基于动态参数HMM的水声信号线谱轨迹提取方法
2022-06-25罗昕炜沈子涵
罗昕炜 李 磊 沈子涵
①(东南大学水声信号处理教育部重点实验室 南京 210096)
②(航空工业沈阳飞机设计研究所 沈阳 110035)
1 引言
随着人类在海洋中的活动日益频繁,水下目标的检测与感知已成为海洋信息领域的研究热点。由于声音在水下比电磁波具有更好的传播性能,声呐系统被广泛应用于水下目标的探测、识别和定位。海洋环境噪声的成分复杂多样,包括地震噪声、船舶噪声、波浪噪声、热噪声、生物噪声等。本文的主要目的是在水下声环境中提取窄带信号的线谱轨迹。
在被动声呐接收到的各种水声信号中,窄带信号通常是由人工设备或机械部件的往复运动产生的。船舶辐射噪声中的低频信号窄带线谱具有强度高、稳定性好、传播损耗低等特点,是当前水下目标探测的主要依据之一[1-3]。窄带信号可以指示目标的存在性并反映目标的状态。在多帧功率谱构成的低频分析与记录(LOw Frequency Analysis and Recording, LOFAR)图中,稳定的窄带信号将形成一条亮线,即线谱轨迹。因此,LOFAR图线谱轨迹的提取对于低噪声、安静水下目标的检测、跟踪和分类具有重要意义。LOFAR图中的线谱轨迹提取必须考虑两种类型的线谱[4]。第1类线谱具有恒定的频率,但多普勒频移随时间而发生,频率变化可以用确定的运动模型来描述。因此,目标运动分析方法可用于轨迹提取。联合概率数据关联方法[5,6]和多概率假设方法[7]都可以在线谱上实现良好的跟踪效果,并且具有较高的计算效率。第2类线谱没有明确的运动模型,其频率变化表现为随机运动。在这种情况下,基于隐马尔可夫模型(Hidden Markov Model, HMM)的动态规划算法具有良好的检测性能。文献[8,9]提出一种基于HMM的以阈值判断后的LOFAR图为输入的单线谱跟踪器。文献[10-12]以提取两个线谱为例,通过增加HMM状态变量的维数,提出了一种多线谱检测方法,但算法复杂度呈指数增长。此外,文献[13]指出,不需要增加状态变量的维数,而是通过多次跟踪单线谱来提取LOFAR图中的线谱轨迹,可以大大降低算法复杂度,并保持检测性能。因此,多次连续提取单线谱的方法得到了广泛的应用。
