抗干扰型卫星导航接收机的最优前端增益
2022-06-25鲁祖坤郭海玉孙一凡李柏渝
鲁祖坤, 郭海玉, 宋 捷, 孙一凡, 李柏渝
(国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
卫星导航在民用、军事上均发挥了不可替代的作用。以全球定位系统(global position system,GPS)为代表的卫星导航系统已成为人们生产生活不可或缺的基础设施,日常出行离不开导航,车辆、船只、飞机的正常工作离不开导航,卫星导航的授时功能在金融、通信等领域也发挥着重要作用。卫星导航的初始目的是应用于军事,卫星导航系统在坦克、舰船、导弹、精确制导炸弹的作战应用中发挥了关键作用。
导航卫星一般采用中高轨卫星星座,卫星与地球表面的平均距离超过20 000公里,导航信号到达地面时已经十分微弱。根据GPS的接口控制文件,GPS导航信号到达地面时的典型电平为-130 dBm,信号完全淹没在噪声之下。在这种情况下,由于信号十分微弱,地面的导航接收机极易被干扰。地面接收机被干扰的事件时有发生,比如光平方事件,这是一起典型的地面通信系统干扰GPS的案例。另外,空管雷达的频点与卫星导航信号的频点十分接近,甚至出现了重合,也经常发生被干扰的事件。因此,如果要使导航接收机在干扰条件下保持正常工作,就必须要通过设计提高导航接收机的抗干扰性能。通常情况下,抗干扰技术可分为单天线抗干扰技术、天线阵抗干扰技术。其中,单天线只能抑制窄带干扰,天线阵可以抑制宽带干扰。无论是单天线,还是天线阵接收机,其射频前端均包含了放大器,目的是将信号、干扰进行放大,以便于模数转换器(analog to digital converter, ADC)进行采样。前端放大器的增益可以分为自动增益和固定增益。自动增益控制可以将脉冲干扰在模拟电路部分进行抑制,还可以保证ADC量化时的有效位数。但是,自动增益控制将数字端与模拟端联合起来控制,无疑增加了接收机的复杂性,而且在控制增益的过程中可能会导致射频通道时延的变化。因此,随着射频通道动态范围的增加,以及ADC量化位数的展宽,现在一般采用固定增益的前端放大器。单天线与天线阵接收机的射频通道功能一致,仅存在指标性能上的差异,本文以单天线为例研究前端放大器的增益。
本文作者团队在研制北斗三号某链路抗干扰型导航接收机时发现射频前端增益的大小会引起抗干扰能力与ADC量化损耗的矛盾。基于此矛盾,本文以抗干扰性能最优为目标,就前端放大器的增益展开研究。首先,建立射频通道、ADC的数学模型。其次,分别分析了在无干扰情况下前端增益对信号采样的影响、干扰条件下的抗干扰极限性能。然后,针对前端增益对信号接收与抗干扰性能之间的矛盾,以抗干扰性能为优化目标提出了最优的前端增益设计方法,并分别通过仿真和实测验证了本文分析结论的准确性和提出方法的有效性。最后,对全文工作进行了总结。
1 数学模型
卫星导航接收机的系统组成如图1所示,由模拟电路、数字电路两部分组成。其中模拟电路部分包括天线、低噪放、混频器、滤波器、放大器、ADC,数字电路部分包含的功能主要有数字下变频、抗干扰、捕获与跟踪、位置计算等。放大器的作用是保证ADC 在采样过程中有足够多的有效位数,以确保信号在采样过程中产生的损耗较小。

图1 卫星导航接收机系统框图Fig.1 Block diagram of satellite navigation receiver system
假设天线接收到的信号和干扰分别为()和(),整个模拟电路信号产生的噪声为(),模拟电路的等效滤波器为(),滤波器的增益为,那么ADC输入的模拟信号可表示为
()=()⊗(()+()+())
(1)
式中:⊗表示卷积。
经过ADC量化后的信号为
()=()=floor(())
(2)
式中:floor(·)为向下取整。
假设ADC的量化位宽为,在考虑限幅因素,即量化溢出的情况下,式(2)进一步表示为

