷达联合观测TianPing1A、TianPing1B、LARES、AJISAI等4颗标校星,通过统计单圈次跟踪残差及3天内所有圈次跟踪总误差,鉴定了该雷达测距精度优于10 m,测角精度优于360″,根据统计规律,提出了进一步提高该雷达装备测量精度的处理方向。结合应用实例,验证了该方法在装备精度鉴定及装备状态常态化监测中的有效性及科学性。