此外,将线谱的运动模型与隐马尔可夫模型相结合,还可以实现对第1类线谱的有效提取。文献[14]提供了多个线谱变化模型和相应的构造HMM状态变量的方法,并通过选择最佳线谱模型来提高线谱检测的性能。文献[4,15]使用2维状态变量对线谱频率及其变化率进行建模,并给出了一种不需要先验信噪比信息的线谱跟踪方法。在文献[4,14,15]中,2维状态变量建模能够适应更复杂的线性频谱变化,具有更好的适应性,但此时检测算法的计算复杂度也大大增加,难以满足实际应用的需求。文献[16-18]都引入了块处理框架来估计频率状态序列的1阶导数和2阶导数,以减少状态变量的维数和计算负担。然而,在单块线谱轨迹过程中,估计的1阶导数和2阶导数仍然是常数,这可能导致模型失配。
在此背景下,本文提出了一种基于动态转移概率矩阵1维隐马尔可夫模型的线谱检测算法,用于LOFAR图中的线谱轨迹提取。该方法的创新点在以下3方面:(1)引入具有动态转移概率矩阵的1维隐马尔可夫模型,提高了算法对复杂线谱变化的适应性以及在线谱检测中的性能;(2)提出了一种基于动态滑动窗口的功率谱累积方法,提高线谱生灭的估计能力;(3)设计了块处理框架,大大提升了算法的处理效率。仿真数据和实测数据的实验分析表明了本文方法在线谱轨迹提取能力和算法效率方面均达到较好的性能。
2 信号模型与参数
HMM是一种统计模型,它用来描述一个含有隐含未知参数的马尔可夫过程。HMM表现为一个结构简单的动态贝叶斯网络,在时序数据的建模、语音识别、水声识别[19]等领域有着广泛的应用。水声信号中的窄带成分可以刻画为在时频空间持续的线谱轨迹,在对水声信号时频分析获得的LOFAR图中,窄带成分表现为噪声背景下的时频亮点序列。HMM模型的隐藏状态、观测值和相邻时刻的状态变化可以较好地刻画水声信号窄带成分。