(3)
设置量化位宽为12 bit,对单载波信号进行采样,限幅前后的时域比较如图2所示。

图2 限幅对信号时域失真的影响Fig.2 Influence of limiter on time domain distortion of signal
2 前端增益对抗干扰性能的影响
由于式(2)中floor(·)的存在、式(3)中的限制,会导致()相比于原始的()发生失真。如果足够大,在不考虑的情况下,()的失真越小;反之,足够小时,()的失真越大。但是,如果()的范围较大,在约束的情况下,会导致()较大的失真。floor(·)的物理意义即为量化,的物理意义即为ADC的最大可测量值,的存在可能引起()的限幅,下面在考虑量化与限幅的情况下,分析前端增益对抗干扰型导航接收机的影响。
2.1 前端增益对无干扰情况下载噪比的影响
在无干扰的情况下研究信号载噪比(carrier to noise ratio, CNR)损耗的问题,可以等效为传统的无抗干扰能力接收机中ADC位宽的影响分析。由于GPS导航信号到达导航接收机中的电平较小,通常为-130~-160 dBm,有用信号湮没在噪声中,通常不考虑限幅因素导致的CNR损耗,在此情况下,ADC量化位宽越大,CNR损耗越小。
图3为无干扰条件下ADC位宽对CNR的影响。在约束前端增益时,ADC位宽越大,信号失真越小,信号的CNR损耗越小。但是随着ADC位宽持续增加,CNR逐渐趋近于无干扰情况下的CNR理论值,CNR损耗的可优化空间越来越小。即在CNR损耗最小的情况下,ADC位宽存在最小值,此时认为量化误差最小,可以忽略不计。
在保证ADC位宽不限幅的情况下,前端增益越大,ADC可以采集到功率更大的有用信号,有用信息更详细,当前端增益足够大且不限幅时,量化误差基本消除,CNR损耗可优化空间忽略不计。

图3 无干扰情况下的ADC位宽对CNR影响Fig.3 Effect of ADC bit on CNR without interference
2.2 前端增益对抗干扰极限性能的影响
抗干扰的极限性能受限于ADC的量化位宽:由式(1)~式(3)可知,ADC位宽越大,数字功率越大,可获取的干扰信号功率的动态范围越大,抗干扰极限性能越大。
在保证ADC不限幅的情况下,前端增益越小,无干扰情况下采样数据的实际字长越小,ADC就可以采集到越大的干扰,抗干扰极限性能越优。因此,在ADC不限幅且有用信号功率达到最低灵敏度的情况下,前端增益可以无限小。但是在考虑ADC限幅因素时,干扰、信号均会产生较大的失真,影响抗干扰性能,又会引起信号CNR较大的损耗。
图4所示为不同限幅比例情况下单频、窄带干扰情况下的频谱。在单频干扰情况下,可以明显看出,限幅比例越大,单频干扰引起的杂散越大。在窄带干扰情况下,限幅比例越大,同样会引起较大的杂散,由于窄带干扰具有一定的带宽,其杂散已经引起了整个噪底的抬升,时频域抗干扰已经无法有效地抑制干扰。
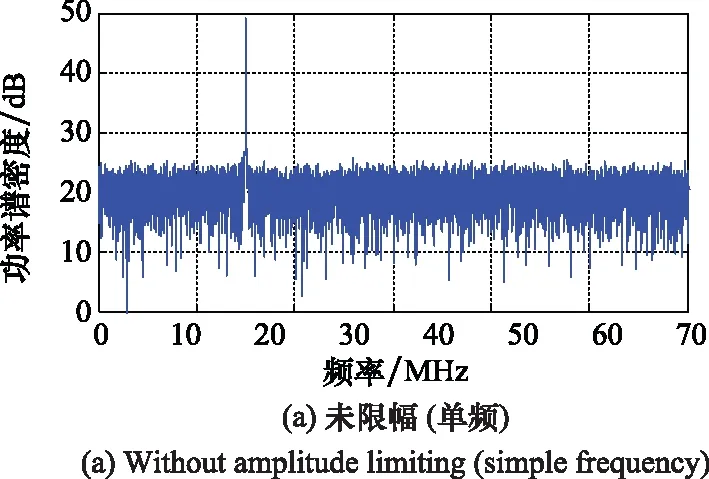

图4 不同限幅场景下的干扰频谱图Fig.4 Interference spectrum diagram under different limiting scenarios
3 抗干扰性能最优的前端增益
3.1 前端增益的矛盾性分析
在无干扰的情况下,式(2)可进一步表示为
()=floor[()⊗(()+())]
(4)
式(4)在不考虑ADC限幅的情况下,仅受量化误差的影响,而量化导致的相对误差与量化前模拟量的绝对电平有直接关系,绝对电平越大,相对误差越小。因此,在无干扰的情况下,前端增益应该尽可能大。
将式(1)代入式(3)可知,在考虑干扰极限性能,且ADC不限幅的情况下,前端增益越小,干扰功率可以越大。因此,在干扰极限的情况下,前端增益应该尽可能小。
综上所述,前端增益在无干扰与干扰极限的不同场景下,存在矛盾。
3.2 最优前端增益
需要综合考虑无干扰与干扰极限的不同场景对前端增益进行优化设计。在无干扰的情况下,CNR的损耗主要由量化误差导致,记为CNR。在考虑干扰极限的情况下,量化误差可忽略不计,CNR的损耗主要由抗干扰、限幅导致,总的损耗记为CNR。前端增益直接影响CNR和CNR。假设在无干扰情况下的CNR理论值为CNR,导航接收机在最低灵敏度情况下的CNR为CNR。在满足下式的情况下,接收机均可正常工作:
CNR-max{CNR,CNR}≥CNR
(5)
通常情况下,满足式(15)的前端增益并不是一个定值,而是一个范围。为了进一步提升接收机的抗干扰极限性能,在式(5)中取等号,此时的前端增益是满足抗干扰性能优化目标下的最优增益。
4 实验验证
4.1 仿真验证
仿真验证实验模拟真实接收机处理流程,同时信号、干扰、增益可以精确控制,仿真验证流程如图5所示。其中,干扰生成、信号生成、噪声生成、数据合成、放大器中的数据均为全精度的数据类型,量化模块用于模拟ADC的过程。