2.1 HMM的基本要素
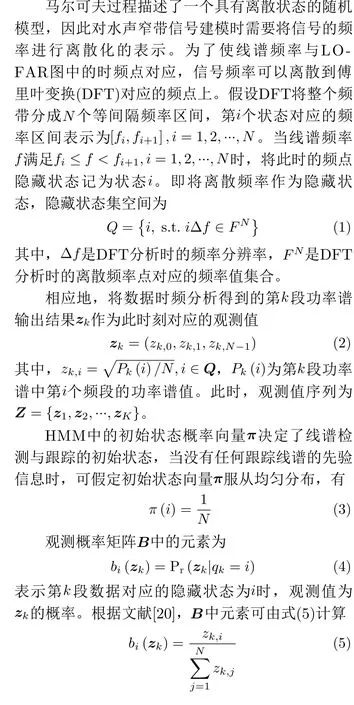
2.2 HMM的参数赋值
3 线谱轨迹提取方法与实现
3.1 处理框架
基于HMM的动态规划方法在检测LOFAR图中的线谱时,计算量与隐藏状态数呈平方关系。如果同时检测功率谱中的所有频率状态,则计算量非常大。针对上述问题,在线谱轨迹提取的过程中设计了分块处理的框架,将LOFAR图分成小的时频数据块分别进行线谱轨迹提取,再将所提取的线谱轨迹进行融合得到整个时频空间的线谱轨迹结果。基于分块处理的线谱轨迹提取方法的框架如图1所示。
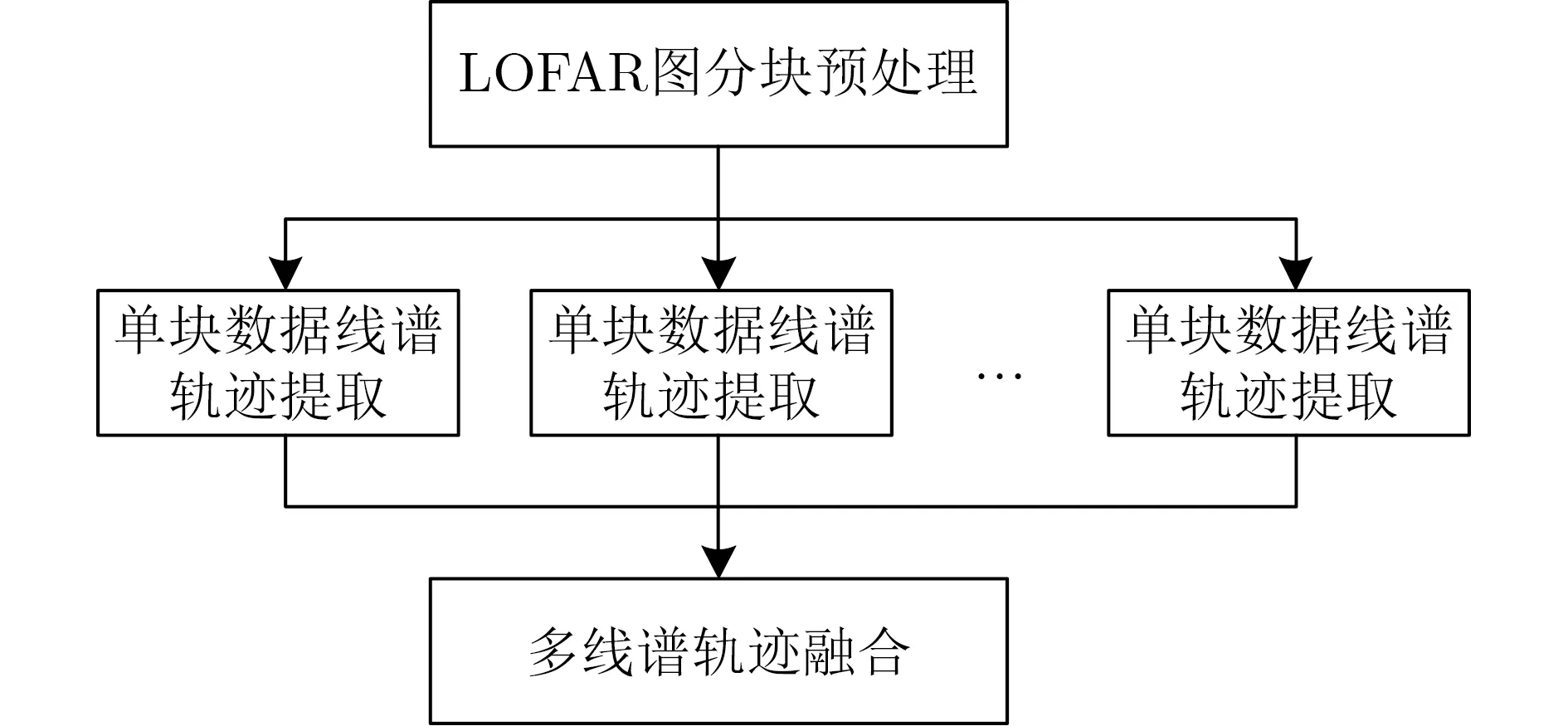
图1 基于分块处理的线谱轨迹提取框架
整个线谱轨迹提取可分为3个步骤:数据分块预处理、单块数据线谱轨迹提取和多线谱轨迹融合。
3.2 单块线谱轨迹提取
在单数据块线谱轨迹提取过程中,将HMM与频率状态变化模型相结合,在HMM的框架下设计基于动态参数线谱轨迹提取和生灭判断的方法。图2为单块数据线谱轨迹提取算法的流程图。
图2 基于动态参数的线谱检测流程图
处理流程中包括参数初始化、轨迹提取、生灭判断和数据更新几个过程。

从式(20)和式(21)可以看出,上述操作旨在根据线谱频率的变化动态调整滑动窗口的位置和形状。动态滑动窗口可以提高功率谱累积结果的信噪比,提高线谱检测性能。图3为动态滑动窗口的示意图。
图3可以看出,滑动窗口中,同一轨迹在不同时间帧产生的线谱频点对应的功率谱幅值能够直接相加,增大了功率谱累积结果的信噪比,进而提高线谱检测性能。利用3σ准则对其进行阈值比较,获得线谱轨迹点的有效性判断。
图3 基于滑动窗的线谱轨迹的生灭分析示意图
步骤4 更新时频块中的数据。提取出单根线谱的时间序列后,应去除当前时频块中与本次检测状态序列相关的幅值信息。将提取的频率状态相对应的功率谱幅度设置为背景最小值,更新后的时频块用于下一次线谱提取。重复步骤1-步骤4,直到提取的状态时间序列中的所有频率状态被步骤4判断为无效,结束当前块中的线谱提取。
3.3 多线谱轨迹融合
4 性能评估
本节利用仿真信号和实测信号对所提出算法性能进行评估,并与基于1维隐马尔可夫模型和2维隐马尔可夫模型的传统算法进行比较。
4.1 仿真数据测试
仿真信号是在高斯白噪声的背景上添加了5根线谱轨迹,线谱的宽带信噪比为-29 dB。这5根线谱轨迹具有不同变化趋势,其中线谱(1)是频率稳定的轨迹;线谱(2)和(3)是频率随时间线性变化的调频脉冲信号;线谱(4)和(5)是存在交叉的线谱轨迹,具有变化的斜率。待测LOFAR图的频带为0~625 Hz,频率分辨率为1 Hz,时间分辨率为1 s。
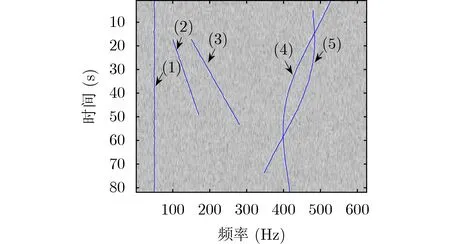
图4 待检测的LOFAR图与线谱轨迹示意
比较了6种方法对仿真信号的处理结果。这6种方法分别是传统的1D-HMM方法(1D-HMM)[17]、具有自适应滑动窗口的传统1D-HMM方法(1DW-HMM)、具有动态A矩阵1D-HMM方法(DA-HMM)、使用自适应滑动窗口的动态A的1D-HMM方法(DAWHMM)、传统的2D-HMM方法(2D-HMM)和具有自适应滑动窗口的传统2D-HMM方法(2DW-HMM)。图5显示了各种方法的处理结果。
在图5中,蓝线线条表示线谱的实际位置。“+”表示各种方法检测到的线谱点位置。检测到的点属于相同的线谱轨迹用相同颜色的“+”表示。从图中可以看出,这6种方法都可以准确提取频率变化较小的线谱,包括线谱(1)和线谱(2)。线谱(3)-线谱(5)的轨迹由于频率的变化较大或者趋势无法实时估计,因此基于1D-HMM和1DW-HMM方法在线谱频率快速变化时无法获得完整的线谱轨迹。提出的基于DA-HMM和DAW-HMM方法,以及2DHMM和2DW-HMM方法能够很好地适应复杂线谱的变化,准确地提取出所有的5条线谱。