图5 仿真测试流程图Fig.5 Flow diagram of simulation test
仿真实验的参数设置如表1所示。

表1 仿真实验的参数设置
设置信号CNR分别为55 dBHz、50 dBHz、45 dBHz、40 dBHz,对不同CNR信号分析前端增益对CNR估计的影响程度,仿真结果如图6所示。

图6 无干扰情况下前端增益对CNR的影响(仿真)Fig.6 Effect of front-end gain on CNR without interference (simulation)
根据图6可知,当前端增益在20 dB以下时,采样数据受ADC量化误差的影响较大,量化误差随前端增益的提升不断减小,CNR也出现了随前端增益的提升而提升,当前端增益提高到20 dB以上时,量化误差不再是主要的误差源,CNR提升不再明显。因此,对于无干扰条件下的最优前端增益为大于20 dB。
干扰设置为2 MHz带宽的高斯白噪声,干扰场景下不同信号的前端增益变化对抗干扰极限性能的影响程度如图7所示。仿真实验中信号可接收的最低CNR为35 dBHz,将CNR作为抗干扰的评估方法,当CNR为35 dBHz时设置的干扰功率即为当前场景下的抗干扰极限,其中抗干扰方法采用传统的1/2重叠加窗频域法。随着前端增益的加大,有用信号被采集到的信息更详细,抗干扰极限性能增加;但是当前端增益持续增加时,ADC限幅影响导致信号与干扰失真,引起CNR较大损耗,抗干扰极限性能出现下降趋势。仿真实验与理论推导一致,增益过小会导致无干扰情况下的CNR损耗,甚至出现无法接收信号的情况,增益过大会导致抗干扰极限性能下降。

图7 前端增益对抗干扰极限性能的影响(仿真)Fig.7 Effect of front-end gain on the anti-interference limit performance (simulation)
4.2 实测验证
为了排除多径、天线、卫星运动等因素对信号接收及抗干扰的影响,采用信号源、干扰源、接收机的有线测试方法,测试框图如图8所示。

图8 实测验证测试框图Fig.8 Test block diagram of actual verification
其中,接收机采用北斗全球系统某链路接收终端,前端增益可以通过计算机进行调整,调整范围为0~60 dB,步进为1 dB。计算机用于控制接收机的前端增益、统计接收机输出的CNR。
图9所示为无干扰情况下前端增益对CNR的影响,当增益在40 dB以下时,CNR随增益的提升而升高,当增益提高到40 dB以上时,CNR提升不明显。

图9 无干扰情况下前端增益对CNR的影响(实测)Fig.9 Effect of front-end gain on CNR without interference (actual measurement)
图10所示为前端增益对抗干扰极限性能的影响,当增益在40 dB以下时,抗干扰极限性能随增益的递增同样呈现递增的趋势,但是当增益提高到40 dB以上时,抗干扰极限性能呈现递减的趋势。

图10 前端增益对抗干扰极限性能的影响(实测)Fig.10 Effect of front-end gain on the anti-interference limit performance(actual measurement)
通过无干扰情况下前端增益对CNR的影响分析可知,在约束ADC位宽的情况下,前端增益越大,信号失真越小,信号的信噪比损耗越小。但是,随着前端增益的持续增加,CNR的提升不再明显,即在CNR最大的情况下,前端增益存在最小值。前端增益对抗干扰极限性能的影响分析表明:在无前端增益时,抗干扰极限性能虽然不受限幅影响,但是CNR低于接收机最低灵敏度,信号无法被捕获,抗干扰极限性能较低;随着前端增益增大,在仍然不受限幅影响的情况下,CNR理论值提升,抗干扰极限性能增大;前端增益持续增大,受ADC位宽限幅影响,干扰与信号出现失真,抗干扰极限性能减小。实测验证的现象与仿真试验、理论分析一致。
5 结 论
在实际导航接收机的开发工作中,传统的方法是通过不断调试前端增益,以满足实际需求,缺乏理论支撑。本文从理论上分析了最优前端增益存在的原因,提出了最优前端增益的试验方法,利用仿真、实测的方法对提出的理论进行了验证。可以从两个方面设计前端增益:一是信号角度,前端增益不应过小,使信号经ADC采样后的CNR高于接收机最低灵敏度;二是干扰角度,在不受限幅影响的前提下,前端增益应该尽可能小,以提高抗干扰极限性能;应避免前端增益过大,ADC限幅将导致信号与干扰产生失真。本文提出的方法已经应用于北斗卫星导航系统的多个链路中,并取得较好效果。