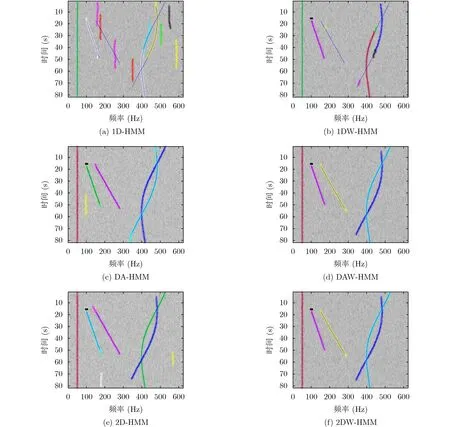
图5 6种方法的线谱轨迹提取结果比较
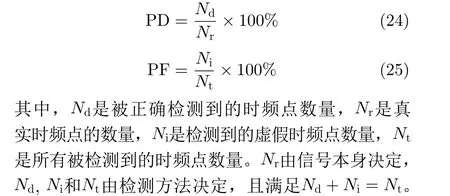
为了更直观地比较性能,定义两个变量:检测概率和虚警概率。
这些方法在一台具有8核CPU(I7 9700K)和16GB RAM的PC上进行了测试,并在MATLAB上实现并运行,测试模拟数据的时间长度为80 s。每种方法的处理时间和PD, PF如表1所示。
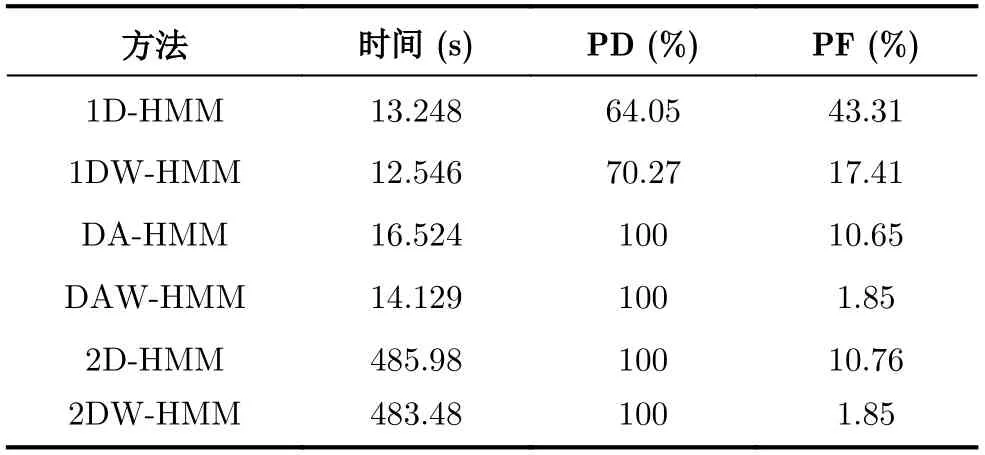
表1 不同方法的处理时间和PD, PF

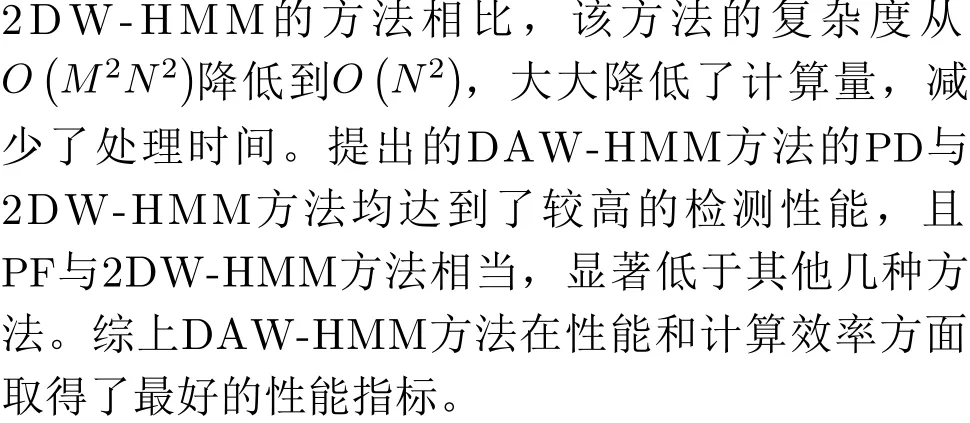
针对3根代表性线谱,在相同的 PF下对基于1D-HMM, DA-HMM和DAW-HMM的3种方法的性能进行比较。其中,线谱(1)是频率稳定的线谱轨迹;线谱(2)是频率随时间线性变化的轨迹;线谱(5)是频率变化率不恒定的线谱轨迹。在不同的信噪比条件下,首先通过调整阈值使不同方法的PF=2% ,然后比较检测概率 PD。检测概率曲线如图6所示。
从图6可以看出,传统的1D-HMM缺乏对未知斜率的估计,对变化的频率轨迹检测性能显著下降。DA-HMM和DAW-HMM的方法可以实时估计线谱频率的1阶导数,对不同线谱类型保持了较好的性能。进一步,自适应滑动窗口的使用,使得DAWHMM方法取得了最好的检测性能。
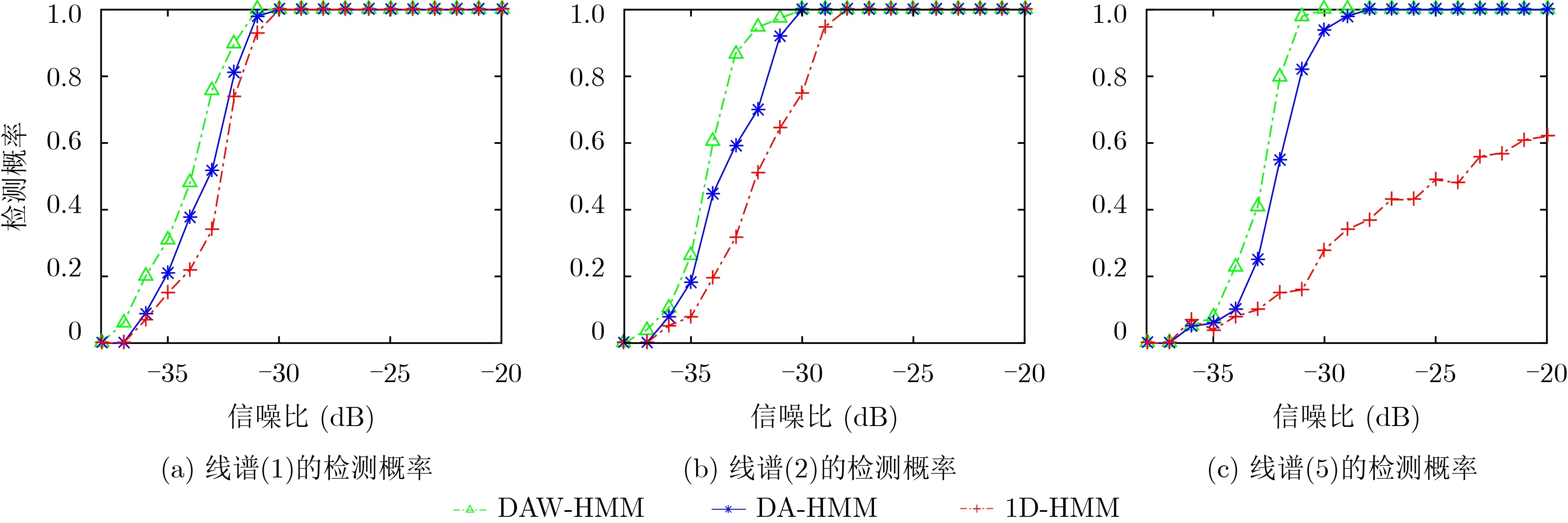
图6 对3根线谱的检测概率对比
4.2 实测数据测试
通过一次湖上试验的数据验证所提出的方法。试验现场的湖水深度约100 m,浮标的水听器被放置在水下15 m的深度,在距离浮标1 km处的同一深度放置了一个声源,距离浮标2 km处的一艘船按照指示航行,如图7所示。
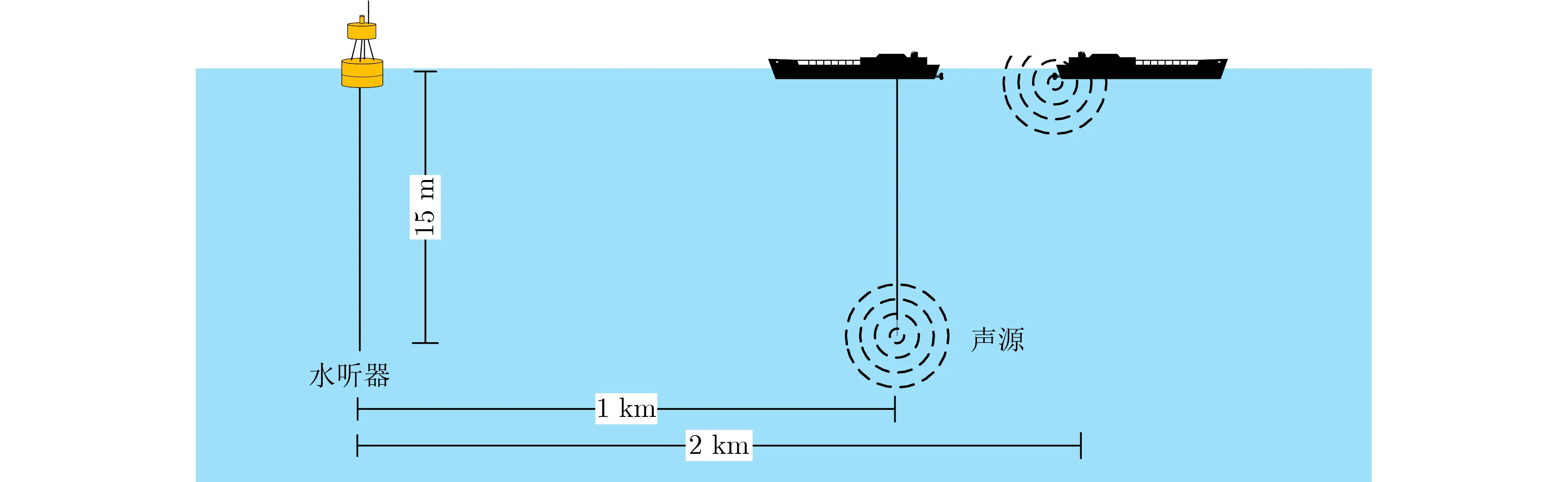
图7 实验示意图
在实验过程中,浮标以4 kHz的采样率对声信号进行采样。在对第1段数据(数据1)进行采样时,声源发出的水下信号包括固定频率的窄带信号和3组LFM脉冲信号,固定频率和LFM信号存在着频率的交叉。在对第2段数据(数据2)进行采样时,声源发出的水下信号包括固定频率的窄带信号和3组线性调频脉冲信号,还包括船舶加速的噪声。
利用DAW-HMM方法对浮标数据进行分析,两段数据的LOFAR图和对应的线谱轨迹提取结果如图8所示。
图8(a)和图8(c)分别是数据1和数据2的LOFAR图。在图8(b)、图8(d)中,提取出的固定频率线谱轨迹用红线标记,频率随时间线性变化的线谱轨迹用蓝线标记,频率变化率不恒定的线谱轨迹用绿线标记。从图中可以看出,DAW-HMM方法可以有效地检测和区分声源发射的时变线谱和交叉线谱,并正确提取加速船舶产生的漂移线谱。实验结果表明,该方法能有效地提取水声信号中的多种线谱轨迹。
图8 数据1、数据2的LOFAR图及线谱轨迹提取结果
5 结束语
本文提出了一种基于动态参数的HMM的线谱轨迹提取方法DAW-HMM。该方法将目标线谱轨迹建模为1阶隐马尔可夫过程,通过基于动态更新模型参数的动态规划,实现LOFAR图中的线谱估计检测。仿真和实验数据的对比结果表明,该方法通过引入带动态转移概率矩阵的1维隐马尔可夫模型,提高了算法对复杂线谱变化的适应性以及在线谱检测性能;通过动态滑动窗口的功率谱累积方法,提高线谱的生灭的估计能力;所设计的块处理框架,大大提升了算法的处理效率。与传统的基于1维隐马尔可夫模型和2维隐马尔可夫模型的方法相比,本文方法能够高效、准确地提取各种类型的信号线谱,且计算量较小,可以满足声呐系统实时处理的需求,为声呐设备对弱信号的检测和多特征的检测跟踪提供了一种良好的技术途径。
